1.本发明属于电力电子控制技术领域,尤其涉及一种基于分数阶的三电平逆变器多指标协同控制方法及系统。
背景技术:
2.本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
3.三电平逆变器拓扑具有输出电压高,电流谐波小等优点,使其在高压大功率交流电机领域得到广泛应用。然而,三电平逆变器中性点电压不平衡和交流测输出电流跟踪速度慢的问题对系统仍有不利影响。正常情况下,三电平逆变器各开关电压占直流电压的一半,但由于不同的调制策略或者干扰信号干扰,流入中性点的平均电流不稳定,导致中性点电压不平衡,有可能增加低次谐波含量或者损坏开关器件。
4.目前,广泛使用的三电平逆变器控制策略是把控制算法和脉宽调制算法相结合,其中调制算法包括正弦波脉宽调制(spwm)、电压空间矢量脉宽调制(svpwm)和特定谐波消除脉宽调制(shepwm)。由于svpwm具有直流电压利用率高、谐波含量低等优点,因此其应用最为广泛,虽然取得了良好的效果但发明人发现,svpwm控制方法也存在控制精度、开关损耗、算法复杂等方面的问题。与此同时,传统的控制算法也存在着自适应性、鲁棒性和动态性能等方面的问题,无法实现中点电压误差、跟踪电流时间、电流谐波的高效协同控制。
技术实现要素:
5.为了解决上述背景技术中存在的技术问题,本发明提供一种基于分数阶的三电平逆变器多指标协同控制方法及系统,其能够将分数阶pi控制算法和空间矢量脉宽调制算法(svpwm)相结合来实现三电平逆变器中点电压误差、跟踪电流时间和电流谐波的协同控制。
6.为了实现上述目的,本发明采用如下技术方案:
7.本发明的第一个方面提供了一种基于分数阶的三电平逆变器多指标协同控制方法,其包括:
8.获取直流侧电压差,并将其与期望中点电压比较,得到中点电压误差值;
9.将中点电压误差值经基于平相的分数阶pi控制算法处理,得到中间变量;
10.将所述中间变量作为小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
11.进一步地,所述基于平相的分数阶pi控制算法表示为:
[0012][0013]
其中,gc(s)表示基于平相的分数阶pi控制算法所对应的控制器的传递函数;k
p
是比例系数,ki是积分系数,λ是积分阶次。
[0014]
进一步地,所述中间变量设为x:
[0015][0016]
其中,δu为直流侧电压差;k
p
、ki和λ分别是积分基于平相的分数阶pi控制算法中的比例系数、积分系数和积分阶次。
[0017]
进一步地,所述空间矢量脉宽调制算法依次经过矢量选择、驻留时间计算和开关序列设定之后形成调制波形。
[0018]
进一步地,在所述空间矢量脉宽调制算法中,以大矢量为划分界限,电压矢量空间按逆时针划分为6个区域。
[0019]
进一步地,在所述空间矢量脉宽调制算法中,p型小矢量起到减小直流侧电压差的作用;n型小矢量起到增大直流侧电压差的作用。
[0020]
本发明的第二个方面提供了一种基于分数阶的三电平逆变器多指标协同控制系统,其包括:
[0021]
中点电压误差值计算模块,其用于获取直流侧电压差,并将其与期望中点电压比较,得到中点电压误差值;
[0022]
平相分数阶pi控制模块,其用于将中点电压误差值经基于平相的分数阶pi控制算法处理,得到中间变量;
[0023]
空间矢量脉宽调制模块,其用于将所述中间变量作为小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
[0024]
进一步地,在所述平相分数阶pi控制模块中,所述中间变量设为x:
[0025][0026]
其中,δu为直流侧电压差;k
p
、ki和λ分别是积分基于平相的分数阶pi控制算法中的比例系数、积分系数和积分阶次。
[0027]
本发明的第三个方面提供了一种基于分数阶的三电平逆变器多指标协同控制系统,其包括:
[0028]
电压采集模块,其用于采集直流侧电压;
[0029]
信号比较模块,其用于将采集的直流侧电压与期望中点电压比较,得到中点电压误差值;
[0030]
平相分数阶pi控制器,其用于将中点电压误差值经基于平相的分数阶pi控制算法处理,得到中间变量;
[0031]
空间矢量脉宽调制器,其用于将所述中间变量作为小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
