一种基于背景与尺度感知的sar舰船目标检测方法
技术领域
1.本发明属于雷达检测及信号处理领域,具体涉及一种基于背景与尺度感知的sar舰船目标检测方法。
背景技术:
2.海面舰船目标检测在海洋监管、渔业管理、船只搜救、海洋军事等领域有着广泛应用。合成孔径雷达(sar,synthetic aperture radar)具有全天时、全天候和大幅宽的特性,使得其在复杂的环境下也能对广阔海域进行成像,是海洋监控和海洋情报提取的重要信息来源。随着星载sar和机载sar传感器越来越多,对海sar数据日益增加,急需一种快速实现sar舰船目标检测的智能算法。然而,sar图像舰船目标检测面临两个主要难点:1)在海岸线、港口和岛礁附近对舰船进行检测时,陆地上的强散射物会形成强杂波,带来高虚警率;2)中小渔船在海洋总船只数量中占比最大,而中小渔船尺寸较小,在sar图像中占据较少像素。小尺寸目标在神经网络传输过程中,信息容易丢失,造成较高的漏检率。
技术实现要素:
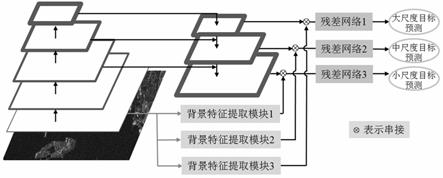
3.本发明针对上述问题,提出一种基于背景与尺度感知的sar舰船目标检测方法,由于海面和陆地对微波的散射分布有明显差异,陆地虚警的背景对微波的散射普遍比海面舰船的背景对微波的散射强,如图1所示。因此,本方法从卷积神经网络的浅层卷积层中提取不同尺度的背景特征与网络输出特征进行融合,利用背景特征辅助舰船检测,降低陆地上的虚警率。同时,方法采用尺度感知损失函数使模型在训练过程中更关注小目标,提升小目标检测率;采用一种多尺度训练方法,已有多尺度训练策略通常将原始图像进行缩放到不同尺度,然后输入到网络进行训练,由于输入图像大小不同,每次迭代所需时间和硬件资源差异较大,本方法的多尺度训练策略在保证多尺度训练的同时使每次输入网络的图像大小固定,实现每次迭代所需时间以及所需硬件资源保持一致。整体网络模型结构如图2所示。
4.本发明针对现有sar舰船目标检测方法在陆地上虚警率高,以及对小尺寸舰船目标漏检率高的难题,提出的基于背景与尺度感知的sar舰船目标检测方法可以为基于sar的海洋监管和海洋态势信息获取提供核心技术支撑。其具体步骤如下:步骤(10)背景感知网络模型构建:采用yolov3的金字塔网络结构,在三个尺度上输出卷积特征,预测三种不同大小尺度的舰船目标;为了抑制陆地上的虚警目标,提取卷积神经网络浅层卷积层中的背景特征,将背景特征与输出卷积特征进行串接融合,利用陆地背景信息辅助舰船虚警检测,达到降低虚警率的目的;由于背景特征在浅层网络中提取,语义信息不足,因此为了保证足够的语义信息,在融合特征后接残差网络,残差网络中所有卷积层后面都紧接归一化层;步骤(20)尺度感知损失函数计算:采用yolov3的损失函数结构,包含目标回归框的横、纵轴坐标损失,目标宽、高损失和置信度损失,损失函数为:
ꢀꢀ
(1)
其中,为横、纵坐标损失,为宽、高损失,为置信度损失;为了使模型在训练过程中重点关注小目标,针对每个目标设计不同权重,使得小尺度目标权重增大,再将权重乘到对应目标损失函数上,实现尺度感知损失函数设计,目标权重计算公式如下:
ꢀꢀ
(2)其中,和为输入图像的宽和高,和为舰船目标在输入图像上的宽和高,最终将目标的权重乘到目标特征位置对应的损失函数上,实现尺度感知损失函数计算。
5.步骤(30)多尺度训练:采用舰船检测数据集训练模型,随机抽取尺度,然后以该尺度在训练图中随机裁取大小图片,再将裁取的图片缩放到512
×
512像素大小作为训练样本输入卷积神经网络实现多尺度训练。
6.卷积神经网络的训练就是基于尺度感知损失函数,尺度感知损失函数就是网络的全部损失函数。损失函数计算出损失后利用梯度下降法和反向传播算法进行网络训练。
7.基于步骤(10)中的背景感知网络模型和步骤(20)中的尺度感知损失函数,接下来就是利用样本进行迭代训练。在每次迭代训练中需要获取一个批次(batch)的样本数据,根据多尺度样本获取方法,获取多尺度样本训练网络模型的方法。
8.步骤(40)sar舰船目标检测:将宽幅sar图像进行分块,送入训练好的卷积神经网络进行舰船检测,然后将检测结果拼接,再进行非极大值抑制得到最终检测结果。
9.本发明的有益效果在于:本发明实现了高检测率和低虚警率的sar舰船目标检测方法,为基于sar的海洋监管和海洋态势信息获取提供核心技术支撑。相比于现有sar舰船目标检测方法,其显著优点为:设计背景感知的舰船检测网络模型,充分利用了背景信息,有效降低了虚警率;设计尺度感知损失函数,使模型在训练过程中更加关注小目标,提升小目标检测率;采用多尺度训练策略,在保证多尺度训练的同时每次输入网络的图像大小固定,实现每次迭代所需时间以及所需硬件资源保持一致。
