1.本发明涉及手术器械领域,具体涉及一种腹腔镜下多自由度高精度微操作多功能手术钳。
背景技术:
2.腹腔镜手术是未来手术发展的一个必然趋势。所谓腹腔镜手术就是在患者腹部的不同部位做数个小切口,通过这些小切口插入摄像镜头和各种特殊的手术器械,将插入腹腔内的摄像头所拍摄的腹腔内各种脏器的图像传输到电视屏幕上,外科医生通过观察图像,用各种手术器械在体外进行操作来完成手术。腹腔镜手术具有如下优点:手术创伤小、病人术后恢复快、住院时间短、病人术后疼痛轻、腹部切口瘢痕小,美观、治疗效果与开腹手术相同。这使得许多过去的开放性手术现在已被腹腔镜手术取代,大大增加了手术选择机会。
3.在腹腔镜手术,现有的腹腔镜手术钳往往存在如下弊端:
①
可操作性有限,主要依赖医生手腕调整手术钳前端的钳体的摆动角度及旋转角度,或采用有限的电驱动实现单一且有限的自由度调整,还存在难以达到病灶并且对需要处理的病灶组织不能精准的夹持的情况,进而导致不能选择腹腔镜手术而需要开腹手术;
②
夹持力度不均,主要依赖机械结构将医生的手部操作力传递至手术钳前端的钳体,会因操作姿势和随着手术时间的增加而产生变化,增加医生操作负担的同时减少患者伤害;
③
功能单一,手术钳一般只具有单一功能,即钳体所具有的功能,在手术过程中往往需要其他手术器械进行配合,难免需要频繁更换手术器械,导致手术时长增加,增加患者痛苦,此外,不同的医生因其经验差异不同对手术进度也会产生一定影响。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种由电动控制钳体实现高精度方位调整、集成其他功能模块并可切换使用的腹腔镜下多自由度高精度微操作多功能手术钳,提升手术效果、降低患者痛苦、降低操作人员的经验差异对手术所造成的影响。
5.为实现上述目的,本发明提供了如下技术方案:包括操作手柄和操作头,所述的操作头包括钳体,其特征在于:所述的操作手柄与操作头之间设置有朝向调节装置,所述的朝向调节装置包括第一磁性驱动环、第二磁性驱动环、磁性关节转轴及硅胶层,所述的第一磁性驱动环固定于操作手柄前端,所述的第二磁性驱动环固定于操作头后端,所述的磁性关节转轴两端分别设置有与操作手柄前端及操作头后端的中心球形配合的球形面,所述的硅胶层环绕第一磁性驱动环与第二磁性驱动环并固定于第一磁性驱动环与第二磁性驱动环外周之间,所述的第一磁性驱动环和第二磁性驱动环分别沿周向设置有多个磁条,所述的朝向调节装置具有摆动调节模式及旋转调节模式,所述的摆动调节模式时,第一磁性驱动环与第二磁性驱动环一侧相对的磁条通电吸引,另一侧相对的磁条通电排斥;所述的旋转调节模式,第一磁性驱动环的多个磁条分别与第二磁性驱动环相隔相同周向角度的磁条通
电吸引,所述的操作头设置有功能模块及将功能模块与钳体切换伸出操作头的切换装置。
6.通过采用上述技术方案,一方面,由第一磁性驱动环、第二磁性驱动环、磁性关节转轴及硅胶层所组成的朝向调节装置,具有摆动调节模式及旋转调节模式,使单一调节装置具有两个自由度的调节功能,并采用电控电动的方式驱动,从而获得更精准的方位调节,对病灶组织进行精准处理,提高手术效果,另一方面,操作头在具有钳体外还具有另一功能模块,在钳体工作完成后由切换装置将功能模块进行切换,使功能更为多元化,省去因切换功能需要切换手术器械所带来的不便,提高手术效果,减少患者痛苦,此外,由于各个动作更为精准、统一,也降低操作人员的经验差异对手术所造成的影响。