[0032]
进一步地,在所述平相分数阶pi控制器中,所述中间变量设为x:
[0033]
[0034]
其中,δu为直流侧电压差;k
p
、ki和λ分别是积分基于平相的分数阶pi控制算法中的比例系数、积分系数和积分阶次。
[0035]
与现有技术相比,本发明的有益效果是:
[0036]
本发明通过将分数阶pi控制算法和空间矢量脉宽调制算法(svpwm)相结合,利用基于平相的分数阶pi控制算法处理中点电压误差值,得到小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现了三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
[0037]
本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
[0038]
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
[0039]
图1是本发明实施例的基于平相的分数阶控制系统伯德图;
[0040]
图2(a)是pid控制范围;
[0041]
图2(b)是分数阶pid控制范围;
[0042]
图3是本发明实施例的平相分数阶控制器的开环伯德图;
[0043]
图4(a)是钳位电容值增大5%时的穿越频率和相位裕度;
[0044]
图4(b)是钳位电容值减小5%时的穿越频率和相位裕度;
[0045]
图4(c)是svpwm环节的比例增益k
svpwm
增大5%时的穿越频率和相位裕度;
[0046]
图4(d)是svpwm环节的比例增益k
svpwm
减小5%时的穿越频率和相位裕度;
[0047]
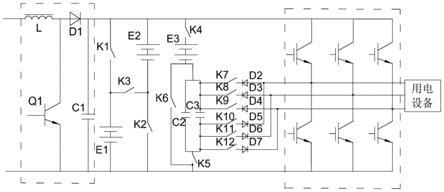
图5是本发明实施例的三电平逆变器主电路图;
[0048]
图6是本发明实施例的电压空间矢量图;
[0049]
图7(a)是矢量[npn]对中点电压的影响;
[0050]
图7(b)是矢量[ooo]对中点电压的影响;
[0051]
图7(c)是矢量[oop]对中点电压的影响;
[0052]
图7(d)是矢量[oon]对中点电压的影响;
[0053]
图8是本发明实施例的三电平逆变器控制原理框图;
[0054]
图9是本发明实施例的闭环控制系统;
[0055]
图10是v
p
》vn时的开关序列;
[0056]
图11是v
p
《vn时的开关序列;
[0057]
图12是整数阶和分数阶系统关于中点电压控制性能的对比;
[0058]
图13是k
p
为2.375时整数阶控制器的中点电压和输出电流控制效果;
[0059]
图14是k
p
为12.6时分数阶控制器的中点电压和输出电流控制效果;
[0060]
图15是k
p
为2.675时整数阶控制器的中点电压和输出电流控制效果;
[0061]
图16是k
p
为12.9时分数阶控制器的中点电压和输出电流控制效果;
[0062]
图17是k
p
为2.975时整数阶控制器的中点电压和输出电流控制效果;
[0063]
图18是k
p
为13.2时分数阶控制器的中点电压和输出电流控制效果;
[0064]
图19是分数阶和整数阶控制器在中点电压和输出电流方面的控制效果对比。
具体实施方式
[0065]
下面结合附图与实施例对本发明作进一步说明。
[0066]
应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
[0067]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
[0068]
实施例一
[0069]
参照图8,本实施例提供了一种基于分数阶的三电平逆变器多指标协同控制方法,其包括:
[0070]
步骤1:获取直流侧电压差,并将其与期望中点电压比较,得到中点电压误差值;
[0071]
步骤2:将中点电压误差值经基于平相的分数阶pi控制算法处理,得到中间变量;
[0072]
由于传统控制算法在自适应性、鲁棒性等方面存在不足,影响三电平逆变器中点电压平衡、电流跟踪时间和电流谐波的协同控制,因此本实施例提出基于平相的分数阶pi控制算法。如图2(a)和图2(b)所示,分数阶pid控制器极大的增加了控制精度,将传统控制器的控制范围由离散点扩展到整个平面。
