技术特征:
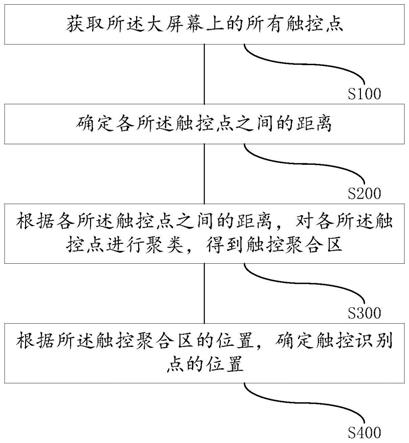
1.一种多触控点识别方法,应用于大屏幕中,其特征在于,所述方法包括:获取所述大屏幕上的所有触控点;确定各所述触控点之间的距离;根据各所述触控点之间的距离,对各所述触控点进行聚类,得到触控聚合区;根据所述触控聚合区的位置,确定触控识别点的位置。2.根据权利要求1所述的多触控点识别方法,其特征在于,所述获取所述大屏幕上的所有触控点,具体包括:采集所述大屏幕上各点位的触控特征值,生成触控梯度图像;将所述触控梯度图像中各点位的触控特征值二值化,得到目标二值图像;将所述目标二值图像中触控特征值为第一目标值的点位作为所述触控点。3.根据权利要求2所述的多触控点识别方法,其特征在于,所述将所述触控图像中各点位的触控特征值二值化,得到目标二值图像,具体包括:根据初始阈值对触控梯度图像中各点位的触控特征值进行阈值处理,得到过渡二值图像;选取过渡二值图像中触控特征值为第二目标值的点位计算直方图;根据所述直方图进行大津二值化处理,得到目标二值图像。4.根据权利要求3所述的多触控点识别方法,其特征在于,所述根据所述直方图进行大津二值化处理,得到目标二值图像,具体包括:根据所述直方图进行大津法计算得到大津阈值;根据所述大津阈值对所述过渡二值图像进行二值化处理,得到目标二值图像。5.根据权利要求1所述的多触控点识别方法,其特征在于,所述根据各所述触控点之间的距离,对各所述触控点进行聚类,得到触控聚合区,具体包括:根据各所述触控点之间的距离,基于密度直达距离,对各所述触控点进行聚类,得到直达聚合区;确定各直达聚合区之间的距离;根据各所述直达聚合区之间的距离,基于密度相连距离,对各所述直达聚合区进行合并,得到触控聚合区。6.根据权利要求5所述的多触控点识别方法,其特征在于,所述根据各所述触控点之间的距离,基于密度直达距离,对各所述触控点进行聚类,得到直达聚合区,具体包括:将两个距离小于所述密度直达距离的触控点判断为互为密度直达点,将所有互为密度直达点的触控点聚合在一起,形成密度直达区;根据各所述触控点的触控特征值将所述密度直达区分割为多个直达聚合区。7.根据权利要求5所述的多触控点识别方法,其特征在于,所述根据所述触控点的触控特征值将所述密度直达区分割为多个密度直达区,得到直达聚合区,具体包括:根据各所述触控特征值在所述密度直达区中选取核心点;选取与所述核心点密度直达的触控点;从所述密度直达区中分离出所述核心点与所述触控点形成的直达聚合区,得到剩余的密度直达区;继续对所述剩余的密度直达区进行分离,直至所述密度直达区被分割为多个直达聚合
区。8.根据权利要求7所述的多触控点识别方法,其特征在于,所述根据各所述直达聚合区之间的距离,基于密度相连距离,对各所述直达聚合区进行合并,得到触控聚合区,具体包括:确定各所述直达聚合区的核心点之间的距离,作为各所述直达聚合区之间的距离;若两所述直达聚合区之间的距离小于预定合并阈值,则将两所述直达聚合区合并。9.一种多触控点识别装置,其特征在于,包括:获取模块,用于获取所述大屏幕上的所有触控点;距离模块,用于确定各所述触控点之间的距离;聚合模块,用于根据各所述触控点之间的距离,对各所述触控点进行聚类,得到触控聚合区;识别模块,用于根据所述触控聚合区的位置,确定触控识别点的位置。10.一种计算机可读介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的多触控点识别方法。11.一种电子设备,其特征在于,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如权利要求1至8中任一项所述的多触控点识别方法。
技术总结
本申请的实施例提供了一种多触控点识别方法、装置、计算机可读介质及电子设备。该多触控点识别方法包括:获取所述大屏幕上的所有触控点;确定各所述触控点之间的距离;根据各所述触控点之间的距离,对各所述触控点进行聚类,得到触控聚合区;根据所述触控聚合区的位置,确定触控识别点的位置。本申请的技术方案对于离散性较大的噪声点具有较好的降噪效果,解决了现有技术中对触控点的识别过于死板,对离散性较大的点位降噪效果差的问题。离散性较大的点位降噪效果差的问题。离散性较大的点位降噪效果差的问题。
技术研发人员:符采灵
受保护的技术使用者:TCL华星光电技术有限公司
技术研发日:2021.12.02
技术公布日:2022/3/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。