技术特征:
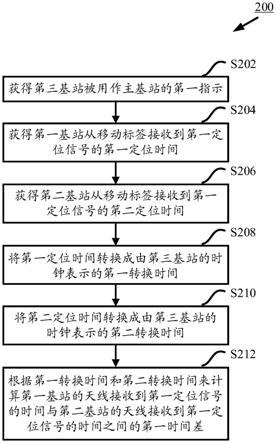
1.一种定位方法,用于定位系统,所述定位系统包括第一基站(b)、第二基站(c)、第三基站(a)和移动标签(tag),其特征在于,所述定位方法包括:获得所述第三基站(a)被用作主基站的第一指示;获得所述第一基站(b)从所述移动标签(tag)接收到第一定位信号的第一定位时间(tb);获得所述第二基站(c)从所述移动标签(tag)接收到所述第一定位信号的第二定位时间(tc);将所述第一定位时间(tb)转换成由所述第三基站(a)的时钟表示的第一转换时间;将所述第二定位时间(tc)转换成由所述第三基站(a)的所述时钟表示的第二转换时间;以及根据所述第一转换时间和所述第二转换时间来计算所述第一基站(b)的天线接收到所述第一定位信号的时间与所述第二基站(c)的天线接收到所述第一定位信号的时间之间的第一时间差。2.根据权利要求1所述的定位方法,其特征在于,将所述第一定位时间(tb)转换成由所述第三基站(a)的时钟表示的第一转换时间包括:获得所述第三基站(a)向所述第一基站(b)发送第一同步信号的第一发送时间(ta1);获得所述第一基站(b)接收到所述第一同步信号的第一接收时间(tb1);获得所述第三基站(a)向所述第一基站(b)发送第二同步信号的第二发送时间(ta2);获得所述第一基站(b)接收到所述第二同步信号的第二接收时间(tb2);根据所述第三基站(a)与所述第一基站(b)之间的距离,计算信号在空中从所述第三基站(a)的天线传播到所述第一基站(b)的天线的第一传播时间;以及用所述第一发送时间(ta1)、所述第一接收时间(tb1)、所述第二发送时间(ta2)、所述第二接收时间(tb2)、所述第一传播时间、所述第一定位时间(tb)、所述第三基站(a)的天线的发送延时以及所述第一基站(b)的天线的接收延时来表示所述第一转换时间。3.根据权利要求2所述的定位方法,其特征在于,所述第一转换时间被表示为:其中,tba表示所述第一转换时间,tb表示所述第一定位时间,tb1表示所述第一接收时间,tb2表示所述第二接收时间,ta1表示所述第一发送时间,ta2表示所述第二发送时间,δta表示所述第三基站(a)的所述天线的发送延时,tccpab表示所述第一传播时间,以及δrb表示所述第一基站(b)的所述天线的接收延时。4.根据权利要求1至3中任一项所述的定位方法,其特征在于,将所述第二定位时间(tc)转换成由所述第三基站(a)的所述时钟表示的第二转换时间包括:获得所述第三基站(a)向所述第二基站(c)发送第一同步信号的第一发送时间(ta1);获得所述第二基站(c)接收到所述第一同步信号的第三接收时间(tc1);获得所述第三基站(a)向所述第二基站(c)发送第二同步信号的第二发送时间(ta2);获得所述第二基站(c)接收到所述第二同步信号的第四接收时间(tc2);根据所述第三基站(a)与所述第二基站(c)之间的距离,计算信号在空中从所述第三基站(a)的天线传播到所述第二基站(c)的天线的第二传播时间;以及
用所述第一发送时间(ta1)、所述第三接收时间(tc1)、所述第二发送时间(ta2)、所述第四接收时间(tc2)、所述第二传播时间、所述第二定位时间(tc)、所述第三基站(a)的天线的发送延时以及所述第二基站(c)的天线的接收延时来表示所述第二转换时间。5.根据权利要求4所述的定位方法,其特征在于,所述第二转换时间被表示为:其中,tca表示所述第二转换时间,tc表示所述第二定位时间,tc1表示所述第三接收时间,tc2表示所述第四接收时间,ta1表示所述第一发送时间,ta2表示所述第二发送时间,δta表示所述第三基站(a)的所述天线的发送延时,tccpac表示所述第二传播时间,以及δrc表示所述第二基站(c)的所述天线的接收延时。6.