技术特征:
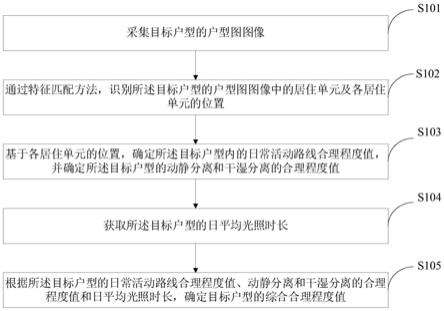
1.基于图像匹配的户型合理度评判方法,其特征在于,包括:采集目标户型的户型图图像;通过特征匹配方法,识别所述目标户型的户型图图像中的居住单元及各居住单元的位置;基于各居住单元的位置,确定所述目标户型内的日常活动路线合理程度值,并确定所述目标户型的动静分离和干湿分离的合理程度值;获取所述目标户型的日平均光照时长;根据所述目标户型的日常活动路线合理程度值、动静分离和干湿分离的合理程度值和日平均光照时长,确定目标户型的综合合理程度值。2.如权利要求1所述的基于图像匹配的户型合理度评判方法,其特征在于,所述基于各居住单元的位置,确定所述目标户型内的日常活动路线合理程度值,包括:基于各居住单元的位置以及住户的通用生活习惯,确定住户在所述目标户型内的日常活动路线;根据所述日常活动路线,确定两两居住单元之间的路程距离以及每日内住户从每个居住单元移动到其他居住单元的每条路线的日活动重复次数;根据所述两两居住单元之间的路程距离以及每条路线的日活动重复次数,确定所述目标户型内的日常活动路线合理程度值。3.如权利要求2所述的基于图像匹配的户型合理度评判方法,其特征在于,所述根据所述两两居住单元之间的路程距离以及每条路线的日活动重复次数,确定所述目标户型内的日常活动路线合理程度值,包括:根据以下第一公式计算所述目标户型的日常活动路线合理程度值:其中i≠j其中,λ1表示所述目标户型的日常活动路线合理程度值;l
i,j
表示所述目标户型中的第i个居住单元和第j个居住单元之间的路程距离;k
i,j
表示每日内住户从所述目标户型中的第i个居住单元移动到第j个居住单元的这条路线的日活动重复次数;表示取括号内的最大值函数;i=1,2,
…
,n;j=1,2,
…
,n;n表示所述目标户型中居住单元的总数;i≠j表示所述第一公式需要在i≠j的情况下进行计算。4.如权利要求3所述的基于图像匹配的户型合理度评判方法,其特征在于,在所述基于各居住单元的位置以及住户的通用生活习惯,确定住户在所述目标户型内的日常活动路线之前,还包括:获取海量住户在与所述目标户型具有相同居住单元种类及数量的房屋内的日生活习惯,作为样本数据;对所述样本数据进行统计,得到住户的通用生活习惯。5.如权利要求3或4所述的基于图像匹配的户型合理度评判方法,其特征在于,所述居住单元至少包括:卧室、客厅、厨房、卫生间、餐厅;所述确定所述目标户型的动静分离和干湿分离的合理程度值,包括:
根据以下第二公式计算目标户型的动静分离和干湿分离的合理程度值:其中,λ2表示目标户型的动静分离和干湿分离的合理程度值;s
max
表示卧室、客厅、厨房、卫生间、餐厅两两之间的直线距离中的最大直线距离;s
a,b
表示卧室和客厅之间的直线距离;s
a,c
表示卧室和厨房之间的直线距离;s
a,d
表示卧室和卫生间之间的直线距离;s
a,e
表示卧室和餐厅之间的直线距离;s
b,c
表示客厅和厨房之间的直线距离;s
b,d
表示客厅和卫生间之间的直线距离。6.如权利要求5所述的基于图像匹配的户型合理度评判方法,其特征在于,所述根据所述目标户型的日常活动路线合理程度值、动静分离和干湿分离的合理程度值和日平均光照时长,确定目标户型的综合合理程度值,包括:根据以下第三公式计算目标户型的综合合理程度值:其中,λ表示目标户型的综合合理程度值;t表示所述目标户型的日平均光照时长,t表示一天的时长,t0表示国家规定的户型一天内的最短光照时长,t、t和t0的单位相同;u()表示非负判定函数,若括号内的数值为非负数则函数值为1,反之为0。7.