1.本发明涉及天线通信技术领域,尤其涉及一种水下航行器载鞭天线的最佳工作频率确认方法及系统。
背景技术:
2.天线辐射与电磁波传播问题主要用于研究雷达、舰艇之间的无线电通信任务。尤其对于小型无人艇来说,近距离的组网通信是战时等特殊时期不可或缺的一项重要保障。由于受风速、涌浪等因素影响,海面环境常常复杂多变,对于无线电传播过程无疑会造成影响;又因无人艇具有质量轻、体积小等特点,无法负载大功率的发射天线,通常其搭载的发射机功率范围为10-50 w,鞭天线长度通常为1 m左右。对于短波和超短波频段来说,海水是一种良导体,其对电磁波的吸收能力随频率的升高而不断增大,超短波相对于短波绕射能力较弱;而对于长度为1 m左右的鞭天线来说,工作在超短波频段的辐射效率要更高,相比于短波近场场强较大。
3.水下无人航行器(underwater unmanned vehicle,uuv)常在水下完成各种探测任务。当收集完成海洋探测后,需要将数据传到接收点。为了保证良好的通信效果,水下无人航行器需要将压载水舱清空,使艇体上浮,通过顶部搭载的鞭天线进行数据传输。考虑到通信过程中的隐蔽性与时效性,很多时候并不会将鞭天线整体全部露出水面,而是仅将鞭天线上端一部分浮出水面,同时选择较高频率(甚高频)的电磁波进行工作。水下无人航行器的常见工作状态如图2所示。海上环境变化无常,常常会出现通信系统建立失败的情况。为了提高接收目标收到信号的幅值,需要使水下无人航行器搭载的鞭天线在浮出一定高度时辐射出最大功率,从而提高接收信号信噪比,减小接收误码率。此时,在近距离的通信过程中,如何选择水下航行器载鞭天线的最佳工作频率成为亟待解决的重要技术问题。
技术实现要素:
4.针对背景技术中提到的现有技术的至少一个缺陷或改进需求,本发明提供一种水下航行器载鞭天线的最佳工作频率确认方法及系统,用以解决现有技术中,在近距离的通信过程中,如何选择水下航行器载鞭天线的最佳工作频率的技术问题。
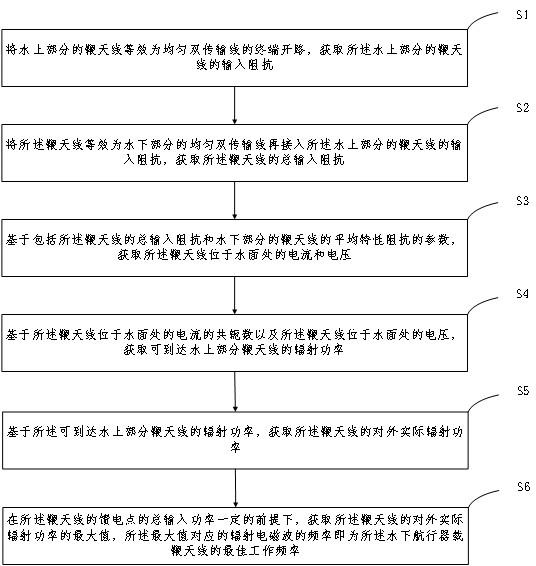
5.第一方面,本发明提供一种水下航行器载鞭天线的最佳工作频率确认方法,包括如下步骤:s1.将水上部分的鞭天线等效为均匀双传输线的终端开路,获取所述水上部分的鞭天线的输入阻抗;s2.将所述鞭天线等效为水下部分的均匀双传输线再接入所述水上部分的鞭天线的输入阻抗,获取所述鞭天线的总输入阻抗;s3.基于包括所述鞭天线的总输入阻抗和水下部分的鞭天线的平均特性阻抗的参数,获取所述鞭天线位于水面处的电流和电压;s4.基于所述鞭天线位于水面处的电流的共轭数以及所述鞭天线位于水面处的电
压,获取可到达水上部分鞭天线的辐射功率;s5.基于所述可到达水上部分鞭天线的辐射功率,获取所述鞭天线的对外实际辐射功率;s6.在所述鞭天线的馈电点的总输入功率一定的前提下,获取所述鞭天线的对外实际辐射功率的最大值,所述最大值对应的辐射电磁波的频率即为所述水下航行器载鞭天线的最佳工作频率。
6.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,随着所述鞭天线浸入水中的深度逐渐增大,所述鞭天线的对外实际辐射功率会逐渐减小,所述鞭天线的最佳工作频率会逐渐增大。
7.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,所述获取所述水上部分的鞭天线的输入阻抗的公式具体为:;其中,z
01
为水上部分的鞭天线的平均特性阻抗,α1为第一衰减常数,β1为第一相移常数,l1为所述鞭天线露出水面部分的长度,th为双曲正切函数,z
in
(0)为所述水上部分的鞭天线的输入阻抗。
8.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,所述获取所述鞭天线的总输入阻抗的公式具体为:;其中,z
02
