1.本发明涉及机场运行管理领域,尤其涉及一种基于运行状态的多跑道运行 模式自动判定与跟踪方法。
背景技术:
2.当前,机场对于跑道运行的管理通常是基于机场值班人员依赖视频监控、 场监雷达等设备对跑道运行的情况进行观察来判断机场跑道的运行状态,再根 据每条跑道的运行状态来安排相应的跟进工作。截止2021年11月,国内多跑 道机场即不少于2条实体运行跑道的机场共计19座,国内多跑道机场多为双跑 道运行机场,也有4跑道运行机场如大兴机场、3跑道运行机场如首都国际机场。 对于多跑道机场来说,这种跑道运行的管理方式不便于机场管理人员对整个机 场的多条跑道进行整体管控。
技术实现要素:
3.针对现有技术存在的不足之处,本发明的目的在于提供一种基于运行状态 的多跑道运行模式自动判定与跟踪方法,通过构建跑道运行状态矩阵的方式可 判定多条跑道的运行状态,从而使机场能够准确高效的获取机场多跑道运行模 式的信息,以便于机场运行中心根据机场多跑道运行模式对机场所有跑道进行 整体管控,从而可使机场管理人员针对多条跑道的运行模式能及时作出反应, 因此能提高机场管理工作的效率。
4.本发明的目的通过下述技术方案实现:
5.一种基于运行状态的多跑道运行模式自动判定与跟踪方法,其方法如下:
6.a、构建跑道运行状态矩阵
7.跑道运行状态矩阵设置为其中,s
1u
表示 跑道一侧入口端的航空器起飞状态、s2u表示与s1u同一侧入口端的航空器降 落状态,s
1n
表示该跑道另一侧入口端的航空器起飞状态、s
2n
表示与s
1n
跑 道同一侧入口端的航空器降落状态;rh、rj为跑道编号,其中r为跑道号rwy 的缩写,h与j的取值均为大于等于1的整数;
8.b、根据跑道运行状态矩阵判定跑道运行模式
9.当跑道一侧入口端有航空器起飞时s
1u
赋值为1,无航空器起飞时则s
1u
赋 值为0;当与s
1u
同一侧的跑道入口端有航空器降落时s2u赋值为1,无航空器 降落时则s2u赋值为0;当跑道另一侧入口端有航空器起飞时s
1n
赋值为1,无 航空器起飞时则s
1n
赋值为0;当与s
1n
同一侧的跑道入口端有航空器降落时 s
2n
赋值为1,无航空器降落时则s
2n
赋值为0。
10.进一步的,步骤a中当|θ
rh-θ
rj
|≤15
°
且跑道rh的中心点与跑道rj的中 心点之间的垂直距离不超过5km则判定跑道rh与跑道rj为平行跑道,否则跑 道运行状态矩阵
中仅一条跑道运行;其中θ为跑 道两侧入口端的方向角,θ
rh
则为跑道编号为rh的方向角,θ
rj
则为跑道编号 为rj的方向角,该方向角为跑道中心线与磁北方向的夹角。
11.再进一步的,步骤b中的跑道运行模式包括单跑道运行模式、隔离平行跑 道模式、独立/相关平行离场模式、独立/相关平行进近模式以及独立/相关平行 离场与进近模式五种运行模式,该五种运行模式可相互切换;其中单跑道运行 模式的跑道运行状态矩阵为隔离平行跑道模式的跑 道运行状态矩阵为独立/相关平行离场模式的跑道运 行状态矩阵为独立/相关平行进近模式的跑道运行 状态矩阵为独立/相关平行离场与进近模式的跑道 运行状态矩阵为同一条跑道只一侧入口端运行。
12.更进一步的,由单跑道运行模式切换为其他四种运行模式、由隔离平行跑 道模式切换为除单跑道运行模式以外的其他三种运行模式、由独立/相关平行离 场模式切换为独立/相关平行进近模式和独立/相关平行离场与进近模式、以及 由独立/相关平行进近模式切换为独立/相关平行离场与进近模式的间隔时间为 x分钟,其他模式切换的间隔时间为y分钟;其中x的取值为5≤x≤10,y的取 值为25≤y≤40。
13.优选地,所述x的取值为5,所述y的取值为30。
14.本发明较现有技术相比,具有以下优点及有益效果:
15.(1)本发明通过构建跑道运行状态矩阵的方式可判定多条跑道的运行模 式,从而使机场能够准确高效的获取机场多跑道运行模式的信息,以便于机场 运行中心根据机场多跑道运行模式对机场所有跑道进行整体管控,从而可使机 场管理人员针对多条跑道的运行模式能及时作出反应,因此能提高机场管理工 作的效率。
16.(2)本发明通过判定跑道的跑道运行状态矩阵中两条跑道是否为平行跑道 的方式可确定两条跑道是否同时运行,从而能够更加便捷的确定跑道的运行模 式。
17.(3)本发明步骤b中定义了五种跑道的运行模式,可便于机场获取跑道的 运行模式信息并能准确的判定跑道的运行模式。
18.(4)本发明考虑到实际机场跑道运行时会根据航班流量压力、气象条件、 通信导航设备等情况进行运行模式的切换,设置了能够根据跑道起降状态的分 析结果及时进行
运行模式的更新与切换的步骤。
附图说明
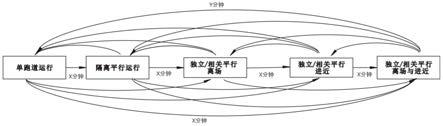
19.图1为本发明的跑道运行模式相互切换的示意图。
具体实施方式
20.下面结合实施例对本发明作进一步地详细说明:
21.实施例
22.如图1所示,一种基于运行状态的多跑道运行模式自动判定与跟踪方法, 其方法如下:
23.a、构建跑道运行状态矩阵:
24.跑道的跑道运行状态矩阵设置为s
1u
表示 跑道一侧入口端的航空器起飞状态、s2u表示与s1u同一侧入口端的航空器降 落状态,s
1n
表示该跑道另一侧入口端的航空器起飞状态、s
2n
表示与s
1n
跑 道同一侧入口端的航空器降落状态。同一条跑道具有两侧入口端,两侧的入口 端均可用于航空器的起降活动,为了便于表述同一条跑道的航空器运行状态, 本发明将跑道的一侧记为u,另一侧则记为n。其中,rh、rj为跑道编号,其 中r为跑道号rwy的缩写,h与j的取值均为大于等于1的整数。使用时多跑道 机场的跑道即可记为rwy1、rwy2、rwy3
···
。本发明通过构建跑道运行状态 矩阵的方式可直观的判定多条跑道的运行模式,从而使机场管理人员能够准确 高效的获取多跑道机场的所有跑道运行模式的信息,以便于机场运行中心根据 机场多跑道运行模式对机场所有跑道进行整体管控,从而可使机场管理人员针 对多条跑道的运行模式能及时作出反应,因此能提高机场管理工作的效率。
25.目前国内的双跑道机场的两条跑道均为平行跑道,而三条或以上跑道机场 则不一定,且随着中国民航基础建设的发展,非平行跑道运行机场存在新增的 可能。为保证本方法的通用性,本发明还对跑道进行了是否为平行跑道的判断。 即当|θ
rh-θ
rj
|≤15
°
且跑道rh的中心点与跑道rj的中心点之间的垂直距离不 超过5km则判定跑道rh与跑道rj为平行跑道,跑道运行状态矩阵 中两条跑道均处于运行模式,否则判定跑道rh与 跑道rj为单跑道运行,即跑道运行状态矩阵中仅 一条跑道运行。
26.b、根据跑道运行状态矩阵判定跑道运行模式
27.当跑道一侧入口端有航空器起飞时s
1u
赋值为1,无航空器起飞时则s
1u
赋 值为0;当与s
1u
同一侧的跑道入口端有航空器降落时s2u赋值为1,无航空器 降落时则s2u赋值为0;当跑道另一侧入口端有航空器起飞时s
1n
赋值为1,无 航空器起飞时则s
1n
赋值为0;当与s
1n
同一侧的跑道入口端有航空器降落时 s
2n
赋值为1,无航空器降落时则s
2n
赋值为0。根据跑道运行状态即是否有航 空器起飞或降落即可确定跑道运行状态矩阵,根据该跑道运行状态矩阵即可判 定跑道运行模式。例如,若跑道的运行状态矩阵为则 表示使用的是单跑道运行模式,即使用rwy1跑道的u侧运行,且rwy1跑道的u 侧同时承担航空器的起飞和降落。需要注意的是,一条实体跑道在同个一时间 段只能使用同一侧入口端运行,即同一跑道在同一个时间段只能同时使用u侧 或n侧的入口端运行。
28.为了便于标识跑道的运行模式,以便于本发明自动识别后输出跑道的运行 模式,本发明将跑道的运行模式设置为五种,该五种跑道运行模式与相对应的 运行状况如表一所示。
