技术特征:
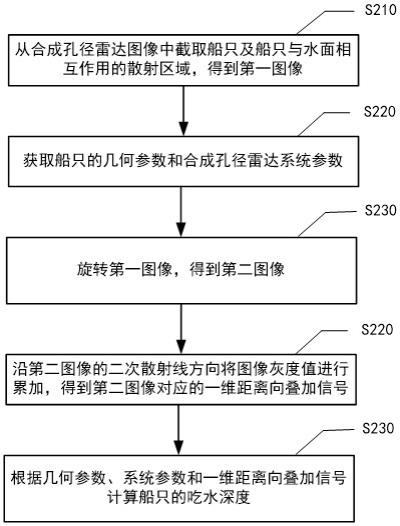
1.一种船只吃水深度计算方法,其特征在于,包括:从合成孔径雷达图像中截取船只及所述船只与水面相互作用的散射区域,得到第一图像;获取所述船只的几何参数和合成孔径雷达的系统参数;旋转所述第一图像,得到第二图像;沿所述第二图像的二次散射线方向将图像灰度值进行累加,得到所述第二图像对应的一维距离向叠加信号;根据所述几何参数、所述系统参数和所述一维距离向叠加信号计算所述船只的吃水深度。2.根据权利要求1所述的船只吃水深度计算方法,其特征在于,所述获取所述船只的几何参数和合成孔径雷达的系统参数包括:获取所述船只的船舷高度和船体倾角,并从所述第一图像中提取所述船只的船只朝向角,其中,所述船舷高度、所述船体倾角和所述船只朝向角为所述几何参数;获取所述合成孔径雷达的轨道倾角和波束中心入射角度,作为所述系统参数。3.根据权利要求2所述的船只吃水深度计算方法,其特征在于,所述旋转所述第一图像,得到第二图像包括:根据所述轨道倾角和所述船只朝向角计算旋转矩阵;利用所述旋转矩阵对所述第一图像进行旋转,得到所述第二图像。4.根据权利要求3所述的船只吃水深度计算方法,其特征在于,根据所述轨道倾角和所述船只朝向角计算旋转矩阵包括:根据公式:计算所述旋转矩阵t,其中,δ为所述合成孔径雷达的轨道倾角,α为所述船只的船只朝向角。5.根据权利要求2所述的船只吃水深度计算方法,其特征在于,所述根据所述几何参数、所述系统参数和所述一维距离向叠加信号计算所述船只的吃水深度包括:获取所述一维距离向叠加信号中两个峰值区域之间的距离;获取所述两个峰值区域中距离向较远的峰值区域的主瓣宽度;根据所述几何参数、所述系统参数、所述两个峰值区域之间的距离、所述主瓣宽度和所述波束中心入射角度计算所述船只的吃水深度。6.根据权利要求5所述的船只吃水深度计算方法,其特征在于,所述根据所述几何参数、所述两个峰值区域之间的距离、所述主瓣宽度和所述波束中心入射角度计算所述船只的吃水深度包括:根据计算所述船只的吃水深度h,其中,h为所述船只的船舷高度,β为所述船只的船体倾角,
l为所述一维距离向叠加信号中两个峰值区域之间的距离,w为所述一维距离向叠加信号中距离向最远的主瓣宽度,θ为所述合成孔径雷达的波束中心入射角度。7.一种船只吃水深度计算装置,包括:图像获取模块,用于从合成孔径雷达图像中截取船只及所述船只与水面相互作用的散射区域,得到第一图像;参数获取模块,用于获取所述船只的几何参数和合成孔径雷达的系统参数;图像旋转模块,用于旋转所述第一图像,得到第二图像;叠加模块,用于沿所述第二图像的二次散射线方向将图像灰度值进行累加,得到所述第二图像对应的一维距离向叠加信号;计算模块,根据所述几何参数、所述系统参数和所述一维距离向叠加信号计算所述船只的吃水深度。8.一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器执行根据权利要求1~6中任一项所述的方法。9.一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器执行根据权利要求1~6中任一项所述的方法。10.一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现根据权利要求1~6中任一项所述的方法。
技术总结
本公开提供了一种船只吃水深度计算方法,包括:从合成孔径雷达图像中截取船只及所述船只与水面相互作用的散射区域,得到第一图像;获取所述船只的几何参数和合成孔径雷达的系统参数;旋转所述第一图像,得到第二图像;沿所述第二图像的二次散射线方向将图像灰度值进行累加,得到所述第二图像对应的一维距离向叠加信号;根据所述几何参数、所述系统参数和所述一维距离向叠加信号计算所述船只的吃水深度。度。度。
技术研发人员:张月婷 郭嘉逸 李芳芳 胡玉新
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:2022.03.02
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。