基于图像匹配的户型合理度评判装置,其特征在于,包括:采集模块,用于采集目标户型的户型图图像;识别模块,用于通过特征匹配方法,识别所述目标户型的户型图图像中的居住单元及各居住单元的位置;第一计算模块,用于基于各居住单元的位置,确定所述目标户型内的日常活动路线合理程度值,并确定所述目标户型的动静分离和干湿分离的合理程度值;光照时长获取模块,用于获取所述目标户型的日平均光照时长;第二计算模块,用于根据所述目标户型的日常活动路线合理程度值、动静分离和干湿分离的合理程度值和日平均光照时长,确定目标户型的综合合理程度值。8.如权利要求7所述的基于图像匹配的户型合理度评判装置,其特征在于,所述第一计算模块,包括:第一合理程度计算子模块和第二合理程度计算子模块;所述第一合理程度计算子模块,包括:路线确定单元、重复次数确定单元和日常活动路线合理程度计算单元;所述路线确定单元,用于先基于各居住单元的位置以及住户的通用生活习惯,确定住户在所述目标户型内的日常活动路线;所述重复次数确定单元,用于根据所述日常活动路线,确定两两居住单元之间的路程距离以及每日内住户从每个居住单元移动到其他居住单元的每条路线的日活动重复次数;所述日常活动路线合理程度计算单元,用于根据所述两两居住单元之间的路程距离以及每条路线的日活动重复次数,通过以下第一公式计算所述目标户型的日常活动路线合理程度值:
其中i≠j其中,λ1表示所述目标户型的日常活动路线合理程度值;l
i,j
表示所述目标户型中的第i个居住单元和第j个居住单元之间的路程距离;k
i,j
表示每日内住户从所述目标户型中的第i个居住单元移动到第j个居住单元的这条路线的日活动重复次数;表示取括号内的最大值函数;i=1,2,
…
,n;j=1,2,
…
,n;n表示所述目标户型中居住单元的总数;i≠j表示所述第一公式需要在i≠j的情况下进行计算;所述第二合理程度计算子模块,用于确定所述目标户型的动静分离和干湿分离的合理程度值。9.如权利要求8所述的基于图像匹配的户型合理度评判装置,其特征在于,所述居住单元至少包括:卧室、客厅、厨房、卫生间、餐厅;所述第二合理程度计算子模块,具体用于根据以下第二公式计算目标户型的动静分离和干湿分离的合理程度值:其中,λ2表示目标户型的动静分离和干湿分离的合理程度值;s
max
表示卧室、客厅、厨房、卫生间、餐厅两两之间的直线距离中的最大直线距离;s
a,b
表示卧室和客厅之间的直线距离;s
a,c
表示卧室和厨房之间的直线距离;s
a,d
表示卧室和卫生间之间的直线距离;s
a,e
表示卧室和餐厅之间的直线距离;s
b,c
表示客厅和厨房之间的直线距离;s
b,d
表示客厅和卫生间之间的直线距离。10.如权利要求9所述的基于图像匹配的户型合理度评判方法,其特征在于,所述第二计算模块,具体用于根据以下第三公式计算目标户型的综合合理程度值:其中,λ表示目标户型的综合合理程度值;t表示所述目标户型的日平均光照时长,t表示一天的时长,t0表示国家规定的户型一天内的最短光照时长,t、t和t0的单位相同;u()表示非负判定函数,若括号内的数值为非负数则函数值为1,反之为0。
技术总结
本发明的实施例公开基于图像匹配的户型合理度评判方法及装置,涉及图像分析技术领域。所述方法包括:采集目标户型的户型图图像;通过特征匹配方法,识别所述目标户型的户型图图像中的居住单元及各居住单元的位置;基于各居住单元的位置,确定所述目标户型内的日常活动路线合理程度值,并确定所述目标户型的动静分离和干湿分离的合理程度值;获取所述目标户型的日平均光照时长;根据所述目标户型的日常活动路线合理程度值、动静分离和干湿分离的合理程度值和日平均光照时长,确定目标户型的综合合理程度值。本发明不仅能自动化、准确的给出户型合理程度,同时能有效地减少评判所需的人力物力。人力物力。人力物力。
技术研发人员:余丹 唐霆岳 兰雨晴 王丹星 邢智涣
受保护的技术使用者:慧之安信息技术股份有限公司
技术研发日:2021.11.23
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。