一种mmc交流侧近端不对称故障短路电流计算方法
技术领域
1.本发明涉及柔性直流输电系统技术领域,尤其是涉及一种mmc交流侧近端不对称故障短路电流计算方法。
背景技术:
2.相比于常规直流输电,柔性直流输电没有换相失败、电网补偿无功的问题,能够独立调节有功及无功,其谐波水平低,易于构建多端系统,可为弱系统甚至无源系统供电,特别适用于可再生能源发电并网。而模块化多电平换流器(modular multilevel converter,mmc)让柔性直流输电系统的传输能力和电压等级得到巨大提升,使柔性直流输电得到了更广泛的使用,例如南汇、厦门、舟山、南澳、鲁西、张北、乌东德等七项柔直工程的建设,与大规模清洁能源基地的开发同步快速发展。随着柔性直流输电系统接入电网的电压提升和传输功率的增大,系统故障时,mmc交流侧产生的故障电流也十分巨大。因此分析mmc产生短路电流的机制和影响范围,对于电网建设、电力设备选型及继电保护设置意义重大。
3.目前已有研究主要针对电网换相换流器(line commutated converter,lcc)交流侧故障,较少涉及mmc故障电流分析。考虑到mmc的系统结构和控制系统特性与lcc完全不同,已有的lcc交流侧故障电流分析和计算方法无法直接应用于mmc。此外,当前研究对于mmc-hvdc系统在交流电网故障场景,主要考虑了mmc近端产生三相对称故障下的电流影响机制,不对称故障后mmc短路电流的特性和影响因素缺少相应的研究。事实上,不对称故障在电力系统实际运行中较对称故障出现频率更高,因此有必要研究不对称故障后mmc短路电流特性,特别是内环电流控制器、外环功率控制器以及限流控制器等环节在不对称故障后的响应特性及交互影响。
技术实现要素:
4.本发明所要解决的技术问题是:提供一种mmc交流侧近端不对称故障短路电流计算方法,为mmc控制器参数整定、交流系统继电保护参数整定提供参考。
5.为了解决上述技术问题,本发明采用的技术方案为:一种mmc交流侧近端不对称故障短路电流计算方法,包括步骤:
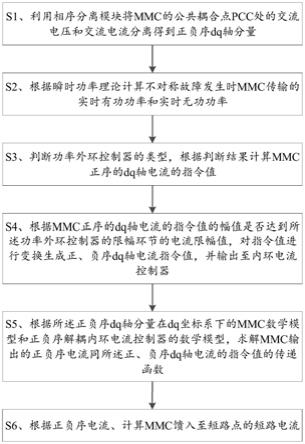
6.s1、利用相序分离模块将mmc的公共耦合点pcc处的交流电压us和交流电流is分离至正、负序dq轴分量,得到
7.s2、根据瞬时功率理论计算不对称故障发生时mmc传输的实时有功功率p和实时无功功率q;
8.s3、判断功率外环控制器的类型,根据判断结果计算mmc正序的dq轴电流的指令值
9.s4、根据的幅值是否达到所述功率外环控制器的限幅环节的电流限
幅值,对进行变换生成正、负序dq轴电流指令值并输出至内环电流控制器;
10.s5、根据所述正、负序dq轴分量在dq坐标系下的mmc数学模型和正负序解耦内环电流控制器的数学模型,求解mmc输出的正负序电流同所述正、负序dq轴电流的指令值的传递函数;
11.s6、根据正负序电流计算mmc馈入至短路点的短路电流。
12.本发明的有益效果在于:本发明提供一种mmc交流侧近端不对称故障短路电流计算方法,当mmc近端交流侧发生不对称故障时,通过计算mmc馈入至pcc点的短路电流大小,为研究mmc交流系统故障特性提供了理论依据,进而为mmc控制器参数整定、交流系统继电保护参数整定提供了参考,并用于分析mmc近端交流侧发生不对称故障后,mmc传输的有功功率和无功功率特性。
附图说明
13.图1为本发明实施例的一种mmc交流侧近端不对称故障短路电流计算方法的流程图;
14.图2为双端mmc-hvdc系统交流侧故障示意图;
15.图3为本发明实施例的mmc控制系统框图;
16.图4为本发明实施例的直流电压控制器;
17.图5为本发明实施例的正负序电流解耦控制框图;
18.图6为本发明实施例短路电流计算流程框图;
19.图7为本发明实施例短路电流仿真曲线对比图。
具体实施方式
20.为详细说明本发明的技术内容、所实现目的及效果,以下结合实施方式并配合附图予以说明。
21.请参照图1至图7,一种mmc交流侧近端不对称故障短路电流计算方法,包括步骤:
22.s1、利用相序分离模块将mmc的公共耦合点pcc处的交流电压us和交流电流is分离至正、负序dq轴分量,得到