附图说明
10.图1为海面舰船与陆地虚警的背景对比图。
11.图2为方法整体网络模型结构图。
12.图3为背景特征提取模块网络结构图。
13.图4为残差网络结构图。
14.图5为训练样本多尺度采集示意图。
具体实施方式
15.下面结合附图对本发明做进一步详细说明。
16.sar舰船目标有如下特点:1)海岸线、港口、岛礁附近陆地上强散射物体很容易形成强干扰,造成大量虚假舰船检测结果;2)大量中小型渔船和货船在sar图像中尺寸较小,在神经网络传输过程中容易丢失信息,造成漏检。因此,为了降低虚警,本方法提取了虚假目标背景特征,利用背景特征辅助剔除虚假目标;设计尺度感知损失函数,使模型在训练过
程中更关注小目标,提升小目标检测率。具体实施步骤如下:步骤(10)背景感知网络模型构建:本方法采用yolov3的金字塔网络结构,在三个尺度上输出卷积特征,预测三种不同大小尺度的舰船目标。为了抑制陆地上的虚警目标,提取卷积神经网络浅层卷积层中的背景特征,将背景特征与输出卷积特征进行串接融合(后续称为融合特征),利用陆地背景信息辅助舰船虚警检测,达到降低虚警率的目的。整体网络模型结构如图2所示。背景特征提取模块采用1
×
9、9
×
1的空洞卷积(dilated convolution),如图3所示,其中,括号中内容(m
×
n, f, s, d)表示卷积核大小为m
×
n,卷积核个数为f,卷积步长为s,空洞卷积的扩张率(dilation rate)为d,图2中的背景特征提取模块1、背景特征提取模块2和背景特征提取模块3的卷积核个数f分别为256、128和64,卷积步长s分别为4、8和16,背景特征提取模块中所有卷积层后面都紧接批归一化层(batch normalization)和relu激活层。由于背景特征在浅层网络中提取,语义信息不足,因此为了保证足够的语义信息,在融合特征后接残差网络。残差网络如图4所示,其中,括号中内容(m
×
n, f)表示卷积核大小为m
×
n,卷积核个数为f,残差网络中所有卷积层后面都紧接批归一化层。方法采用yolov3的损失函数和锚定框(anchor box)设置,因此,预测目标的输出层包含25个1
×
1的卷积核,对应每个锚定框(总共5个锚定框)的5个输出。
17.步骤(20)尺度感知损失函数设计:方法采用yolov3的损失函数结构,包含目标回归框的横(x)、纵(y)轴坐标损失,目标宽(w)、高(h)损失和置信度损失,由于本方法只针对舰船检测任务,不做分类,故没有类别损失。损失函数为:
ꢀꢀ
(1)其中,为回归框横、纵坐标损失,为回归框宽、高损失,为置信度损失。为了使模型在训练过程中重点关注小目标,针对每个目标设计不同权重,使得小尺度目标权重增大,再将权重乘到对应目标损失函数上,实现尺度感知损失函数设计。目标权重计算公式如下:
ꢀꢀ
(2)其中,和为输入图像的宽和高,和为舰船目标在输入图像上的宽和高。可以看出小尺寸舰船目标的权重增大。最终将目标的权重乘到目标特征位置对应的损失函数上,实现尺度感知损失函数设计。
18.步骤(30)多尺度训练:采用自制的舰船检测数据集训练模型,数据集中图片大小为1000
×
1000像素。为了提升方法在大、中、小多尺度目标上的检测效果,在尺度集合{384, 416, 448, 480, 512, 544, 576, 608, 640}中随机抽取尺度,然后以该尺度在训练图中随机裁取大小图片,再将裁取的图片缩放到512
×
512大小作为训练样本输入网络实现多尺度训练,训练样本的多尺度采集策略如图5所示。利用梯度下降(sgd)法对模型进行训练,批大小(batch size)设置为8。模型总共训练200个周期(epoch)。初始学习率设置为0.001,每40个周期学习率乘0.5。所有训练过程中权值衰减(weight decay)设为0.0005,动量(momentum)设为0.9。
19.步骤(40)sar舰船目标检测:将宽幅sar进行分块,送入训练好的卷积神经网络进行舰船检测,然后将检测结果拼接,再进行非极大值抑制(nms)得到最终结果。实验证明本
方法在ssdd数据集上对舰船检测的虚警率比yolov3方法降低了7.8%,检测率比yolov3方法提升了6.3%。
20.本发明不局限于上述具体的实施方式,本发明可以有各种更改和变化。凡是依据本发明的技术实质对以上实施方式所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。