1.本发明涉及图像识别技术领域,特别涉及一种停车检测计费方法、存储介质及系统。
背景技术:
2.目前,车辆停在路边的收费停车位之后,通常是依靠人工进行停车计费,若停车位数量较多,则人工计费容易出错。
3.现有一种停车计费系统,其设有朝向停车位的摄像头,在车辆进入停车位时,利用摄像头拍摄该车辆的车牌信息,然后根据拍摄到的车牌信息开始进行停车计费。但是,车辆在驶入停车位后,摄像头可能会拍摄不到该车辆的车牌信息,例如摄像头被遮挡、摄像头逆光拍摄等,这样,在车辆驶入停车位之后,现有的停车计费系统会因拍摄不到该车辆的车牌信息而不进行停车计费。
技术实现要素:
4.本发明要解决的技术问题是在朝向停车位的摄像头拍摄不到车辆的车牌信息的情况下,如何准确地进行停车计费。
5.为解决上述技术问题,发明人曾设想令停车计费系统在检测到有车辆驶入停车位时,无论朝向停车位的摄像头是否拍摄到该车辆的车牌信息,停车计费系统都开始进行停车计费,这样就能避免因拍摄不到车辆的车牌信息而不进行停车计费,但是,停在相邻停车位的车辆可能会有一部分车体伸入本停车位中,甚至行人或其他非车辆物体也可能会误入本停车位,在这些情形下摄像头拍摄不到车牌信息,但停车计费系统可能会就本停车位进行停车计费,这无疑是不合理的。对此,发明人改进得到以下技术方案:
6.一种停车检测计费方法,包括如下步骤:
7.a.实时检测是否有物体进入停车位,若检测出有物体进入停车位,则执行下述步骤b;
8.b.采用朝向所述停车位的第一摄像设备拍摄得到停车位图像;
9.c.根据所述停车位图像分析已进入停车位的物体的类型,若分析出已进入停车位的物体是车辆,则执行步骤d,所述步骤d包括下述步骤d1、d2;
10.d1.发出采用第二摄像设备拍摄该车辆的车牌图像的拍摄指令;
11.d2.获取所述第二摄像设备拍摄得到的车牌图像,从所述车牌图像中识别车牌信息;
12.e.根据识别到的车牌信息进行停车计费。
13.优选地,所述步骤c中,若分析出已进入停车位的物体是作为障碍物的车体局部或其他障碍物,则不执行所述步骤d、e,改为执行步骤f.为所述停车位发出障碍物清理指令。
14.优选地,所述步骤c中,若分析出已进入停车位的物体是不属于障碍物的行人,则不执行所述步骤d、e。
15.优选地,包括在所述步骤b之后、所述步骤c之前执行的步骤c0.从所述停车位图像中识别车牌信息,若识别到车牌信息,则跳过所述步骤c、d,直接执行所述步骤e。
16.优选地,所述步骤d包括在步骤d1、d2之前执行的步骤d0.从所述停车位图像中识别车牌信息,若识别到车牌信息,则跳过所述步骤d1、d2,直接执行所述步骤e。
17.优选地,所述步骤b具体地:采用朝向所述停车位的第一摄像设备按照第一预设时间间隔进行连续拍摄,得到连续的多张停车位图像;包括在所述步骤b之后、所述步骤c之前执行的步骤b0.根据连续的多张停车位图像分析已进入停车位的物体是否正在移动,若分析出已进入停车位的物体正在移动,则执行下述步骤b1;b1.继续执行所述步骤b和所述步骤b0,直至分析出该物体已停止移动,才执行所述步骤c。
18.优选地,在执行所述步骤a之前,若接收到用户输入的定时拍摄指令,则跳过所述步骤a,直接执行所述步骤b,所述步骤b具体地:采用朝向所述停车位的第一摄像设备按照第二预设时间间隔进行拍摄,得到分别对应不同时间点的多张停车位图像;所述步骤c中,具体根据分别对应不同时间点的多张停车位图像分析已进入停车位的物体的类型。