23.s2、根据瞬时功率理论计算不对称故障发生时mmc传输的实时有功功率p和实时无功功率q;
24.s3、判断功率外环控制器的类型,根据判断结果计算mmc正序的dq轴电流的指令值
25.s4、根据的幅值是否达到所述功率外环控制器的限幅环节的电流限幅值,对进行变换生成正、负序dq轴电流指令值并输出至内环电流控制器;
26.s5、根据所述正、负序dq轴分量在dq坐标系下的mmc数学模型和正负序解耦内环电流控制器的数学模型,求解mmc输出的正负序电流同所述正、负序dq轴电流的指令值的传递函数;
27.s6、根据正负序电流计算mmc馈入至短路点的短路电流。
28.由上述描述可知,本发明的有益效果在于:当mmc近端交流侧发生不对称故障时,通过计算mmc馈入至pcc点的短路电流大小,为研究mmc交流系统故障特性提供了理论依据,进而为mmc控制器参数整定、交流系统继电保护参数整定提供了参考,并用于分析mmc近端交流侧发生不对称故障后,mmc传输的有功功率和无功功率特性。
29.进一步地,所述s1具体包括以下步骤:
30.s11、采集所述公共耦合点pcc的所述交流电压us和所述交流电流is;
31.s12、根据式(1)和(2)分别计算出所述交流电压us和所述交流电流is在两相静止坐标系下的电压分量u
α
、u
β
和电流分量i
α
、i
β
;
[0032][0033]
其中u
s,a
、u
s,b
、u
s,c
为所述交流电压us的三相分量;
[0034][0035]
其中i
s,a
、i
s,b
、i
s,c
为所述交流电流的三相分量;
[0036]
s13、根据式(3)和(4)分别计算两相静止坐标系下的电压正负序分量和电流正负序分量
[0037][0038]
其中是一个90
°
滞后的移相运算;
[0039][0040]
s14、根据式(5)和(6)分别计算出pcc点电压和电流在dq轴同步旋转坐标系下的正负序分量和
[0041][0042][0043]
其中θ为pcc点电压矢量旋转角度。
[0044]
由上述描述可知,通过采集pcc点交流电压和交流电流,结合相序分离环节,利用式(1)和式(2)将三相电压电流转换至αβ坐标系下的电压分量和电流分量,再利用式(3)至式(6)即可完成αβ坐标系下的正负序分离工作,将pcc点交流电压和交流电流变换至dq轴同步旋转坐标系下。
[0045]
进一步地,所述s2具体为:
[0046]
根据式(7)计算出mmc传输的所述实时有功功率p和所述实时无功功率q:
[0047][0048]
由上述描述可知,由步骤s1得到正、负序dq轴电压和电流分量由上述描述可知,由步骤s1得到正、负序dq轴电压和电流分量后,即可通过式(7)计算得到交流系统不平衡状态下mmc实时传输的有功和无功的功率。
[0049]
进一步地,所述s3中判断功率外环控制器的类型具体为:
[0050]
判断所述功率外环控制器的有功类控制方式是定有功功率控制还是定直流电压控制,判断所述功率外环控制器的无功类控制方式是定无功功率控制还是定交流电压控制。
[0051]
由上述描述可知,mmc的功率外环控制器可分为有功类控制器和无功类控制器,即
控制方式也分为有功控制和无功控制,而其中有功控制又包括定有功功率控制和定直流电压控制,无功控制又包括定无功功率控制和定交流电压控制,因此,在计算mmc正序的dq轴电流的指令值前,需要判断mmc功率外环控制器的类型,以便后续根据类型计算相应的电流指令值,避免误差和误算。
[0052]
进一步地,所述s3具体包括以下步骤:
[0053]
s31、判断所述功率外环控制器的有功类控制方式是定有功功率控制还是定直流电压控制,若为定有功功率控制,则mmc正序d轴电流指令值的公式如式(8):
[0054][0055]
其中p
ref
为mmc有功功率指令值,k
pp1
和k
ii1
分别为定有功功率控制器的比例系数和积分系数;
[0056]
若为定直流电压控制,则mmc正序d轴电流指令值的公式如式(9):
[0057][0058]
其中为直流电压参考值,u
dc
为直流电压实测值,k
pp2
和k
ii2
分别为定直流电压控制器的比例系数和积分系数;
[0059]
