1.本发明涉及油田井测试技术领域,具体而言,特别涉及一种机械式可回收支持臂打捞器及其工作方法。
背景技术:
2.在油田井测试领域中,为了获得油井、气井或注水井的井下流量、压力恢复等情况,需要采用测试仪器对井况进行定时、定深度的测试。现有技术多采用悬挂器悬挂测试仪器进行测试,完成测试后将悬挂器打捞出井,通过设置有支持臂的悬挂器可实现先释放悬挂器的支持臂,并在完成悬挂之后进行脱挂的稳定可靠精准释放、悬挂。
3.但现有技术的打捞装置无法实现悬挂器的支持臂回收,同时井上钢丝作业可能出现打捞遇阻现象以及钢丝绳断裂的风险,导致井上作业的时间加长,作业风险加大。
技术实现要素:
4.为了弥补现有技术的不足,本发明提供了一种机械式可回收支持臂打捞器及其工作方法。
5.本发明是通过如下技术方案实现的:
6.一种机械式可回收支持臂打捞器,包括抓手、限位柱、限位套、打捞筒、弹簧筒、剪切销钉、螺帽、中心顶杆、钢珠、第一压缩弹簧、第二压缩弹簧,所述限位套为内壁对称设置有凸起结构的空心柱体;所述打捞筒为两端开口的柱形腔体,所述打捞筒一端嵌入于所述限位套的一侧内部,所述打捞筒嵌入所述限位套的部分的外壁设置有外螺纹,所述限位套套有所述打捞筒的部分的内壁设置有内螺纹,所述打捞筒通过螺纹与所述限位套固定连接;所述打捞筒远离嵌入于所述限位套的部分的外壁设置有用于安装所述抓手的安装槽;所述抓手一端部对称设置有两组卡爪,卡爪的内部开设有满足悬挂器蘑菇头卡入的内部台阶,卡爪的端部设置有便于悬挂器蘑菇头卡入的向所述打捞筒内部倾斜的钩状结构;所述抓手的另一端部与所述限位套之间设置有所述第二压缩弹簧,所述第二压缩弹簧套于所述打捞筒外壁;所述弹簧筒为一端开口的柱形腔体,所述弹簧筒开口端部分嵌入于所述限位套的另一侧内部,所述弹簧筒远离所述弹簧筒开口端的腔体内设置有第一压缩弹簧,所述第一压缩弹簧的一端紧贴于所述弹簧筒的腔体顶壁,所述第一压缩弹簧的另一端紧贴所述螺帽的顶部,所述螺帽为圆柱体结构,所述螺帽的底部与所述中心顶杆的顶部固定连接,所述中心顶杆为圆柱体结构,所述中心顶杆通过所述限位套贯穿于所述打捞筒;所述中心顶杆对应所述限位套的凸起结构位置处设置有半弧形限位凹槽,所述中心顶杆对应所述限位套位置处套有所述限位柱;所述限位柱为空心柱体;所述限位柱对应所述限位套的凸起结构位置处开设有圆形限位孔,所述限位柱通过所述剪切销钉实现与所述限位套的限位,所述钢珠通过所述限位柱的限位孔嵌入于所述中心顶杆的限位凹槽内。
7.优选地,所述螺帽的外径小于所述弹簧筒的柱形腔体的内径,所述螺帽的外径大于所述中心顶杆的外径。
8.优选地,所述限位柱靠近所述弹簧筒的柱体外径小于所述弹簧筒的柱形腔体的内径,所述限位柱靠近所述打捞筒的柱体外径小于嵌入所述限位套部分的所述打捞筒的内径同时大于靠近所述弹簧筒的所述限位柱的外径。
9.一种机械式可回收支持臂打捞器的工作方法,具体包括以下步骤:
10.s1:通过钢丝与打捞器顶端部绑定并作业入井打捞悬挂器,通过快速下放打捞器,撞击所述抓手,所述抓手开口增大,悬挂器蘑菇头进入所述抓手的内部台阶,通过所述第二压缩弹簧预紧力实现所述抓手复位;
11.s2:上提打捞器,所述剪切销钉产生剪切断裂,所述限位柱与所述限位套发生相对位移,所述钢珠解锁并落入所述限位套与所述弹簧筒因相对位移产生的空间内,通过所述第一压缩弹簧推动所述中心顶杆向下移动,完成对悬挂器的支持臂回收。
12.本发明由于采用了以上技术方案,与现有技术相比使其具有以下有益效果:本专利技术方案结构简单,加工制造成本低,实现了打捞器回收悬挂器支持臂的功能,减小了油田钢丝作业的风险。