为水下部分的鞭天线的平均特性阻抗,α2为第二衰减常数,β2为第二相移常数,l2为所述鞭天线浸入水中部分的长度,z
in
(﹣l2)为所述鞭天线的总输入阻抗。
9.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,所述基于包括所述鞭天线的总输入阻抗和水下部分的鞭天线的平均特性阻抗的参数,获取所述鞭天线位于水面处的电流和电压的公式具体为:;其中,u(0)为所述鞭天线位于水面处的电压,i(0)为所述鞭天线位于水面处的电流,u(﹣l2)为所述鞭天线的馈电点输入的电压,为所述鞭天线的馈电点输入的电流。
10.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,所述基于所述鞭天线位于水面处的电流的共轭数以及所述鞭天线位于水面处的电压,获取可到达水上部分鞭天线的辐射功率的公式具体为:;
其中,p
in
(0)为可到达水上部分鞭天线的辐射功率,为所述鞭天线位于水面处的电流i(0)的共轭数。
11.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,所述基于所述可到达水上部分鞭天线的辐射功率,获取所述鞭天线的对外实际辐射功率的公式具体为:;其中,pr(f)为所述鞭天线的对外实际辐射功率,f为对应的辐射电磁波的频率,re为取复数p
in
(0)的实部。
12.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,在所述鞭天线的馈电点的总输入功率一定的前提下,获取所述鞭天线的对外实际辐射功率pr(f)的最大值,所述pr(f)取最大值时对应的辐射电磁波的频率f
best
即为所述的水下航行器载鞭天线的最佳工作频率。
13.根据本发明提供的水下航行器载鞭天线的最佳工作频率确认方法,所述pr(f)取最大值时所述鞭天线的对外实际辐射效率为,p
in
(﹣l2)为所述鞭天线的馈电点的总输入功率。
14.第二方面,本发明提供一种水下航行器载鞭天线的最佳工作频率确认系统,该系统能够实现上述任一项所述的水下航行器载鞭天线的最佳工作频率确认方法的步骤。
15.本发明所构思的技术方案与现有技术相比具有以下有益效果:本发明通过将水下航行器载有的鞭天线的水上和水下部分均等效为均匀双传输线,从而计算出水上部分的鞭天线的输入阻抗和鞭天线的总输入阻抗,并通过有耗传输线理论的电流电压分布可获取可到达水上部分鞭天线的辐射功率,最后,在鞭天线的馈电点的总输入功率一定的前提下,可获取鞭天线的对外实际辐射功率的最大值时对应的辐射电磁波的频率,即为水下航行器载鞭天线的最佳工作频率。通过以上方法获取了最佳工作频率,从而在鞭天线馈电点的总输入功率较小且鞭天线长度较短的前提下,尽可能地提升了鞭天线的对外实际辐射功率,从而提高了接收信号的信噪比,减小了接收误码率,保证了最大概率的通信,提升了近距离超短波通信的可靠性,对小型化无人艇的超短波通信具有很大的战略意义。
附图说明
16.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面的附图是本发明的一些较佳实施例的附图,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
17.图1是本发明实施例提供的水下航行器载鞭天线的最佳工作频率确认方法的流程图;图2是本发明实施例提供的水下航行器载鞭天线不完全浮出水面进行通信的状态示意图;图3是本发明实施例提供的水上部分的鞭天线的模型示意图;
图4是本发明实施例提供的将水上部分的鞭天线等效为均匀双传输线的终端开路的电路示意图;图5是本发明实施例提供的将水下部分的鞭天线等效为均匀双传输线的终端接负载的电路示意图;图6是本发明实施例提供的鞭天线仿真模型示意图;图7是本发明实施例提供的鞭天线仿真结果图之一;图8是本发明实施例提供的鞭天线仿真结果图之二;图9是本发明实施例提供的鞭天线仿真结果图之三;图10是本发明实施例提供的适于实现上文描述的方法的电子设备的方框示意图。
