1.本发明涉及一种超声波医疗装置,更详细地,涉及一种具有手持件和可拆装于手持件并产生超声波的超声波医疗装置用盒的超声波医疗装置。
背景技术:
2.脂肪组织层存在于皮肤的真皮和表皮层下方。由于脂肪团(cellulite)容易在皮下脂肪层产生并且皮下脂肪可能被组织化在连接的组织块包围的特定的腔室内,因此这相比于其他脂肪层是独特的一点。过多的脂肪组织可以成为肥胖、脂肪团、皮肤松弛和皱纹的原因。
3.占据脂肪组织中的大部分的皮下脂肪分为浅脂肪层和深脂肪层。深的脂肪位于腹部、腰臀部以及大腿部的皮下膜与筋膜之间,并形成深的脂肪区域。该深脂肪层表现出明显积蓄在局部地区的倾向。随着年龄的增长而生成的局部脂肪积蓄由于纤维质壁变薄并缺损而在其有限的空间内体积变大。因此,表现出在腰部以下部位突出的倾向。
4.由于过度的脂肪的局部集中,使得皮肤突出地膨胀,不优选的皮肤轮廓可以通过去除脂质丰富的脂肪层来改善皮肤的外部层的形状。
5.近来,作为减少皮下脂肪层或者脂肪组织的非侵入性方法的利用超声波的治疗方法已广为人知。
6.超声波是指具有20khz以上的频率的波,不仅在医疗领域中用于对患部的诊断及治疗,而且还广泛应用于皮肤美容。
7.尤其,作为将超声波以高强度聚焦的形态的高强度聚焦超声波(hifu:high intensity focused ultrasound)与激光及rf(radio frequency)高频设备不同,在不会对皮肤表面产生任何损伤的同时以非侵入性的方式将能量集中于所选择的部分,即,将所释放的超声波聚焦于作为特定地点的焦点来产生热,从而诱发治疗部位的温度急剧上升。通过这种温热功能,不会在各种患部留下副作用,诱导脂肪细胞发生凝固坏死并进行治疗。
8.另外,如果所要治疗的皮肤部位不同,则通过调整超声波的焦点位置来使用这种超声波进行治疗最为有效。即,需要调节换能器的焦点位置,以使从换能器照射的超声波的焦点位置与作为治疗部位的皮下脂肪层相匹配。
9.但是,在现有的超声波产生装置中,产生超声波的换能器的z轴方向的位置被固定,即,从换能器照射的超声波的焦点位置被固定,从而存在无法根据所要治疗的皮肤部位来调节超声波的聚焦深度的问题。因此,存在需要配备具有根据待治疗的皮肤部位的超声波的聚焦深度的多个盒的问题。
10.由此,本技术人开发了一种如下的超声波医疗装置:将超声波产生部(即,换能器)内置于可更换地拆装于手持件的盒,并且不仅可以将从内置于盒的超声波产生部照射的超声波的焦点位置向皮肤中均匀的深度移动,而且超声波的聚焦深度也可以进行可变调节。
11.[现有技术文献]
[0012]
[专利文献]
[0013]
(专利文献1)韩国公开专利公报第10-2013-0106361号(发明名称:hifu填充器,公开日:2013.09.27)
技术实现要素:
[0014]
本发明是为了解决上述问题而提出的,其目的在于提供一种在不影响盒内部体积的情况下,通过调节超声波产生部的深度方向的位置来多样地设定皮肤内的超声波聚焦深度而沿水平方向移动的超声波医疗装置。
[0015]
根据本发明的一实施例的一种超声波医疗装置用盒包括:盒外壳,可拆装地安装于手持件;第一移动部,收容于所述盒外壳,形成有能够在第一轴方向上往复移动的第一移动体;第二移动部,结合于通过所述第一移动部变更在第一轴方向上的位置的所述第一移动体的一侧,并且形成有能够在垂直于所述第一轴方向的第二轴方向上往复移动的第二移动体;以及超声波产生部,结合于所述第二移动体,产生具有特定的聚焦距离的高强度聚焦超声波,其中,所述第二移动部在所述盒内的第一轴方向上的位置通过所述第一移动体的位置移动来设定,所述第二移动部包括:压电马达,由基于电源的电信号所驱动,其中,所述第一移动部及所述第二移动部通过包括在所述手持件或者与所述手持件连接的本体部中的控制部而控制。
[0016]
此外,第一移动部可以结合于所述手持件,可以通过所述手持件内的驱动部提供的动力变更所述第一移动体在第一轴方向上的位置。
[0017]
此外,当利用超声波输出进行治疗时,所述驱动部可以同时执行借由所述第一移动部的所述第一移动体在所述第一轴方向上的位置变更和所述第二移动体在所述第二轴方向上的位置变更。