[0073]
在本实施例中,所述基于平相的分数阶pi控制算法表示为:
[0074][0075]
其中,gc(s)表示基于平相的分数阶pi控制算法所对应的控制器的传递函数;k
p
是比例系数,ki是积分系数,λ是积分阶次。
[0076]
pid控制算法所对应的系数的整定规则大都是在频域中实现的,其中穿越频率和相位裕度能反映动态性能和稳定性,因此使用较为广泛。但当系统受到噪声或干扰时,相位裕度波动较大,系统稳定性较差,上述整定规则不能实现设计目标。
[0077]
为了解决这一问题,本发明引入了平相,实现了开环传递函数g
op
(jω)的相频曲线在穿越频率上保持水平。如图1所示,当系统受到干扰时,相位裕度只在很小的范围内波动,从而大大提高了系统的自适应性、鲁棒性和稳定性。
[0078]
平相的传统整定规则要求相位曲线在穿越频率ωc的导数为0,可以表示为:
[0079][0080]
由于相位函数求导的复杂性,下面提出了改进的整定规则简化此算法,具体实现过程如下所示。
[0081]
开环传递函数的导数可以表示为:
[0082]
[0083]
将传统实现公式代入上式可得:
[0084][0085]
因此改进的实现算法可推导为:
[0086][0087]
综上所述,本实施例的pi控制算法所对应的控制器参数整定规则总结如下:
[0088]
|g
op
(jωc)|=1
[0089]
∠g
op
(jωc) π=φ
[0090][0091]
其中,φ为角度参数。
[0092]
本实施例的基于平相的pi控制算法的参数整定算法对此控制器参数进行分析计算,结果如下:
[0093][0094]
经过验证,如图3和图4(a)-图4(d)所示,控制系统具备良好的自适应性和鲁棒性。本实施例将平相约束引入分数阶pi控制器(fopi)的参数整定中,使开环传递函数的相频响应曲线在穿越频率处保持水平,当系统收到干扰时相位裕度仅在很小的范围内波动,从而在很大程度上提高了自适应性,鲁棒性和动态性能。
[0095]
其中,所述中间变量设为x:
[0096][0097]
其中,δu为直流侧电压差;k
p
、ki和λ分别是积分基于平相的分数阶pi控制算法中的比例系数、积分系数和积分阶次。
[0098]
步骤3:将所述中间变量作为小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
[0099]
基于小矢量的svpwm对钳位电容电压的调节作用是揭开控制盲区的关键,分数阶技术能实现更好的自适应性和鲁棒性,实现中点电压误差、电流跟踪时间以及电流谐波的多指标协同控制,因此将分数阶技术和svpwm结合,建立了分数阶闭环控制系统模型,利用
上述基于平相的pi控制算法和电压小矢量调整钳位电容电压来实现中点平衡,进而实现多指标协同控制。
[0100]
三电平npc逆变器如图5所示,其中钳位电容电压v
p
和中点电压vn可表示为:
[0101][0102][0103][0104]
其中,i
p
是流经p电容的电流,in是流经n电容的电流,i
neutral
是流经逆变器中性点的电流。c为p电容和n电容的电容值。
[0105]
svpwm的开关状态和输出电压可表示为:
[0106][0107][0108]
如图6所示,在三电平逆变器中有27种开关状态,[pnn]等是大矢量,[pon]等是中适量,[poo]等是小矢量,[ooo]是零矢量。以大矢量为划分界限,电压矢量空间按逆时针划分为6个区域。
[0109]
在具体实施中,所述空间矢量脉宽调制算法依次经过矢量选择、驻留时间计算和开关序列设定之后形成调制波形。
[0110]
在所述空间矢量脉宽调制算法中,p型小矢量起到减小直流侧电压差的作用;n型小矢量起到增大直流侧电压差的作用。
[0111]
大中小零矢量对中点电压的影响分析如下:
[0112]
由于中矢量对中点电压的影响是不可控制的,故在此不做分析。如图7(a)所示,由于不与三电平逆变器中性点相连,因此大矢量不对中点平衡造成影响;图7(b)中,由于流经中点的电流为0,因此零矢量不对重点平衡造成影响;图7(c)中,ia ib反向流经v
p
,p型小矢量起到减小δu=v
p-vn的作用;在图7(d)中,ia ib反向流经vn,n型小矢量起到增大δu=v
p-vn的作用。其中,ia和ib分别为a相和b相电流。
[0113]