具体实施方式
18.为使本发明的目的、技术方案和优点更加清楚,下面将结合一些附图对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.如图2所示,可以看出,鞭天线全长为l,露出水面部分的长度为l1,在水中的长度为l2。为计算出鞭天线浮出水面一定高度时的输入阻抗,并确定辐射到外场的辐射功率,需要考虑天线在自由空间部分的阻抗,并结合水介质中传输线上电压、电流波传播的相波长,求出两部分对应的等效电路,获得馈电点的输入阻抗,计算出最大的辐射功率,从而找到对应的最佳工作频率。
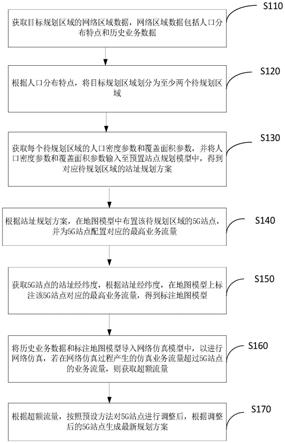
20.第一方面,如图1所示,在一个实施例中提供一种水下无人航行器载鞭天线的最佳工作频率确认方法,包括如下s1
‑ꢀ
s6的步骤:s1.将水上部分的鞭天线等效为均匀双传输线的终端开路,获取所述水上部分的鞭天线的输入阻抗。
21.在鞭天线的阻抗计算中,鞭天线上的电流的分布并非是理想的正弦分布,在电流波传播的过程中,鞭天线不断地向外辐射能量,产生辐射损耗。为了准确计算其阻抗,可以利用传输线理论,将鞭天线看作是具有平均特性阻抗的有损耗的传输线。鞭天线在工作过程中,会与其镜像构成一个全长为两倍天线长度的对称阵子,建立的水上部分鞭天线模型如图3所示,以水面为原点o(坐标值为0),竖直向上为正方向,建立数轴。
22.对于传统的均匀双传输线,特性阻抗为。
23.其中μr为介质的相对磁导率(空气介质中取1),为相对介电常数(空气介质中取1),d为均匀双传输线之间的距离,a为导线横截面的半径。此时,位于水面之上的空气中的鞭天线的一个天线元dz对应的特性阻抗应为(为均匀双传输线特性阻抗的1/2,z表示天线元距海面的距离),在不同位置对应的特性阻抗值有所不同,对水上部分的鞭天线长度l1进行积分,可以获得水上部分的鞭天线的平均特性阻抗为:
鞭天线在工作时的辐射功率可看作是水上部分单位长度损耗电阻r1损耗功率的积分,此时损耗功率应等于辐射功率,i(z)为水上部分天线距水面o点距离为z对应的电流值,im为水上部分天线的电流峰值。
24.由前述的公式经推导可得出,;为水上部分鞭天线的辐射电阻,λ即为鞭天线所辐射的电磁波的波长;β1为水上部分有耗传输线的相移常数,即第一相移常数,其值为。
25.可以将水上部分的鞭天线等效为均匀双传输线的终端开路情况,其等效电路示意图如图4所示。
26.可以得到,水上部分的鞭天线的任意一点的输入阻抗为:;其中表示由水上部分单位长度的分布电阻导致的天线衰减常数,即为第一衰减常数。此时,可以求出水上部分的鞭天线(坐标值为从0到l1的鞭天线)的输入阻抗为:;其中,z
01
为水上部分的鞭天线的平均特性阻抗,α1为上述的第一衰减常数,β1为上述的第一相移常数,l1为所述鞭天线露出水面部分的长度,th为双曲正切函数tanh的缩写,双曲正切函数(tanh)是双曲正弦函数(sinh)与双曲余弦函数(cosh)的比值,其解析形式为:。
27.s2.将所述鞭天线等效为水下部分的均匀双传输线再接入所述水上部分的鞭天线的输入阻抗,获取所述鞭天线的总输入阻抗。
28.对于浸入水中的鞭天线,此处以海水为例,由于海水有较好的导电性(海水的相对介电常数取80,相对磁导率取1),鞭天线的特性阻抗也会发生改变,同样的,将海水水面以下部分等效为在海水介质中的双传输线,参考式前述水上部分的计算过程,水下部分的鞭天线的平均特性阻抗可表示为:
;水下部分单位长度损耗电阻为:;水下部分有耗传输线的相移常数,即第二相移常数为:;水下部分单位长度的分布电阻导致的天线衰减常数,即第二衰减常数为:;水下部分鞭天线的辐射电阻;此时,可以将整个鞭天线看作为在海水介质中的双传输线接一负载阻抗z
in