s32、判断所述功率外环控制器的无功类控制方式是定无功功率控制还是定交流电压控制,若为定无功功率控制,则mmc正序q轴电流指令值的公式如式(10):
[0060][0061]
其中q
ref
为mmc无功功率指令值,k
pp3
和k
ii3
分别为定无功功率控制器的比例系数和积分系数;
[0062]
若为定交流电压控制,则mmc正序q轴电流指令值的公式如式(11):
[0063][0064]
其中为交流电压参考值,u
ac
为交流电压实测值,k
pp4
和k
ii4
分别为定交流电压控制器的比例系数和积分系数。
[0065]
由上述描述可知,在判断了功率外环控制器的类型之后,便可根据对应的类型选择对应的算式计算得到mmc正序有功功率、无功功率的电流指令值。
[0066]
进一步地,所述s4具体包括以下步骤:
[0067]
s41、根据式(12)对进行变换生成正序dq轴电流指令值式(12)如下:
[0068]
[0069][0070]
其中i
lim
为所述功率外环控制器的电流限幅值;
[0071]
s42、负序dq轴电流指令值设置为0。
[0072]
由上述描述可知,功率外环控制器生产的正序有功功率和无功功率的电流指令值会经过电流限幅环节,因此需要将其限制在允许的范围内,以避免mmc过电流引发继电保护动作;此外,负序dq轴电流指令值通常设置为0以减小不对称故障发生后系统中产生的负序电流。
[0073]
进一步地,所述s5具体包括以下步骤:
[0074]
s51、所述mmc数学模型如式(13)和(14):
[0075][0076][0077]
其中r和l分别表示mmc所连交流系统的等效电阻和电感,ω为交流系统的角频率;
[0078]
s52、所述正负序解耦内环电流控制器的数学模型如式(15)和(16):
[0079][0080][0081]
其中k
p1
、k
p2
和k
i1
、k
i2
分别为正序dq轴内环电流控制器的比例系数和积分系数,k
p3
、k
p4
和k
i3
、k
i4
分别为负序dq轴内环电流控制器的比例系数和积分系数;
[0082]
s53、mmc输出的正负序电流同所述正、负序dq轴电流指令值同所述正、负序dq轴电流指令值的传递函数如式(17):
[0083][0084]
由上述描述可知,在功率外环控制器生成的正、负序dq轴电流指令值的基础上,建立如式(13)和式(14)的mmc数学模型以及如式(15)和式(16)的正负序解耦内环电流控制器的数学模型,最后利用拉普拉斯变换构建mmc正负序电流结构控制框图,mmc正负序电流可独立对电流指令值做出响应,从而建立了mmc正负序电流同正、负序dq轴电流指令值的直接量化关系,即式(17)的传递函数。
[0085]
进一步地,所述s6具体为:
[0086]
根据式(18)计算mmc馈入至短路点的短路电流:
[0087][0088]
其中ia、ib和ic即为所述短路电流。
[0089]
由上述描述可知,式(18)对mmc的正负序电流进行反帕克变换,从而得到mmc馈入至短路点的短路电流,为研究mmc交流系统故障特性提供了理论依据,进而为mmc控制器参数整定、交流系统继电保护参数整定提供了参考。
[0090]
请参照图1,本发明的实施例一为:
[0091]
一种mmc交流侧近端不对称故障短路电流计算方法,运用于mmc-hvdc系统交流电网侧故障时,尤其是在不对称故障的情况下,对短路电流的特性和影响因素进行分析,包括步骤:
[0092]
s1、利用相序分离模块将mmc的公共耦合点pcc处的交流电压us和交流电流is分离至正、负序dq轴分量,得到
[0093]
s2、根据瞬时功率理论计算不对称故障发生时mmc传输的实时有功功率p和实时无功功率q;
[0094]
s3、判断功率外环控制器的类型,根据判断结果计算mmc正序的dq轴电流的指令值
[0095]
s4、根据的幅值是否达到功率外环控制器的限幅环节的电流限幅值,对进行变换生成正、负序dq轴电流指令值并输出至内环电流控制器;
[0096]
s5、根据正、负序dq轴分量在dq坐标系下的mmc数学模型和正负序解耦内环电流控制器的数学模型,求解mmc输出的正负序电流同正、负序dq轴电流的指令值的传递函数;
[0097]