[0029][0030]
表一
[0031]
根据表一所示,所述五种跑道运行模式包括单跑道运行模式、隔离平行跑 道模式、独立/相关平行离场模式、独立/相关平行进近模式以及独立/相关平行 离场与进近模式五种运行模式,该五种运行模式可相互切换。本发明设置五种 跑道的运行模式可便于机场管理人员直观的获得多跑道机场的运行状态,以便 于管理人员针对相应运行跑道的接机、送机等管理工作作出合理的判断,并快 速且高效的安排相应的跟进工作。
[0032]
表一中还示出了跑道运行模式所对应的跑道运行状态矩阵,即单跑道运行 模式的跑道运行状态矩阵为隔离平行跑道模式的跑 道运行状态矩阵为独立/相关平行离场模式的跑道运 行状态矩阵为独立/相关平行进近模式的跑道运行 状态矩阵为
独立/相关平行离场与进近模式的跑道 运行状态矩阵为
[0033]
由于航空器的起降过程需要一定的时间,且其安全运行尤为重要,因此跑 道的五种运行模式相互之间的切换需要有一定的时间间隔,根据实际使用需求, 本发明设置跑道运行模式相互切换所需的相应的两个间隔时间。具体的,由单 跑道运行模式切换为其他四种运行模式的间隔时间为x分钟,即由单跑道运行 模式切换为隔离平行跑道模式、由单跑道运行模式切换为独立/相关平行离场模 式、由单跑道运行模式切换为独立/相关平行进近模式、以及由单跑道运行模式 切换为独立/相关平行离场与进近模式的间隔时间均为x分钟,如图1所示。由 隔离平行跑道模式切换为除单跑道运行模式以外的其他三种运行模式的时间间 隔也为x分钟,即由隔离平行跑道模式切换为独立/相关平行离场模式、由隔离 平行跑道模式切换为独立/相关平行进近模式、以及由隔离平行跑道模式切换为 独立/相关平行离场与进近模式的间隔时间均为x分钟。由独立/相关平行离场 模式切换为独立/相关平行进近模式和独立/相关平行离场与进近模式的时间间 隔也为x分钟,即由独立/相关平行离场模式切换为独立/相关平行进近模式、 以及由独立/相关平行离场模式切换为独立/相关平行离场与进近模式的间隔时 间均为x分钟。由独立/相关平行进近模式切换为独立/相关平行离场与进近模 式的间隔时间也为x分钟。
[0034]
其他模式切换的间隔时间均为y分钟,即由隔离平行跑道模式切换为单跑 道运行模式的间隔时间为y分钟;由独立/相关平行离场模式切换为单跑道运行 模式、以及由独立/相关平行离场模式切换为隔离平行跑道模式的间隔时间也均 为y分钟;由独立/相关平行进近模式切换为单跑道运行模式、由独立/相关平 行进近模式切换为隔离平行跑道模式、以及由独立/相关平行进近模式切换为独 立/相关平行离场模式的间隔时间也均为y分钟;由独立/相关平行离场与进近 模式切换为单跑道运行模式、由独立/相关平行离场与进近模式切换为隔离平行 跑道模式、由独立/相关平行离场与进近模式切换为独立/相关平行离场模式、 以及由独立/相关平行离场与进近模式切换为独立/相关平行进近模式的间隔时 间也均为y分钟,如图1所示。
[0035]
参考航空器的实际起降运行所需时间以及机场跑道使用频率,本发明的x 的取值为5≤x≤10,y的取值为25≤y≤40。本实施例中x的取值为5,y的取 值为30。基于本发明的跑道运行模式的切换,机场管理人员能即时对机场跑道 运行状态变化作出快速反应,从而便于机场管理人员根据切换后的机场跑道运 行模式能预判性并合理的安排相应的跟进工作。
[0036]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发 明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明 的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。