技术特征:
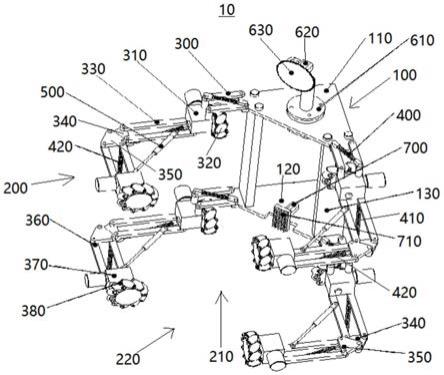
1.一种爬升机器人,用于沿爬升物(11)爬升,其特征在于,所述爬升机器人包括:机体(100);以及环抱设置在所述机体(100)上的多只机械腿(200);所述多只机械腿(200)之间形成用于环抱所述爬升物(11)的通道(210);所述多只机械腿(200)远离所述机体(100)的一端共同形成可供所述爬升物(11)进入所述通道(210)的开放口(220);其中,所述机械腿(200)包括第一连杆(300)、第二连杆(330)、第三连杆(360)、第一全向轮(320)以及第二全向轮(380),所述第一连杆(300)、所述第二连杆(330)以及所述第三连杆(360)依次铰接且铰接角度可控,所述第一连杆(300)远离所述第二连杆(330)的一端铰接在所述机体(100)上;所述第一全向轮(320)设置在所述第一连杆(300)与第二连杆(330)的铰接处,所述第二全向轮(380)设置在所述第三连杆(360)远离所述第二连杆(330)的一端,所述第一全向轮(320)以及所述第二全向轮(380)用于与所述爬升物(11)爬升配合。2.根据权利要求1所述的爬升机器人,其特征在于:所述机械腿(200)还包括第一驱动电机(310)以及第二驱动电机(370),所述第一全向轮(320)安装在所述第一驱动电机(310)上,所述第二全向轮(380)安装在所述第二驱动电机(370)上;所述第一连杆(300)靠近所述第二连杆(330)的一端铰接在所述第一驱动电机(310)上,所述第二连杆(330)靠近所述第一连杆(300)的一端铰接在所述第一驱动电机(310)上;所述第三连杆(360)远离所述第二连杆(330)的一端铰接在所述第二驱动电机(370)上。3.根据权利要求2所述的爬升机器人,其特征在于:所述第一驱动电机(310)以及所述第二驱动电机(370)均为自锁电机。4.根据权利要求2所述的爬升机器人,其特征在于:所述机械腿(200)还包括相互铰接的第一关节块(340)以及第二关节块(350),所述第二连杆(330)靠近所述第三连杆(360)的一端铰接在所述第一关节块(340)上,所述第三连杆(360)靠近所述第二连杆(330)的一端铰接在所述第二关节块(350)上。5.根据权利要求4所述的爬升机器人,其特征在于:所述机械腿(200)还包括第一张紧弹簧(400)、第二张紧弹簧(410)以及第三张紧弹簧(420),所述第一张紧弹簧(400)的两端分别连接所述机体(100)以及所述第一驱动电机(310),所述第二张紧弹簧(410)的两端分别连接所述第一驱动电机(310)以及所述第一关节块(340),所述第三张紧弹簧(420)的两端分别连接所述第二关节块(350)与所述第二驱动电机(370)。6.根据权利要求5所述的爬升机器人,其特征在于:所述第一连杆(300)包括并排间隔设置的第一杆以及第二杆,所述第一杆以及所述第二杆共同铰接在所述机体(100)与所述第一驱动电机(310)上;所述第二连杆(330)包括并排间隔设置的第三杆以及第四杆,所述第三杆以及所述第四杆共同铰接在所述第一驱动电机(310)与所述第一关节块(340)上;所述第三连杆(360)包括并排间隔设置的第五杆以及第六杆,所述第五杆以及所述第六杆共同铰接在所述第二关节块(350)与所述第二驱动电机(370)上。7.根据权利要求6所述的爬升机器人,其特征在于:
所述第一张紧弹簧(400)设置在所述第一杆与所述第二杆相互远离的一端之间;所述第二张紧弹簧(410)设置在所述第三杆与所述第四杆相互远离的一端之间;所述第三张紧弹簧(420)设置在所述第五杆与所述第六杆相互远离的一端之间。8.根据权利要求5所述的爬升机器人,其特征在于:所述机械腿(200)还包括夹持缸(500),所述夹持缸(500)包括缸体以及与所述缸体活动连接的夹持杆,所述缸体铰接在所述第二连杆(330)上,所述夹持杆位于所述缸体外的一端铰接在所述第三连杆(360)上;所述夹持缸(500)用于在所述夹持杆相对所述缸体伸缩的过程中驱动所述第二连杆(330)与所述第三连杆(360)展开或者合拢。9.根据权利要求1-8任一项所述的爬升机器人,其特征在于:所述爬升机器人还包括可转动地设置在所述机体(100)上的安装平台(610),所述安装平台(610)用于安装锯片机械臂(620)或者相机机械臂。10.根据权利要求1-8任一项所述的爬升机器人,其特征在于:所述爬升机器人还包括耙齿板(710),所述耙齿板(710)可移动地设置在所述机体(100)上,所述耙齿板(710)用于在移动到预设位置的情况下扎入所述爬升物(11),并与所述爬升物(11)固定。
技术总结
本发明的实施例提供了一种爬升机器人,涉及机器人领域。旨在改善现有机器人爬升避障存在困难的问题。爬升机器人包括机体以及多只机械腿;多只机械腿环抱设置在机体上,多只机械腿之间形成用于环抱爬升物的通道以及开放口;其中,第一连杆、第二连杆以及第三连杆依次铰接且铰接角度可控;第一全向轮设置在第一连杆与第二连杆的铰接处,第二全向轮设置在第三连杆远离第二连杆的一端,第一全向轮以及第二全向轮用于与爬升物爬升配合。采用全向轮作为驱动轮,爬升机器人可以实现绕树杆旋转,同时设置开放口,可以避开爬升物上的障碍物,具有避障功能;同时,采用三节连杆,配合两个全向轮,不受爬升物直径限制,爬升能力强。爬升能力强。爬升能力强。
技术研发人员:曾文浩 郭伟科 张华伟 陈启愉
受保护的技术使用者:广东省科学院智能制造研究所
技术研发日:2021.12.31
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。