7.本发明进一步设置为:所述的切换装置包括两个切换座和切换马达,所述的操作头设置有前端具有操作口的收纳腔,所述的收纳腔中部设置有将空间分为两个前后方向的收纳通道的隔板,两个所述的切换座分别位于两个收纳通道并沿收纳通道前后移动,其中一个所述的切换座用于安装钳体,另一个切换座用于安装功能模块,各所述的切换座分别沿前后方向设置有齿条,所述的切换马达固定于收纳腔并驱动设置有驱动齿轮,两个所述的齿条分别与驱动齿轮的两侧啮合,在驱动齿轮旋转时沿不同方向移动。
8.通过采用上述技术方案,由单一马达带动两个齿条反向移动,使其中一个切换座回到收纳通道后另一切换座伸出收纳通道,从而实现钳体与功能模块的切换使用,结构更为精简,切换更为迅速,也合理利用有限的操作头内部空间。
9.本发明进一步设置为:所述的钳体包括两个相对的钳片,所述的切换座两侧分别设置有分别用于安装各钳片的压电片,所述的压电片通入正电压时伸长,钳片向内侧倾斜构成夹持动作;所述的压电片通入负电压时缩短,钳片向外侧倾斜构成分离动作。
10.通过采用上述技术方案,相较传统的机械传动结构,压电片完全由电路进行控制,控制简便、精准,每次夹持动作的力度均保持一致,减少因力度过大对患者的伤害,或力度过小影响夹持稳定性,同时省去复杂的机械结构,为功能拓展提供空间(例如上述的切换装置),使功能更多元化,而且,还可将钳体进一步缩小化。
11.本发明进一步设置为:还包括视觉装置,所述的视觉装置包括两个鱼眼摄像头,所述的操作杆沿径向两侧分别设置有供鱼眼摄像头伸出或收回操作杆的伸缩机构。
12.通过采用上述技术方案,视觉装置是手术情况的视觉补充,由于鱼眼摄像头具有更大的拍摄范围,在体内空间局促的位置能够更好的采集数据,同时为以后简化腹腔镜手术的操作提供可能,配合上述完全电驱的操作结构,视觉装置可作为机器的眼睛,也为全自动机器手术提供可能。在操作杆移动过程中,鱼眼摄像头隐藏于操作杆,到达手术位置后,鱼眼摄像头仅伸出一点即可进行全面数据采集,更具有实用性,数据传输也可多采用无线方式,简化操作杆的内部结构。
13.本发明进一步设置为:所述的操作杆内设置有驱动腔,所述的驱动腔两侧分别设置有延伸至操作杆外侧壁的伸缩通道,所述的伸缩机构包括驱动马达、伸缩座和驱动螺杆,所述的伸缩座移动于伸缩通道并分别用于安装各鱼眼摄像头,所述的驱动螺杆转动设置于驱动腔,所述的驱动螺杆两端分别设置有方向相反的螺纹,各所述的伸缩座分别设置有与驱动螺杆端部螺纹配合并在驱动螺杆旋转时沿伸缩通道移动的螺纹孔,所述的伸缩马达设置于驱动腔内,所述的伸缩马达和驱动螺杆分别设置有构成两者驱动配合的传动齿轮。
14.通过采用上述技术方案,由单一马达带动驱动螺杆旋转,进而使与驱动螺杆两端
螺纹二配合的伸缩腔以相反的方向移动,进而实现两个鱼眼摄像头的同步动作,使驱动结构更为精简,合理利用有限的内部空间。
15.本发明进一步设置为:所述的功能模块为电凝钩。
16.通过采用上述技术方案,可选择腹腔镜下各种各样的功能模块与钳体进行搭配,根据使用频率及与钳体的配合度,优选电凝钩,有效提高手术效率。
附图说明
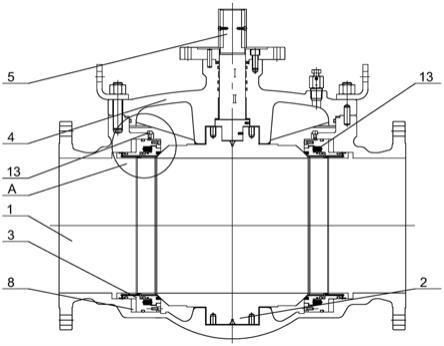
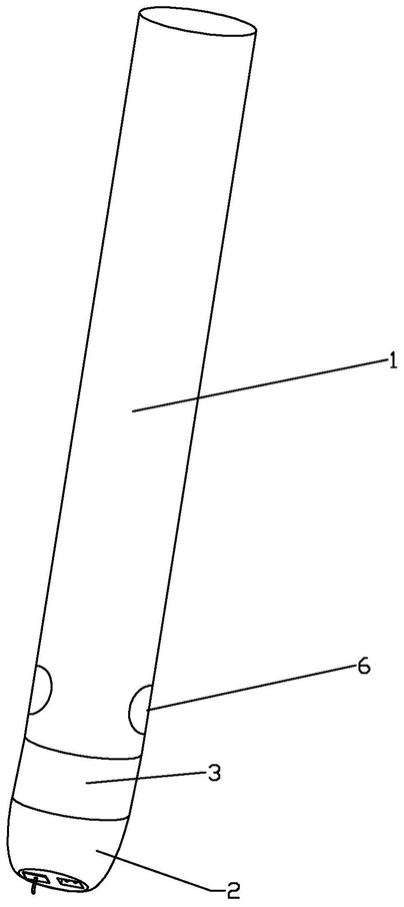