(0),使天线处在行驻波工作状态,此时,其等效电路如图5所示。从鞭天线位于海面以下的馈电点处至海面以上的鞭天线末端看去,鞭天线(坐标值从位于海面以下的馈电点处的坐标值﹣l2开始)的总输入阻抗为:其中,z
02
为水下部分的鞭天线的平均特性阻抗,α2为上述的第二衰减常数,β2为上述的第二相移常数,l2为所述鞭天线浸入水中部分的长度。
29.s3.基于包括所述鞭天线的总输入阻抗和水下部分的鞭天线的平均特性阻抗的参数,获取所述鞭天线位于水面处的电流和电压。
30.考虑到在鞭天线的总输入功率一定的情况下,水下部分的天线的辐射能量很难传递到水面上,若要求水上部分的天线辐射出最大功率,此时对应的最佳工作频率应综合考虑两个方面:1、能够到达水上部分的天线的最大功率对应的工作频率;2、水上部分的天线接收到水下部分的天线传递的功率后,能辐射出的最大功率对应的工作频率。而往往这两个工作频率并不相等,这说明需要综合考虑能量从水下部分的鞭天线底部传递到水上部分的天线,并由水上部分的天线辐射出去的整个过程,即天线最佳工作频率的优化问题。
31.对于水上部分的天线的接收功率问题,令水下鞭天线馈电点输入的电压为u(﹣l2),可得水下馈电点电流为,此时在海面o处的电压电流值为:;其中,u(0)为所述鞭天线位于水面处的电压,i(0)为所述鞭天线位于水面处的电
流,u(﹣l2)为所述鞭天线的馈电点输入的电压,为所述鞭天线的馈电点输入的电流。
32.s4.基于所述鞭天线位于水面处的电流的共轭数以及所述鞭天线位于水面处的电压,获取可到达水上部分鞭天线的辐射功率。
33.此时,可由o点的电压、电流值求得该点的复功率,输入总功率为,则可到达水上部分鞭天线的辐射功率的公式具体为:;其中,p
in
(0)为可到达水上部分鞭天线的辐射功率,为所述鞭天线位于水面处的电流i(0)的共轭数。此时的复数p
in
(0)并非代表天线能辐射出的功率,其实数部分为天线的辐射功率,虚数部分表示在水上部分的天线进行能量传递时所损失的一部分功率。
34.s5.基于所述可到达水上部分鞭天线的辐射功率,获取所述鞭天线的对外实际辐射功率,公式具体为:;其中,pr(f)为所述鞭天线的对外实际辐射功率,f为对应的辐射电磁波的频率,re为取复数p
in
(0)的实部。
35.s6.在所述鞭天线的馈电点的总输入功率一定的前提下,获取所述鞭天线的对外实际辐射功率pr(f)的最大值,所述pr(f)取最大值时对应的辐射电磁波的频率f
best
即为所述的水下航行器载鞭天线的最佳工作频率;即为所述水下航行器载鞭天线的最佳工作波长,c即为真空中电磁波的波速。pr(f)取最大值时所述鞭天线的对外实际辐射效率为,p
in
(﹣l2)为所述鞭天线的馈电点的总输入功率。
36.借助feko电磁仿真软件,建立水下无人航行器的鞭天线模型。为了避免天线裸漏与海水接触受到影响,在天线外侧填充0.05 mm的聚乙烯绝缘层。仿真模型如图6所示。设鞭天线的总长度为1 m,导线半径为3 mm,分别将天线置入海面下方0.25 m、0.5 m、0.75 m,参考1 m理想鞭天线的谐振频率为75 mhz,初步将仿真实验的频率设定在75-150 mhz的频段内,从而观察其辐射到外场的辐射功率并与计算值进行对比。在不考虑鞭天线前端传输线匹配的情况下,设置输入到天线的功率为10 w。需要注意的是,观察天线的反射系数是无意义的,因为其表示的是整个鞭天线的匹配程度,反射系数的最小值表示天线处于谐振状态,但忽略了海水对水下部分天线辐射功率的吸收能力。仿真结果如图7-9所示。
37.为了更加准确地验证理论推导的正确性,总结出水下无人航行器搭载鞭天线浮出水面时工作的一般规律,制作了天线实物模型并建立了通信系统,来进行实际的测量验证。为了监测天线浸入海水深度对辐射效率的影响,分别将天线浸入0.25 m、0.5 m和0.75 m,由于天线的辐射功率很难通过测量求得具体值,所以采用环天线装置在距离发射点500 m
