技术特征:
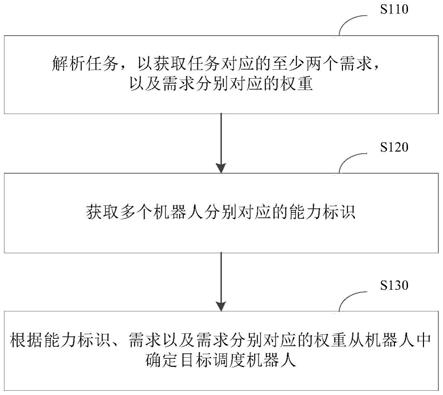
1.一种机器人调度方法,其特征在于,包括:解析任务,以获取所述任务对应的至少两个需求,以及所述需求分别对应的权重;获取多个机器人分别对应的能力标识;根据所述能力标识、所述需求以及所述需求分别对应的权重从所述机器人中确定目标调度机器人。2.根据权利要求1所述的方法,其特征在于,所述根据所述能力标识、所述需求以及所述需求分别对应的权重从所述机器人中确定目标调度机器人,包括:获取所述权重中,值大于预设阈值的至少一个目标权重;根据所述目标权重对应的需求,所述目标权重以及所述能力标识,获取对各个所述机器人的评分,所述评分用于表示所述机器人满足所述需求的能力;将值最高的所述评分对应的机器人作为目标调度机器人。3.根据权利要求2所述的方法,其特征在于,所述根据所述目标权重对应的需求,所述目标权重以及所述能力标识,获取对各个所述机器人的评分,包括:根据所述目标权重对应的需求,以及根据所述能力标识,对所述机器人进行筛选,以筛选出满足所述目标权重对应的需求的至少一个候选机器人;获取所述候选机器人满足除所述目标权重外的其他权重对应的需求的评分;将所述评分与所述目标权重之积,作为所述候选机器人的最终评分,以将值最高的所述最终评分对应的候选机器人作为目标调度机器人。4.根据权利要求1所述的方法,其特征在于,所述解析任务,以获取所述任务对应的至少两个需求,包括:获取并解析多模态任务,所述多模态任务的输入包括图像、动作、文本以及语音输入中至少一个输入;对所述多模态任务的输入进行解析,以获取所述多模态任务对应的至少两个需求。5.根据权利要求4所述的方法,其特征在于,所述对所述多模态任务的输入进行解析,以获取所述多模态任务对应的至少两个需求,包括:获取标准需求组件库,所述标准需求组件库内具有多个需求,以及所述需求分别对应的文本描述;根据所述标准需求组件库,对所述多模态任务的输入进行解析,以生成标准化处理后的至少两个需求。6.根据权利要求5所述的方法,其特征在于,所述获取多个机器人的能力标识,包括:获取多个机器人分别对应的功能;根据所述标准需求组件库以及所述机器人分别对应的功能,生成所述机器人分别对应的能力标识。7.根据权利要求5所述的方法,其特征在于,所述生成所述机器人分别对应的能力标识之后,所述方法还包括:基于标准化处理后的所述需求,生成待匹配的需求集合,所述需求集合包括所述需求,以及所述需求对应的文本描述;基于所述机器人分别对应的能力标识,生成待匹配的能力集合,所述能力结合包括机器人标识,所述机器人标识对应的机器人的能力标识,所述能力标识对应的文本描述,以及
对所述能力的评分;基于所述需求集合以及所述能力集合,从所述机器人中确定目标调度机器人。8.根据权利要求1所述的方法,其特征在于,所述获取多个机器人分别对应的能力标识,包括:获取机器人的静态能力标识;以及实时获取所述机器人的动态能力标识。9.一种机器人调度系统,其特征在于,包括:机器人端,提供了多个机器人,所述机器人具有对应的能力标识,所述机器人端具有调度接口;服务器端,所述服务器端具有任务接收接口,用于解析所述任务接收接口所接收的任务的解析模块以及控制模块,所述解析模块用于生成所述任务对应的至少两个需求;控制模块用于根据所述能力标识、所述需求以及所述需求分别对应的权重从所述机器人中确定目标调度机器人,并发送至所述调度接口。10.根据权利要求9所述的系统,其特征在于,所述服务器端还具有能力标准化模块,所述能力标准化模块用于根据标准需求组件库以及所述机器人分别对应的功能,生成所述机器人分别对应的能力标识,以及生成标准化处理后的至少两个需求,以基于标准化处理后的能力标识以及需求进行目标调度机器人的选择。
技术总结
本申请属于智能机器人领域,提供了一种机器人调度方法及系统,机器人调度方法包括:解析任务,以获取任务对应的至少两个需求,以及需求分别对应的权重;获取多个机器人分别对应的能力标识;根据能力标识、需求以及需求分别对应的权重从机器人中确定目标调度机器人。本申请实施例中的机器人调度方法能够准确识别目标调度机器人,进而提升机器人的调度效率。进而提升机器人的调度效率。进而提升机器人的调度效率。
技术研发人员:李伟 杨明川 高飞
受保护的技术使用者:中国电信股份有限公司
技术研发日:2021.12.17
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。