[0018]
此外,所述电信号可以是rf信号。
[0019]
此外,所述超声波医疗装置用盒还可以包括:移动模块位置测量部,计算所述超声波产生部在所述第二轴方向上的位置。
[0020]
此外,所述超声波医疗装置用盒,其特征在于,还包括:移动模块位置测量部,计算所述超声波产生部在所述第二轴方向上的位置,其中,所述移动模块位置测量部处于与所述第一轴方向平行的位置,并测量与所述超声波产生部的距离。
[0021]
此外,所述超声波医疗装置用盒还包括:移动模块位置测量部,计算所述超声波产生部在所述第二轴方向上的位置,所述移动模块位置测量部包括了光发射部和光接收部,光发射部被设置为在第二轴方向上与所述第二移动体隔开沿所述第二轴方向向所述第二移动体输出感测光,光接收部设置于所述第二移动体而感测所述感测光以测量所述第二移动体与所述光发射部的相对距离,所述移动模块位置测量部基于所测量的相对距离可以计算所述超声波产生部在第二轴方向上的位置。
[0022]
此外,所述第二移动体可以在中央包括贯通孔,所述第二移动部的移动轴穿过所述贯通孔而结合于所述贯通孔。
[0023]
此外,所述超声波医疗装置用盒的特征在于,所述压电马达是结合于所述第一移动体的压电旋转马达,其中,所述压电旋转马达具有在第二轴方向上布置的驱动轴,所述第二移动体可以设置为能够借由所述驱动轴的转动在第二轴方向上往复移动。
[0024]
此外,所述第一移动体为了防止所述第二移动体的旋转而具有支撑所述第二移动
体的引导部,在所述驱动轴形成有沿第二轴方向的螺旋形的螺纹,在所述第二移动体形成有与所述螺纹螺纹结合的螺纹孔,当所述驱动轴转动时,所述第二移动体沿所述螺纹在第二轴方向上移动,从而可以变更所述第二移动体和所述超声波产生部在第二轴方向上的位置。
[0025]
此外,所述超声波医疗装置用盒还可以包括:超声波产生部位置测量部,检测所述超声波产生部在第二轴方向上的位置。
[0026]
此外,所述超声波产生部位置测量部可以设置为在第一轴方向上与所述第二移动体隔开,在所述第二轴方向上向所述第二移动体输出感测光并感测从所述第二移动体反射的反射光,从而测量与所述第二移动体的相对距离,并基于所测量的相对距离计算出所述超声波产生部在第二轴方向上的位置。
[0027]
此外,本发明还可以包括:反射板,在所述第二移动体的所述感测光入射的地点提高所述感测光的反射率。
[0028]
根据本发明一实施例的超声波医疗装置包括:盒;以及手持件,可拆装地安装所述盒,向所述盒传递rf信号及用于驱动第一轴方向的动力。
[0029]
另外,压电马达比现有技术中使用的电动马达尺寸更小且更轻,并且可以不影响在第一轴方向上的移动。对于现有的电动马达而言,由于尺寸大且重量重,因此在移动第一轴时对轴施加负载,并且因多个信号及电源线缆而对轴移动产生干扰,因此存在轴移动不自由的问题。
[0030]
此外,与对水较弱的现有的电动马达相反,压电马达的防水能力高,因而容易用于超声波医疗用盒。
[0031]
所述压电马达可以为压电线性马达或者压电旋转马达,优选地,可以为压电旋转马达。
[0032]
在压电线性马达的情况下,超声波产生部仅通过移动轴的摩擦力来固定,因此,超声波产生部因受重力的影响可能会发生位置变动而脱离所期望的治疗位置,但在压电旋转马达的情况下,具有可以在不受重力的影响的情况下进行精确的深度调节且可以在不干扰第一轴移动及第二轴移动的情况下进行操作的优点。
[0033]
根据本发明的一实施例的超声波医疗装置包括:上述的盒;以及手持件,可拆装地安装有所述盒,向所述盒传递rf信号以及用于第一轴方向的驱动的动力。
[0034]
根据本发明,不仅可以使超声波产生部的超声波的焦点位置平面移动至皮肤内的均匀的深度,而且可以可变地调节超声波的焦点深度。
[0035]
此外,在使用压电马达在深度方向上移动超声波产生部的情况下,可以变更超声波产生部的位置,而不影响盒内部的脱气水空间。由此,可以更简单地制造盒结构,并且可以电控制超声波产生部在盒内部的位置,使得可以更容易地调节使用者的聚焦深度。
附图说明
[0036]
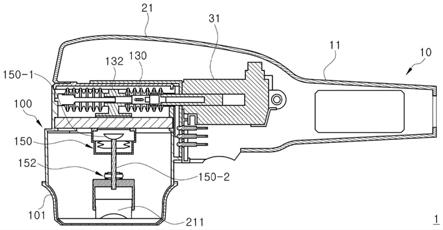