的位置接收信号。根据鞭天线的基础特性,理论上在75-150 mhz,1 m鞭天线的方向图形状几乎没有改变,故辐射功率增大,接收信号也会相应增大,可间接采用接收场强值证明辐射功率变化的一致性。设置输入到天线的功率为10 w。考虑到实际发射天线会有一定的功率反射回来,需要使用网络分析仪计算出其反射系数,来保证其输入到天线底部的功率为10 w,测得500 m外的接收场强如表1所示。
频率(mhz)浸入深度:0.25m场强值(mv/m)浸入深度:0.50m场强值(mv/m)浸入深度:0.75m场强值(mv/m)7519.834.430.6428024.475.240.6478536.635.310.6529036.045.360.6689535.176.340.67010033.136.510.67210526.877.890.67411022.197.250.67811518.776.460.68212016.376.310.68412514.375.790.70613012.355.670.71813511.304.120.69314010.143.340.6311459.272.240.5871508.435.080.526
38.表1 不同浸入深度时在500 m处的接收场强可以看出,随着天线浸入海水中的深度不断增加,接收场强不断减小,这表明天线辐射到外场的功率相应减小。同时,最佳工作频率逐渐增大(某一深度的最大场强值所对应的频率值随浸入深度的增加而逐渐增大),这与计算和仿真的结果保持了良好的一致性,但其中仍有所偏差,原因可能是海水环境不够大,导致天线的在海水中的阻抗与理想情况下的阻抗有一定偏差,但最佳工作频率仍与理想值保持着相同的变化趋势。
39.最佳工作频率随浸入深度的增加而增大,说明了海水介质不仅吸收了水下部分的天线的辐射功率,同样也改变了天线的阻抗值。因此需要考虑天线输入功率到达水上部分的天线的功率分量,以及水上部分的天线能辐射出的最大功率,从而确定其相应的最佳工作频率,从而为近海面天线的工作提供了应用基础和理论依据。
40.第二方面,在一个实施例中,本发明提供一种水下无人航行器载鞭天线的最佳工作频率确认系统,该系统能够实现上述任一项所述的水下无人航行器载鞭天线的最佳工作频率确认方法的步骤。
41.第三方面,在一个实施例中,图10示意性示出了根据本公开实施例的适于实现上文描述的方法的电子设备的方框图。图10示出的电子设备仅仅是一个示例,不应对本公开实施例的功能和使用范围带来任何限制。
42.如图10所示,本实施例中所描述的电子设备1000,包括:处理器1001,其可以根据存储在只读存储器(rom)1002中的程序或者从存储部分1008加载到随机访问存储器(ram)1003中的程序而执行各种适当的动作和处理。处理器1001例如可以包括通用微处理器(例如cpu)、指令集处理器和/或相关芯片组和/或专用微处理器(例如,专用集成电路(asic)),等等。处理器1001还可以包括用于缓存用途的板载存储器。处理器1001可以包括用于执行
根据本公开实施例的方法流程的不同动作的单一处理单元或者是多个处理单元。
43.在ram 1003中,存储有系统1000操作所需的各种程序和数据。处理器1001、rom 1002以及ram 1003通过总线1004彼此相连。处理器1001通过执行rom 1002和/或ram 1003中的程序来执行根据本公开实施例的方法流程的各种操作。需要注意,所述程序也可以存储在除rom 1002和ram 1003以外的一个或多个存储器中。处理器1001也可以通过执行存储在所述一个或多个存储器中的程序来执行根据本公开实施例的方法流程的各种操作。