s6、根据正负序电流计算mmc馈入至短路点的短路电流。
[0098]
即在本实施例中,当mmc近端交流侧发生不对称故障时,通过计算mmc馈入至pcc点的短路电流大小,为研究mmc交流系统故障特性提供了理论依据,进而为mmc控制器参数整定、交流系统继电保护参数整定提供了参考,并用于分析mmc近端交流侧发生不对称故障后,mmc传输的有功功率和无功功率特性。
[0099]
如图2至图7,本发明的实施例二为:
[0100]
一种mmc交流侧近端不对称故障短路电流计算方法,在上述实施例一的基础上,在本实施例中,步骤s1具体包括以下步骤:
[0101]
s11、采集公共耦合点pcc的交流电压us和交流电流is;
[0102]
s12、根据式(1)和(2)分别计算出交流电压us和交流电流is在两相静止坐标系下的电压分量u
α
、u
β
和电流分量i
α
、i
β
;
[0103][0104]
其中u
s,a
、u
s,b
、u
s,c
为交流电压us的三相分量;
[0105][0106]
其中i
s,a
、i
s,b
、i
s,c
为交流电流的三相分量;
[0107]
s13、根据式(3)和(4)分别计算两相静止坐标系下的电压正负序分量和电流正负序分量
[0108][0109]
其中是一个90
°
滞后的移相运算;
[0110][0111]
s14、根据式(5)和(6)分别计算出pcc点电压和电流在dq轴同步旋转坐标系下的正负序分量和
[0112][0113][0114]
其中θ为pcc点电压矢量旋转角度。
[0115]
即在本实施例中,采集如图2所示的双端mmc-hvdc系统交流侧故障示意图中的pcc点交流电压us和交流电流is,结合图3所示的mmc控制系统框图中的相序分离环节,利用式(1)和式(2)将三相电压电流转换至αβ坐标系下的电压分量u
α
、u
β
和电流分量i
α
、i
β
,再利用式(3)至式(6)即可完成αβ坐标系下的正负序分离工作,将pcc点交流电压和交流电流变换至dq轴同步旋转坐标系下。
[0116]
在此基础上,步骤s2具体为:
[0117]
根据式(7)计算出mmc传输的实时有功功率p和实时无功功率q:
[0118][0119]
即将由步骤s1得到的正、负序dq轴电压和电流分量通过式(7)计算得到交流系统不平衡状态下mmc实时传输的有功和无功的功率。
[0120]
其中,在本实施例中,如图3所示,由于mmc的功率外环控制器可分为有功类控制器和无功类控制器,即控制方式也分为有功控制和无功控制,而其中有功控制又包括定有功功率控制和定直流电压控制,无功控制又包括定无功功率控制和定交流电压控制,因此,在计算mmc正序的dq轴电流的指令值前,需要判断mmc功率外环控制器的类型,即上述步骤s3中判断功率外环控制器的类型具体为:
[0121]
判断功率外环控制器的有功类控制方式是定有功功率控制还是定直流电压控制,判断功率外环控制器的无功类控制方式是定无功功率控制还是定交流电压控制。以便后续根据类型计算相应的电流指令值,避免误差和误算。
[0122]
在此基础上,在判断了功率外环控制器的类型之后,便可根据对应的类型选择对应的算式计算得到mmc正序有功功率、无功功率的电流指令值,即步骤s3具体包括以下步骤:
[0123]
s31、判断功率外环控制器的有功类控制方式是定有功功率控制还是定直流电压
控制,若为定有功功率控制,则mmc正序d轴电流指令值的公式如式(8):
[0124][0125]
其中p
ref
为mmc有功功率指令值,k
pp1
和k
ii1
分别为定有功功率控制器的比例系数和积分系数;
[0126]
若为定直流电压控制,则mmc正序d轴电流指令值的公式如式(9):
[0127][0128]
其中为直流电压参考值,u
dc
为直流电压实测值,k
pp2
和k
ii2
分别为定直流电压控制器的比例系数和积分系数;
[0129]
s32、判断功率外环控制器的无功类控制方式是定无功功率控制还是定交流电压控制,若为定无功功率控制,则mmc正序q轴电流指令值的公式如式(10):
[0130][0131]
其中q
ref
为mmc无功功率指令值,k
pp3
和k
ii3
分别为定无功功率控制器的比例系数和积分系数;