19.优选地,所述步骤d1具体地:发出采用不朝向所述停车位的第二摄像设备拍摄所述车辆的车牌图像的拍摄指令。
20.优选地,所述步骤d1具体地:向工作人员的设备发出人工拍摄指令。
21.优选地,所述第二摄像设备是工作人员的带有摄像镜头的移动智能设备;所述步骤d1具体地:向所述移动智能设备发出人工拍摄指令;所述步骤d2具体地:从所述移动智能设备获取其拍摄得到的车牌图像,从所述车牌图像中识别车牌信息。
22.优选地,包括在停车计费开始后执行的步骤g.实时检测停车位中的车辆是否离开,若检测出该车辆已离开,则结束停车计费。
23.本发明还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的停车检测计费方法中的步骤。
24.本发明还提供一种停车检测计费系统,包括服务器、物体检测设备和第一摄像设备,所述物体检测设备设在停车位上,所述第一摄像设备朝向所述停车位,所述服务器分别通信连接所述物体检测设备和所述第一摄像设备;所述服务器包括相互连接的计算机可读存储介质及处理器,计算机可读存储介质如上所述;所述步骤a中,利用所述物体检测设备实时检测是否有物体进入停车位。
25.优选地,所述第一摄像设备是设在停车位上的摄像头。
26.优选地,包括所述第二摄像设备,所述第二摄像设备是工作人员的带有摄像镜头的移动智能设备。
27.优选地,所述物体检测设备是超声波传感器。
28.本发明具有以下有益效果:在有车辆进入停车位时,系统会检测到有物体进入停车位,此时采用常态下朝向停车位的第一摄像设备拍摄得到停车位图像,然后根据该停车位图像分析出已进入停车位的物体是车辆故发出采用常态下不朝向该停车位的第二摄像设备拍摄该车辆的车牌图像的拍摄指令,然后获取第二摄像设备拍摄得到的车牌图像并从中识别车牌信息,再根据识别到的车牌信息进行停车计费。这样,就算朝向停车位的第一摄像设备拍摄不到车辆的车牌信息,也能采用不朝向该停车位的第二摄像设备拍摄得到车辆的车牌信息以进行停车计费。
附图说明
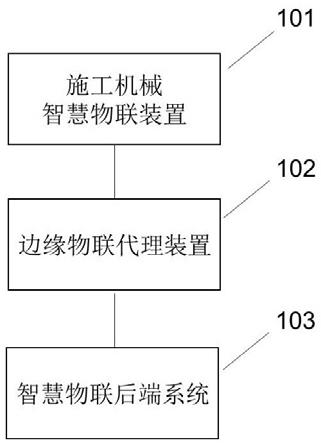
29.图1是停车检测计费系统的示意图;
30.图2是两个相邻停车位的示意图;
31.图3是停车检测计费方法的流程示意图。
32.附图标记说明:1-服务器;2-超声波传感器;3-第一摄像设备;4-第二摄像设备;5-左侧停车位;6-右侧停车位。
具体实施方式
33.以下结合具体实施方式对本发明创造作进一步详细说明。
34.停车检测计费系统如图1所示,包括服务器1、超声波传感器2、第一摄像设备3和第二摄像设备4,该系统适用于路边的收费停车位,其中,超声波传感器2和第一摄像设备3的数量取决于停车位的数量,以有两个相邻停车位为例,超声波传感器2和第一摄像设备3各有两个。见图2,两个相邻停车位分别是左侧停车位5和右侧停车位6,两个超声波传感器2分别设在左侧停车位5和右侧停车位6上,这样,设在左侧停车位5上的超声波传感器2用作左侧停车位5的物体检测设备,设在右侧停车位6上的超声波传感器2用作右侧停车位6的物体检测设备。两个第一摄像设备3具体是分别设在左侧停车位5上和右侧停车位6上的摄像头,设在左侧停车位5上的摄像头在常态下朝向左侧停车位5,设在右侧停车位6上的摄像头在常态下朝向右侧停车位6。本实施例中,第二摄像设备4具体是工作人员所持有的带摄像镜头的移动智能设备,例如手机、平板电脑等,其在常态下不朝向左侧停车位5和右侧停车位6。