44.根据本公开的实施例,电子设备1000还可以包括输入/输出(i/o)接口1005,输入/输出(i/o)接口1005也连接至总线1004。系统1000还可以包括连接至i/o接口1005的以下部件中的一项或多项:包括键盘、鼠标等的输入部分1006;包括诸如阴极射线管(crt)、液晶显示器(lcd)等以及扬声器等的输出部分1007;包括硬盘等的存储部分1008;以及包括诸如lan卡、调制解调器等的网络接口卡的通信部分1009。通信部分1009经由诸如因特网的网络执行通信处理。驱动器1010也根据需要连接至i/o接口1005。可拆卸介质1011,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器1010上,以便于从其上读出的计算机程序根据需要被安装入存储部分1008。
45.根据本公开实施例的方法流程可以被实现为计算机软件程序。例如,本公开的实施例包括一种计算机程序产品,其包括承载在计算机可读存储介质上的计算机程序,该计算机程序包含用于执行流程图所示的方法的程序代码。在这样的实施例中,该计算机程序可以通过通信部分1009从网络上被下载和安装,和/或从可拆卸介质1011被安装。在该计算机程序被处理器1001执行时,执行本公开实施例的系统中限定的上述功能。根据本公开的实施例,上文描述的系统、设备和模块等可以通过计算机程序模块来实现。
46.第四方面,在一个实施例中,本发明还提供了一种计算机可读存储介质,该计算机可读存储介质可以是上述实施例中描述的设备/系统中所包含的;也可以是单独存在,而未装配入该设备/系统中。上述计算机可读存储介质承载有一个或者多个程序,当上述一个或者多个程序被执行时,实现根据本公开实施例的方法。
47.根据本公开的实施例,计算机可读存储介质可以是非易失性的计算机可读存储介质,例如可以包括但不限于:便携式计算机磁盘、硬盘、随机访问存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本公开的实施例中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。例如,根据本公开的实施例,计算机可读存储介质可以包括上文描述的rom 1002和/或ram 1003以外的一个或多个存储器。
48.需要说明的是,在本发明各个实施例中的各功能模块可以集成在一个处理模块中,也可以是各个模块单独物理存在,也可以两个或两个以上模块集成在一个模块中。上述集成的模块既可以采用硬件的形式实现,也可以采用软件功能模块的形式实现。所述集成的模块如果以软件功能模块的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来。
49.附图中的流程图或框图,图示了按照本公开各种实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框或步骤
可以代表一个模块、程序段或代码的一部分,上述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。还要注意的是,框图或流程图中的每个方框、以及框图或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
50.本领域技术人员可以理解,本公开的各个实施例和/或权利要求中记载的特征可以进行多种组合和/或结合,即使这样的组合或结合没有明确记载于本公开中。特别地,在不脱离本公开精神和教导的情况下,本公开的各个实施例和/或权利要求中记载的特征可以进行多种组合和/或结合,所有这些组合和/或结合均落入本公开的范围。
51.尽管已经参照本公开的特定示例性实施例示出并描述了本公开,但是本领域技术人员应该理解,在不背离所附权利要求及其等同物限定的本公开的精神和范围的情况下,可以对本公开进行形式和细节上的多种改变。因此,本公开的范围不应该限于上述实施例,而是应该不仅由所附权利要求来进行确定,还由所附权利要求的等同物来进行限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。