[0132]
若为定交流电压控制,则mmc正序q轴电流指令值的公式如式(11):
[0133][0134]
其中为交流电压参考值,u
ac
为交流电压实测值,k
pp4
和k
ii4
分别为定交流电压控制器的比例系数和积分系数。
[0135]
其中,当mmc交流系统发生不对称故障后,负序电流会导致mmc直流电压中存在二倍频分量,因此设计了如图4中的二倍频的陷波器以消除直流电压中二倍频波动分量的影响。
[0136]
其中,步骤s4具体包括以下步骤:
[0137]
s41、根据式(12)对进行变换生成正序dq轴电流指令值式(12)如下:
[0138]
[0139][0140]
其中i
lim
为功率外环控制器的电流限幅值;
[0141]
s42、负序dq轴电流指令值设置为0。
[0142]
即在本实施例中,如图3所示,功率外环控制器生产的正序有功功率和无功功率的电流指令值会经过电流限幅环节,因此需要将其限制在允许的范围内,以避免mmc过电流引发继电保护动作;此外,负序dq轴电流指令值通常设置为0以减小不对称故障发生后系统中产生的负序电流。
[0143]
其中,步骤s5具体包括以下步骤:
[0144]
s51、mmc数学模型如式(13)和(14):
[0145][0146][0147]
其中r和l分别表示mmc所连交流系统等效电阻和电感,ω为交流系统角频率;
[0148]
s52、正负序解耦内环电流控制器的数学模型见如式(15)和(16):
[0149][0150][0151]
其中k
p1
、k
p2
和k
i1
、k
i2
分别为正序dq轴内环电流控制器的比例系数和积分系数,k
p3
、k
p4
和k
i3
、k
i4
分别为负序dq轴内环电流控制器的比例系数和积分系数;
[0152]
s53、mmc输出的正负序电流同正、负序dq轴电流的指令值同正、负序dq轴电流的指令值的传递函数如式(17):
[0153][0154]
即在本实施例中,在功率外环控制器生成的正、负序dq轴电流指令值的基础上,根据图2建立如式(13)和式(14)所示的mmc数学模型,根据图3建立如式(15)和式(16)所示的正负序解耦内环电流控制器的数学模型,最后利用拉普拉斯变换可得到图5中的mmc正负序电流结构控制框图,mmc正负序电流可独立对电流指令值做出响应,从而建立了mmc正负序电流同正、负序dq轴电流指令值的直接量化关系,即式(17)的传递函数。
[0155]
然后对mmc的正负序电流进行反帕克变换,即步骤s6具体为:
[0156]
根据式(18)计算mmc馈入至短路点的短路电流:
[0157][0158]
其中ia、ib和ic即为短路电流。
[0159]
在本实施例中,通过式(18)对mmc的正负序电流进行反帕克变换,从而得到mmc馈入至短路点的短路电流。
[0160]
其中,本实施例基于图2所示的双端mmc模型进行pcc点单相接地故障的仿真验证,图6为mmc交流侧近端不对称故障短路电流计算流程框图,图7为mmc阀侧与网侧短路电流仿真曲线对比图,表1为本发明理论计算方法同仿真结果的比较,由图7与表1中可以看出,本发明可以准确计算出mmc近端交流侧发生不对称故障时mmc馈入pcc点的短路电流,为研究mmc交流系统故障特性提供了理论依据,进而为mmc控制器参数整定、交流系统继电保护参数整定提供了参考。
[0161]
表1:
[0162][0163]
综上所述,本发明提供的一种mmc交流侧近端不对称故障短路电流计算方法,具有以下有益效果:
[0164]
1、在mmc近端交流侧发生不对称故障时,可以准确计算mmc馈入至pcc点的短路电流大小,为研究mmc交流系统故障特性提供理论依据,进而为mmc控制器参数整定、交流系统继电保护参数整定提供了参考。
[0165]
2、所提计算方法可用于分析mmc近端交流侧发生不对称故障后,mmc传输的有功功率和无功功率特性。
[0166]
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等同变换,或直接或间接运用在相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。