根据权利要求1所述的定位方法,其特征在于,所述定位系统还包括第四基站(d),所述定位方法还包括:获得所述第四基站(d)从所述移动标签(tag)接收到所述第一定位信号的第三定位时间(td);将所述第三定位时间(td)转换成由所述第三基站(a)的所述时钟表示的第三转换时间;以及根据所述第一转换时间和所述第三转换时间来计算所述第一基站(b)的天线接收到所述第一定位信号的时间与所述第四基站(d)的天线接收到所述第一定位信号的时间之间的第二时间差。7.根据权利要求1至3和5至6中任一项所述的定位方法,其特征在于,所述定位方法还包括:获得所述第一基站(b)被用作主基站的第二指示;获得所述第三基站(a)从所述移动标签(tag)接收到第二定位信号的第四定位时间(ta');获得所述第二基站(c)从所述移动标签(tag)接收到所述第二定位信号的第五定位时间(tc');将所述第四定位时间(ta')转换成由所述第一基站(b)的时钟表示的第四转换时间;将所述第五定位时间(tc')转换成由所述第一基站(b)的所述时钟表示的第五转换时间;以及根据所述第四转换时间和所述第五转换时间来计算所述第三基站(a)的天线接收到所述第二定位信号的时间与所述第二基站(c)的天线接收到所述第二定位信号的时间之间的第三时间差。8.根据权利要求6所述的定位方法,其特征在于,所述定位方法还包括:获得所述第一基站(b)被用作主基站的第二指示;获得所述第三基站(a)从所述移动标签(tag)接收到第二定位信号的第四定位时间(ta');获得所述第二基站(c)从所述移动标签(tag)接收到所述第二定位信号的第五定位时间(tc');获得所述第四基站(d)从所述移动标签(tag)接收到所述第二定位信号的第六定位时
间(td');将所述第四定位时间(ta')转换成由所述第一基站(b)的时钟表示的第四转换时间;将所述第五定位时间(tc')转换成由所述第一基站(b)的所述时钟表示的第五转换时间;将所述第六定位时间(td')转换成由所述第一基站(b)的所述时钟表示的第六转换时间;根据所述第四转换时间和所述第五转换时间来计算所述第三基站(a)的天线接收到所述第二定位信号的时间与所述第二基站(c)的天线接收到所述第二定位信号的时间之间的第三时间差;以及根据所述第四转换时间和所述第六转换时间来计算所述第三基站(a)的天线接收到所述第二定位信号的时间与所述第四基站(d)的天线接收到所述第二定位信号的时间之间的第四时间差。9.根据权利要求8所述的定位方法,其特征在于,所述定位方法还包括根据以下项来确定所述移动标签(tag)的位置:所述第一基站(b)的位置;所述第二基站(c)的位置;所述第三基站(a)的位置;所述第四基站(d)的位置;以及以下中的至少三个:所述第一时间差、所述第二时间差、所述第三时间差、和所述第四时间差。10.一种定位装置,用于定位系统,所述定位系统包括第一基站(b)、第二基站(c)、第三基站(a)和移动标签(tag),其特征在于,所述定位装置包括:至少一个处理器;以及存储有计算机程序的至少一个存储器;其中,当所述计算机程序由所述至少一个处理器执行时,使得所述定位装置执行根据权利要求1-9中任一项所述的方法。
技术总结
本公开的实施例提供一种定位方法和定位装置。该定位方法用于定位系统。定位系统包括第一基站、第二基站、第三基站和移动标签。该定位方法包括:获得第三基站被用作主基站的第一指示;获得第一基站从移动标签接收到第一定位信号的第一定位时间;获得第二基站从移动标签接收到第一定位信号的第二定位时间;将第一定位时间转换成由第三基站的时钟表示的第一转换时间;将第二定位时间转换成由第三基站的时钟表示的第二转换时间;以及根据第一转换时间和第二转换时间来计算第一基站的天线接收到第一定位信号的时间与第二基站的天线接收到第一定位信号的时间之间的第一时间差。该定位方法能够更准确地计算第一和第二基站接收到定位信号的时间差。定位信号的时间差。定位信号的时间差。
技术研发人员:徐淑英 曾志刚 谷海峰 张韵
受保护的技术使用者:武汉乾阳智能科技有限公司
技术研发日:2021.12.15
技术公布日:2022/3/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。