技术特征:
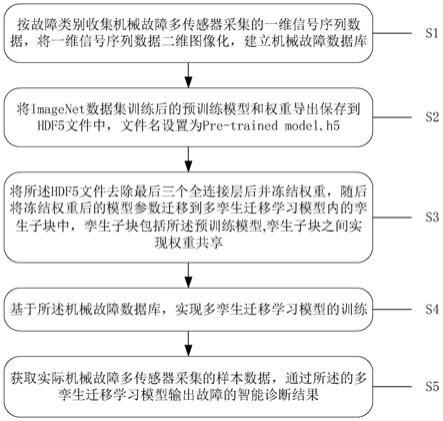
1.一种多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,该方法具体包括如下步骤:s1)按机械故障具体类别收集多传感器采集的一维信号序列数据,将一维信号序列数据二维图像化,建立机械故障数据库,所述机械故障数据库由若干个成对的二维图像化数据和故障类别标签组成;s2)将imagenet数据集训练后的预训练模型及其权重导出保存到hdf5文件中,文件名设置为pre-trained model.h5;s3)将所述hdf5文件去除最后三个全连接层后并冻结权重,命名为pre-trained model without fc,随后将冻结权重后的模型参数迁移到多孪生迁移学习模型内的各孪生子块中,孪生子块包括所述预训练模型,孪生子块之间实现权重共享;s4)基于所述机械故障数据库,实现多孪生迁移学习模型的训练,待模型收敛后,得到训练后的多孪生迁移学习模型,此时得到的网络模型和权重文件被保存为multi-twin tl model.h5;s5)获取实际机械故障多传感器采集的样本数据,通过所述训练后的多孪生迁移学习模型输出机械故障的智能诊断结果;其中,所述多孪生迁移学习模型的输入个数为n,n也对应着传感器和孪生子块的个数,所述多孪生迁移学习模型的输出为机械故障预测类别,所述多孪生迁移学习模型中的每个孪生子块被看作一个特征提取器,每个孪生子块的输入为对应一个传感器采集的信号,每个孪生子块内部包含冻结权重的pre-trained model without fc、一个flatten层和两个全连接层fc1和fc2,n个孪生子块之间实现权重共享,随后将n个孪生子块的输出信息通过concat层实现合并,最后经过一个全连接层fc3和一个softmax层得到机械故障的预测类别,即机械故障的智能诊断结果。2.根据权利要求1所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,所述机械故障包括:轴承故障、齿轮故障、转子故障中的至少一种。3.根据权利要求2所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,所述多传感器包括安装位置不同的传感器和类型不同的传感器中的至少一种,其中,安装位置不同的传感器包括:位于驱动端的传感器、位于风扇段的传感器、位于基座位置的传感器中的至少一类;类型不同的传感器包括:位移传感器、速度传感器、加速度传感器、声音信号传感器中的至少一类;所述多传感器的个数至少为2。4.根据权利要求3所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,将一维信号序列数据二维图像化的方式包括:直接将一维信号重新排列为二维矩阵、格拉姆角场变换、马尔可夫变迁场变换、递归图变换、短时傅里叶变换的一种。5.根据权利要求4所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,所述预训练模型包括:vgg16网络模型、resnet网络模型、mobilenet网络模型和inceptionv3网络模型中的其中一个。6.根据权利要求5所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,所述孪生子块包括faltten层和全连接层中的至少一类。7.根据权利要求6所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,所述机械故障数据库中包括5种故障轴承状态的样本数据,分别为内圈故障、滚动
体故障、中心位置为3点钟的外圈故障、中心位置为6点钟的外圈故障和中心位置为12点钟的外圈故障。8.根据权利要求7所述的多孪生迁移学习融合多信息的机械故障智能诊断方法,其特征在于,所述n=3,此时对应的多传感器分别为驱动端加速度传感器、风扇端加速度传感器、基座加速度传感器。
技术总结
本发明公开了一种多孪生迁移学习融合多信息的机械故障智能诊断方法,该方法通过采集多传感器机械故障样本数据,以及对所述故障样本数据进行分类,根据分类后的故障样本数据建立数据库,对数据库进行划分,通过多孪生迁移学习模型对划分后的训练集进行训练,得到网络模型和权重文件,将所述网络模型和权重文件应用于测试模型,输出机械故障的智能诊断结果。该方法能够克服标签数据少、单一传感器容错力低、模型空间复杂度高等问题,可将ImageNet数据集域得到的预训练模型的权重参数,并应用于机械故障诊断领域,从多个传感器实现机械故障有效的智能诊断。有效的智能诊断。有效的智能诊断。
技术研发人员:刘治汶 郝亮 张烁
受保护的技术使用者:电子科技大学
技术研发日:2021.11.16
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。