17.图1为本发明具体实施方式的立体图;图2为本发明具体实施方式的结构示意图;图3为图2中a的放大图;图4为本发明具体实施方式中摆动调节模式的原理示意图;图5为本发明具体实施方式中旋转调节模式的原理示意图。
具体实施方式
[0018] 下面将结合附图对本发明的技术方案进行清楚、完整地描述, 显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。 基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0019]
在本发明的描述中,需要说明的是,术语“中心”、“上
”ꢀ
、“下
”ꢀ
、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系, 仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语
ꢀ“
第一”、“第二”、“第三
”ꢀ
仅用于描述目的,而不能理解为指示或暗示相对重要性。
[0020]
如图1—图3所示,本发明公开了一种腹腔镜下多自由度高精度微操作多功能手术钳,包括操作手柄1和操作头2,操作头2包括钳体21,操作手柄1与操作头2之间设置有朝向调节装置3,朝向调节装置3包括第一磁性驱动环31、第二磁性驱动环32、磁性关节转轴33及硅胶层34,第一磁性驱动环31固定于操作手柄前端1,第二磁性驱动环32固定于操作头后端2,磁性关节转轴33两端分别设置有与操作手柄1前端及操作头2后端的中心球形配合的球形面331,硅胶层34环绕第一磁性驱动环31与第二磁性驱动环32并固定于第一磁性驱动环31与第二磁性驱动环32外周,第一磁性驱动环31和第二磁性驱动环32分别沿周向设置有多个磁条311,朝向调节装置3具有摆动调节模式及旋转调节模式,摆动调节模式时,第一磁性驱动环31与第二磁性驱动环32一侧相对的磁条311通电吸引,另一侧相对的磁条311通电排斥;旋转调节模式,第一磁性驱动环31的多个磁条311分别与第二磁性驱动环32相隔相同周向角度的磁条311通电吸引,操作头2设置有功能模块22及将功能模块22与钳体21切换伸出操作头2的切换装置4,一方面,由第一磁性驱动环31、第二磁性驱动环32、磁性关节转轴33及硅胶层34所组成的朝向调节装置3,具有摆动调节模式及旋转调节模式,使单一调节装置具有两个自由度的调节功能,并采用电控电动的方式驱动,从而获得更精准的方位调节,对病灶组织进行精准处理,提高手术效果,另一方面,操作头2在具有钳体21外还具有另一功能模块22,在钳体21工作完成后由切换装置4将功能模块22进行切换,使功能更为多元化,
省去因切换功能需要切换手术器械所带来的不便,提高手术效果,减少患者痛苦,此外,由于各个动作更为精准、统一,也降低操作人员的经验差异对手术所造成的影响。
[0021]
切换装置4包括两个切换座41和切换马达42,操作头2设置有前端具有操作口51的收纳腔5,收纳腔5中部设置有将空间分为两个前后方向的收纳通道52的隔板53,两个切换座41分别位于两个收纳通道52并沿收纳通道52前后移动,其中一个切换座41用于安装钳体21,另一个切换座41用于安装功能模块22,各切换座41分别沿前后方向设置有齿条411,切换马达42固定于收纳腔5并驱动设置有驱动齿轮421,两个齿条411分别与驱动齿轮421的两侧啮合,在驱动齿轮421旋转时沿不同方向移动,由单一马达带动两个齿条411反向移动,使其中一个切换座41回到收纳通道52后另一切换座41伸出收纳通道52,从而实现钳体21与功能模块22的切换使用,结构更为精简,切换更为迅速,也合理利用有限的操作头2内部空间。