三电平逆变器控制多指标协同控制如图8,闭环系统模型如图9所示,因此开环传递函数可以表示为:
[0114]
[0115]
其中,k
svpwm
和ts是svpwm环节的比例增益和时间常数,k
delay
是控制系统的延迟时间。
[0116]
闭环传递函数可以表示为:
[0117][0118]
当参考电压处于如图6所示位置并且v
p
》vn时,选择p型小矢量来减小v
p
,开关序列如图10所示,大中小零矢量的关系可以表示为:
[0119][0120]
当参考电压处于如图6所示位置并且v
p
《vn时,选择n型小矢量来减小vn,开关序列如图11所示,大中小零矢量的关系可以表示为:
[0121][0122]
下面给出典型的实例验证上述理论和方法的正确性:
[0123]
仿真参数选择如下表
[0124][0125]
三电平逆变器中点电压控制:
[0126]
如图12所示,分数阶控制算法在中点电压平衡恢复时间的性能方面明显优于整数阶控制算法。三电平逆变器中点电压误差、电流跟踪时间、电流谐波的高效协同控制和自适应性鲁棒性验证。
[0127]
整数阶控制器和分数阶控制器的电流跟踪时间和中点电压误差如图13和图14所示。图13给出了k
p
为2.375时整数阶控制器的中点电压和输出电流控制效果;图14给出了k
p
为12.6时分数阶控制器的中点电压和输出电流控制效果。
[0128]
图15给出了k
p
为2.675时整数阶控制器的中点电压和输出电流控制效果,图16给出了k
p
为12.9时分数阶控制器的中点电压和输出电流控制效果,图17给出了k
p
为2.975时整数阶控制器的中点电压和输出电流控制效果,图18给出了k
p
为13.2时分数阶控制器的中点电压和输出电流控制效果。从图15-图18可看出,本实施例的该协同控制方法实现中点电压控制误差、电流跟踪时间和谐波的协同优化。在整数阶控制器中,随着电流跟踪时间从50ms减小到40ms,中点电压误差从3v增大到6v,并且电流谐波加剧,自适应性鲁棒性差。
[0129]
分数阶控制器实现了中点电压误差、电流跟踪时间、电流谐波的同时优化协同控制,控制器具有更优的自适应鲁棒性能,如图19所示。试验证明分数阶控制器在实现三电平逆变器多指标协同控制和自适应性鲁棒性方面的优越性。自上往下第一条曲线表示整数阶控制器的电流跟踪时间,第二条曲线是分数阶控制器的电流跟踪时间,第三条曲线是整数阶控制器的中点电压误差,第四条曲线是分数阶控制器的中点电压误差。
[0130]
实施例二
[0131]
本实施例提供了一种基于分数阶的三电平逆变器多指标协同控制系统,其包括:
[0132]
中点电压误差值计算模块,其用于获取直流侧电压差,并将其与期望中点电压比较,得到中点电压误差值;
[0133]
平相分数阶pi控制模块,其用于将中点电压误差值经基于平相的分数阶pi控制算法处理,得到中间变量;
[0134]
空间矢量脉宽调制模块,其用于将所述中间变量作为小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
[0135]
在具体实施中,在所述平相分数阶pi控制模块中,所述中间变量设为x:
[0136][0137]
其中,δu为直流侧电压差;k
p
、ki和λ分别是积分基于平相的分数阶pi控制算法中的比例系数、积分系数和积分阶次。
[0138]
实施例三
[0139]
本实施例提供了一种基于分数阶的三电平逆变器多指标协同控制系统,其包括:
[0140]
电压采集模块,其用于采集直流侧电压;
[0141]
信号比较模块,其用于将采集的直流侧电压与期望中点电压比较,得到中点电压误差值;
[0142]
平相分数阶pi控制器,其用于将中点电压误差值经基于平相的分数阶pi控制算法处理,得到中间变量;
[0143]
空间矢量脉宽调制器,其用于将所述中间变量作为小矢量的占空比,再经空间矢量脉宽调制算法,得到调制波,以控制三电平逆变器中的开关管开闭,最终实现三电平逆变器中点电压误差、电流跟踪时间和电流谐波的协同控制。
[0144]
在具体实施中,在所述平相分数阶pi控制器中,所述中间变量设为x:
[0145]
[0146]
其中,δu为直流侧电压差;k
p
、ki和λ分别是积分基于平相的分数阶pi控制算法中的比例系数、积分系数和积分阶次。
[0147]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。