35.见图1,服务器1分别通信连接两个超声波传感器2、两个第一摄像设备3和第二摄像设备4,服务器包括相互连接的计算机可读存储介质及处理器,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器执行时实现如图3所示的停车检测计费方法,该方法包括如下步骤a、b、c、d、e。
36.a.实时检测是否有物体进入停车位,若检测出有物体进入停车位,则执行下述步骤b。
37.本实施例中,服务器1采用两个超声波传感器2实时检测是否有物体进入左侧停车位5或右侧停车位6。需要说明的是,超声波传感器2是将超声波信号转换成其它能量信号(通常是电信号)的传感器,其由压电晶片组成,既可以发射超声波,也可以接收超声波;超声波传感器2发射的超声波碰到物体会产生显著反射形成反射回波,超声波传感器2通过检测是否有反射回波来检测是否有物体;超声波传感器2波长越长、频率越小,则检测距离越大,本实施例中,通过调节超声波传感器2的波长和频率,将超声波传感器2的检测范围控制在其所在的停车位内,从而实现利用超声波传感器2来检测是否有物体进入停车位。
38.本实施例中,有车辆进入左侧停车位5,则服务器1经左侧停车位5上的超声波传感器2检测到有物体进入了左侧停车位5,然后针对左侧停车位5执行下述步骤b。
39.b.采用常态下朝向左侧停车位5的第一摄像设备3拍摄得到停车位图像。
40.在检测到有物体进入左侧停车位5之后,服务器1采用常态下朝向左侧停车位5的第一摄像设备3,按照第一预设时间间隔进行连续拍摄,例如每隔1秒就对左侧停车位5进行一次拍摄,共拍摄十次,从而得到连续的十张停车位图像。
41.在拍摄得到连续的十张停车位图像之后,服务器1根据这十张停车位图像分析已进入左侧停车位5的物体在拍摄期间是否正在移动,具体地:若在相邻两个时间点拍摄得到的两张停车位图像当中物体位置不同,则意味着该物体在拍摄期间正在移动;若在相邻两个时间点拍摄得到的两张停车位图像当中物体位置相同,并直到最后一张停车位图像,该物体位置也没有变化,则意味着该物体在拍摄期间已停止移动。在服务器1分析出该物体在拍摄期间正在移动的情况下,服务器1继续采用常态下朝向左侧停车位5的第一摄像设备3,再次按照第一预设时间间隔进行连续拍摄,得到连续的另外十张停车位图像,并根据这另外十张停车位图像分析该物体在拍摄期间是否正在移动,如此重复直至分析出该物体在拍摄期间已停止移动。在服务器1分析出该物体在拍摄期间已停止移动的情况下,服务器1从多张停车位图像中识别车牌信息,若识别到车牌信息即意味着停在左侧停车位5上的物体是车辆,则服务器1直接根据识别到的车牌信息对停在左侧停车位5上的车辆进行停车计费,若识别不到车牌信息则服务器1执行下述步骤c作进一步分析。
42.c.根据停车位图像分析已进入停车位的物体的类型,若分析出已进入停车位的物体是车辆,则执行步骤d,步骤d包括步骤d1、d2。