13.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
14.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
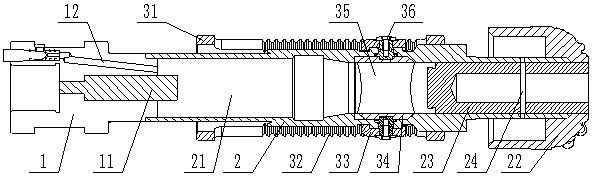
15.图1为本发明下放状态的剖面结构示意图;
16.图2为本发明提升状态的剖面结构示意图。
17.其中,图1至图2中附图标记与部件之间的对应关系为:
18.1、抓手;2、限位柱;3、限位套;4、打捞筒;5、弹簧筒;6、剪切销钉;7、螺帽;8、中心顶杆;9、钢珠;10、第一压缩弹簧;11、第二压缩弹簧。
具体实施方式
19.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
20.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
21.下面结合图1至图2对本发明的实施例的一种机械式可回收支持臂打捞器及其工作方法进行具体说明。
22.一种机械式可回收支持臂打捞器,包括抓手1、限位柱2、限位套3、打捞筒4、弹簧筒5、剪切销钉6、螺帽7、中心顶杆8、钢珠9、第一压缩弹簧10、第二压缩弹簧11,限位套3为内壁对称设置有凸起结构的空心柱体;打捞筒4为两端开口的柱形腔体,打捞筒4一端嵌入于限位套3的一侧内部,打捞筒4嵌入限位套3的部分的外壁设置有外螺纹,限位套3套有打捞筒4的部分的内壁设置有内螺纹,打捞筒4通过螺纹与限位套3固定连接;打捞筒4远离嵌入于限
位套3的部分的外壁设置有用于安装抓手1的安装槽;抓手1一端部对称设置有两组卡爪,卡爪的内部开设有满足悬挂器蘑菇头卡入的内部台阶,卡爪的端部设置有便于悬挂器蘑菇头卡入的向打捞筒4内部倾斜的钩状结构;抓手1的另一端部与限位套3之间设置有第二压缩弹簧11,第二压缩弹簧11套于打捞筒4外壁;弹簧筒5为一端开口的柱形腔体,弹簧筒5开口端部分嵌入于限位套3的另一侧内部,弹簧筒5远离弹簧筒5开口端的腔体内设置有第一压缩弹簧10,第一压缩弹簧10的一端紧贴于弹簧筒5的腔体顶壁,第一压缩弹簧10的另一端紧贴螺帽7的顶部,螺帽7为圆柱体结构,螺帽的外径略小于弹簧筒5的柱形腔体的内径,螺帽7的底部与中心顶杆8的顶部固定连接,中心顶杆8为圆柱体结构,中心顶杆8的外径小于螺帽7的外径,中心顶杆8通过限位套3贯穿于打捞筒4;中心顶杆8对应限位套3的凸起结构位置处设置有半弧形限位凹槽,中心顶杆8对应限位套3位置处套有限位柱2;限位柱2为空心柱体,限位柱2靠近弹簧筒5的柱体外径略小于弹簧筒5的柱形腔体的内径,限位柱2靠近打捞筒4的柱体外径略小于嵌入限位套3部分的打捞筒4的内径且大于靠近弹簧筒5的限位柱2的外径;限位柱2对应限位套3的凸起结构位置处开设有圆形限位孔,限位柱2通过剪切销钉6实现与限位套3的限位,钢珠9通过限位柱2的限位孔嵌入于中心顶杆8的限位凹槽内。
23.一种机械式可回收支持臂打捞器的工作方法,具体包括以下步骤:
24.s1:通过钢丝与打捞器顶端部绑定并作业入井打捞悬挂器,通过快速下放打捞器,撞击抓手1,抓手1开口增大,悬挂器蘑菇头进入抓手1的内部台阶,通过第二压缩弹簧11预紧力实现抓手1复位;
25.s2:上提打捞器,剪切销钉6产生剪切断裂,限位柱2与限位套3发生相对位移,钢珠9解锁并落入限位套3与弹簧筒5因相对位移产生的空间内,通过第一压缩弹簧10推动中心顶杆8向下移动,完成对悬挂器的支持臂回收。
26.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。