[0022]
钳体21包括两个相对的钳片211,切换座41两侧分别设置有分别用于安装各钳片211的压电片212,压电片212通入正电压时伸长,钳片211向内侧倾斜构成夹持动作;压电片212通入负电压时缩短,钳片211向外侧倾斜构成分离动作,相较传统的机械传动结构,压电片212完全由电路进行控制,控制简便、精准,每次夹持动作的力度均保持一致,减少因力度过大对患者的伤害,或力度过小影响夹持稳定性,同时省去复杂的机械结构,为功能拓展提供空间(例如上述的切换装置4),使功能更多元化,而且,还可将钳体21进一步缩小化。
[0023]
还包括视觉装置6,视觉装置6包括两个鱼眼摄像头61,操作杆沿径向两侧分别设置有供鱼眼摄像头61伸出或收回操作杆的伸缩机构,视觉装置6是手术情况的视觉补充,由于鱼眼摄像头61具有更大的拍摄范围,在体内空间局促的位置能够更好的采集数据,同时为以后简化腹腔镜手术的操作提供可能,配合上述完全电驱的操作结构,视觉装置6可作为机器的眼睛,也为全自动机器手术提供可能。在操作杆移动过程中,鱼眼摄像头61隐藏于操作杆,到达手术位置后,鱼眼摄像头61仅伸出一点即可进行全面数据采集,更具有实用性,数据传输也可多采用无线方式,简化操作杆的内部结构。
[0024]
操作杆内设置有驱动腔62,驱动腔62两侧分别设置有延伸至操作杆外侧壁的伸缩通道63,伸缩机构包括驱动马达64、伸缩座65和驱动螺杆66,伸缩座65移动于伸缩通道63并分别用于安装各鱼眼摄像头61,驱动螺杆66转动设置于驱动腔62,驱动螺杆66两端分别设置有方向相反的螺纹,各伸缩座65分别设置有与驱动螺杆66端部螺纹配合并在驱动螺杆66旋转时沿伸缩通道63移动的螺纹孔651,伸缩马达设置于驱动腔62内,伸缩马达和驱动螺杆66分别设置有构成两者驱动配合的传动齿轮,由单一马达带动驱动螺杆66旋转,进而使与驱动螺杆66两端螺纹二配合的伸缩腔以相反的方向移动,进而实现两个鱼眼摄像头61的同步动作,使驱动结构更为精简,合理利用有限的内部空间。
[0025]
功能模块22为电凝钩,可选择腹腔镜下各种各样的功能模块22与钳体21进行搭配,根据使用频率及与钳体21的配合度,优选电凝钩,有效提高手术效率。
[0026]
如图4所示,配合附图阐述摆动调节模式,需要调节摆动角度β时,第一磁性驱动环31与第二磁性驱动环32一侧相对的磁条311通电吸引,另一侧相对的磁条311通电排斥,即c、d相吸引,d靠近c,a、b相排斥,b远离a,从而使第二磁性驱动环32倾斜形成竖向摆动,即摆动调节。
[0027]
如图5所示,配合附图阐述旋转调节模式,需要调节周向角度α时,第一磁性驱动环31的多个(2个)磁条311(a、c)分别与第二磁性驱动环32相隔相同周向角度的磁条311(b、d)
通电吸引,即相吸引的a与b周向角度为α,相吸引的c与d周向角度为α,通电吸引后,b向a移动直至对应,d向c移动直至相对,从而完成第二磁性驱动环32周向旋转,即旋转调节。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。