43.本实施例中,服务器1中预存有多张轮廓图像,其中包含有不同车型的多张车辆轮廓图像和不同姿态的多张行人轮廓图像。服务器1在分析出已进入左侧停车位5的物体停止移动之后,根据最终拍摄得到的停车位图像来分析已进入左侧停车位5的物体的类型,具体地:服务器1先从最终拍摄得到的停车位图像中识别已进入左侧停车位5的物体轮廓,然后将识别出的物体轮廓与预存的各张轮廓图像进行相似度对比,找出相似度最高的轮廓图像并得到具体相似度,再判断该具体相似度是否大于预设阈值(例如80%),若该具体相似度大于预设阈值,则服务器1判定已进入左侧停车位5的物体是相似度最高的轮廓图像所代表的物体,若该具体相似度不大于预设阈值,则服务器1判定已进入左侧停车位5的物体是作为障碍物的车体局部或其他障碍物。
44.本实施例中,进入左侧停车位5的物体是车辆,则服务器1所识别出的物体轮廓会与预存的各张轮廓图像当中的某张车辆轮廓图像相似度最高,且具体相似度会大于预设阈值,故服务器1会判定已进入左侧停车位5的物体是车辆。此情况下,执行步骤d,该步骤d包括步骤d1、d2。
45.d1.发出采用常态下不朝向左侧停车位5的第二摄像设备4拍摄该车辆的车牌图像的拍摄指令。
46.服务器1在分析出已进入左侧停车位5的物体是车辆之后,需要根据该车辆的车牌信息进行停车计费。因此,服务器1向常态下不朝向左侧停车位5的第二摄像设备4(即工作人员所持有的手机、平板电脑等带摄像镜头的移动智能设备)发出采用本设备拍摄该车辆的车牌图像的人工拍摄指令,该人工拍摄指令包含有左侧停车位5的身份信息,工作人员从第二摄像设备4上接收到该人工拍摄指令之后,根据左侧停车位5的身份信息前往左侧停车位5,然后采用第二摄像设备4对停在左侧停车位5上的车辆的车牌进行拍摄,得到该车辆的车牌图像。
47.在其他实施例中,停车检测计费系统还包括不便于移动的工作设备(例如台式电脑),该工作设备通信连接服务器1。这样,服务器1在分析出已进入左侧停车位5的物体是车辆之后,不向第二摄像设备4发出人工拍摄指令,而是向该工作设备发出采用第二摄像设备
4拍摄该车辆的车牌图像的人工拍摄指令,该人工拍摄指令包含有左侧停车位5的身份信息,工作人员从工作设备上接收到该人工拍摄指令之后,手持第二摄像设备4前往左侧停车位5,然后采用第二摄像设备4对停在左侧停车位5上的车辆的车牌进行拍摄,得到该车辆的车牌图像。
48.在其他实施例中,不采用工作人员所持有的带有摄像镜头的移动智能设备作为第二摄像设备4,而是采用常态下分别朝向左侧停车位5和右侧停车位6的两个可转动摄像头作为第二摄像设备4,其中,常态下朝向左侧停车位5的第二摄像设备4可转动至朝向右侧停车位6,常态下朝向右侧停车位6的第二摄像设备4可转动至朝向左侧停车位5,这两个可转动摄像头的转动结构是现有常规结构,在此不赘述。这样,上述步骤d1具体地:服务器1在分析出已进入左侧停车位5的物体是车辆之后,向常态下朝向右侧停车位6的第二摄像设备4发出采用本设备拍摄该车辆的车牌图像的拍摄指令,该常态下朝向右侧停车位6的第二摄像设备4在接收到该拍摄指令之后,转动至朝向左侧停车位5,然后对停在左侧停车位5上的车辆的车牌进行拍摄,得到该车辆的车牌图像。
49.d2.获取第二摄像设备4拍摄得到的车牌图像,从车牌图像中识别车牌信息。
50.在利用第二摄像设备4拍摄得到车牌图像之后,第二摄像设备4将拍摄得到的车牌图像上传到服务器1中,服务器1就获取到第二摄像设备2拍摄得到的车牌图像,然后从该车牌图像中识别停在左侧停车位5上的车辆的车牌信息,然后执行下述步骤e。
51.在其他实施例中,在执行上述步骤b分析出进入左侧停车位5的物体在拍摄期间已停止移动之后,服务器1不从停车位图像中识别车牌信息,而是直至执行步骤d时,在执行步骤d1、d2之前执行用以识别车牌信息的步骤d0,该步骤d0具体地:从停车位图像中识别车牌信息,若识别不到车牌信息则执行上述步骤d1、d2,若识别到车牌信息则跳过上述步骤d1、d2,直接执行下述步骤e。
52.e.根据识别到的车牌信息进行停车计费。
53.服务器1在识别到停在左侧停车位5上的车辆的车牌信息之后,根据该车牌信息对停在左侧停车位5上的车辆进行停车计费。在开始对停在左侧停车位5上的车辆进行停车计费之后,服务器1执行下述步骤g.实时检测左侧停车位5中的车辆是否离开,若检测出该车辆已离开,则结束停车计费。步骤g具体地:在停车计费开始后,服务器1采用左侧停车位5上的超声波传感器2实时检测左侧停车位5中的车辆是否离开,若检测出该车辆已离开,则结束停车计费,也就是说,服务器1从车辆在左侧停车位5上停稳后开始计费,直至该车辆离开左侧停车位5,然后按照该车辆停在左侧停车位5上的时长进行收费。
54.在其他实施例中,若进入左侧停车位5的物体是不属于障碍物的行人,则服务器1所识别出的物体轮廓会与预存的各张轮廓图像当中的某张行人轮廓图像相似度最高,且具体相似度会大于预设阈值,故服务器1会在上述步骤c中分析出已进入左侧停车位5的物体是行人。此情况下,服务器1不执行上述步骤d、e,而是忽略行人,让该行人自己走出左侧停车位5。
55.在其他实施例中,若有车辆进入右侧停车位6,且该车辆因停车不规范而导致其车体局部进入了左侧停车位5,或有人将其他障碍物放在左侧停车位5上,则服务器1所识别出的物体轮廓与预存的各张轮廓图像相似度都不大于预设值,故服务器1会在上述步骤c中分析出已进入左侧停车位5的物体是作为障碍物的车体局部或其他障碍物。此情况下,服务器
1不执行上述步骤d、e,改为执行步骤f.左侧停车位5发出障碍物清理指令。步骤f具体地:服务器1向工作人员所持有的移动智能设备发出障碍物清理指令,该障碍物清理指令包含左侧停车位5的身份信息,工作人员在接收到该障碍物清理指令之后,可根据左侧停车位5的身份信息前往左侧停车位5进行障碍物清理工作,例如通知停在右侧停车位6上的不规范车辆的车主进行挪车,或搬走放在左侧停车位5上的非车辆障碍物。
56.需要说明的是,在下雨或下雪时,雨水或雪花会落入到两个停车位5、6中,从而会影响分别设在两个停车位5、6中的超声波传感器2的检测结果。因此,在下雨或下雪时,工作人员利用其所持有的移动智能设备(即第二摄像设备4)向服务器1输入定时拍摄指令,服务器1在接收到该定时拍摄指令后,停止采用分别设在两个停车位5、6中的超声波传感器2检测是否有物体进入左侧停车位5或右侧停车位6,改为直接采用分别朝向两个停车位5、6的第一摄像设备3,按照第二预设时间间隔分别对两个停车位5、6进行拍摄,例如每隔5分钟就对两个停车位5、6进行一次拍摄,从而得到分别对应不同时间点的多张停车位图像,然后服务器1利用图像识别技术识别是否有物体进入左侧停车位5或右侧停车位6,若有物体进入左侧停车位5,则根据分别对应不同时间点的多张停车位图像分析已进入左侧停车位5的物体的类型,具体分析过程与上述步骤c相同,在此不再赘述。
57.如上所述仅为本发明创造的实施方式,不以此限定专利保护范围。本领域技术人员在本发明创造的基础上作出非实质性的变化或替换,仍落入专利保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。