图1是根据本发明的一实施例的利用压电马达来执行深度调节的超声波医疗装置的剖视图。
[0037]
图2是根据本发明的一实施例的还包括用于测量超声波产生部的位置的距离测量传感器的超声波医疗装置的剖视图。
[0038]
图3是根据本发明的一实施例的包括用于测量结合有磁体的超声波产生部的位置的霍尔传感器的超声波医疗装置的剖视图。
[0039]
图4是根据本发明的实现超声波产生部移动的压电马达的电连接结构图。
[0040]
图5是包含于本发明的实施例中的压电马达的示例图。
[0041]
图6是根据本发明的一实施例的超声波医疗装置用盒的剖视图。
[0042]
图7a至图7b是示出根据本发明的一实施例的超声波医疗装置用盒的超声波产生部的第二轴方向移动状态的剖视图。
[0043]
图8至图9是示出根据本发明的一实施例的超声波医疗装置用盒的超声波产生部位置测量部检测超声波产生部的第二轴方向位置的状态的剖视图。
具体实施方式
[0044]
参照结合附图详细后述的实施例,将明确了解本发明的优点和特征、以及用于达到这些的方法。然而,本发明并非局限于以下公开的实施例,其可以实现为彼此不同的多样的形态,提供本实施例仅旨在使本发明的公开得以完整并用于将本发明的范围完整地告知本发明所属的技术领域中具备基本知识的技术人员。
[0045]
本说明书中使用的术语用于说明实施例而非旨在限定本发明。在本说明书中,除非特别说明,否则单数型在语句中也包括复数型。说明书中使用的术语“包括(comprises)”和/或“包含(comprising)”不排除除了所提及的构成要素之外的一个以上的其他构成要素的存在或附加。贯穿说明书全文,相同的附图标记指代相同的构成要素,“和/或”包括所提及的构成要素中的每一个及其一个以上的所有组合。虽然术语“第一”、“第二”等可以用来描述多种构成要素,但是这些构成要素不应该受这些术语的限制。这些术语仅用来将一个构成要素与另一构成要素区别开使用。因此,以下提及的第一构成要素在本发明的技术思想内显然也可以是第二构成要素。
[0046]
只要没有不同的定义,否则在本说明书中使用的所有术语(包括技术术语或科学术语在内)具有与在本发明所属技术领域中具有基本知识的技术人员通常理解的含义相同的含义。此外,除非有明确的特别的定义,否则通常使用的字典中所定义的术语不应被解释为理想或过于形式上的含义。
[0047]
以下,参照附图对本发明的实施例进行详细说明。
[0048]
图1是根据本发明的一实施例的利用压电马达来执行深度调节的超声波医疗装置的剖视图。
[0049]
图2是根据本发明的一实施例的还包括用于测量超声波产生部的位置的距离测量传感器的超声波医疗装置的剖视图。
[0050]
图3是根据本发明的一实施例的包括用于测量结合有磁体的超声波产生部的位置的霍尔传感器的超声波医疗装置的剖视图。
[0051]
图4是根据本发明的实现超声波产生部移动的压电马达的电连接结构图。
[0052]
图5是包含于本发明的实施例中的压电马达的示例图。
[0053]
参照图1至图3,超声波医疗装置1包括手持件10和超声波医疗装置用盒100。
[0054]
手持件10包括把手11和头部21,所述把手11为具有预定长度的棒状以便用手握住,所述头部21从把手11的一端突出且用于可拆装地安装超声波医疗装置用盒100。
[0055]
针对本发明的方向标记,将第一轴方向定义为手持件10的长度方向及x轴方向,将垂直于第一轴方向的第二轴方向定义为z轴方向、上下方向以及深度方向。
[0056]
在把手11容纳有驱动致动器31,所述驱动致动器31用于使超声波医疗装置用盒100的将后述的第一移动部130在第一轴方向上移动。
[0057]
具体地说,驱动部可以包括:第一驱动部,提供用于使后述的第一移动体132在第一轴方向上移动的驱动;以及第二驱动部,提供用于使后述的第二移动体152在第二轴方向上移动的驱动。
[0058]
第一驱动部可以是能够使第一移动体132在第一轴方向上移动的驱动致动器31或者马达,但不特别限于此。
[0059]
第二驱动部可以是向使将后述的第二移动体152在第二轴方向上移动的压电马达提供rf信号的rf产生模块(未图示),但并不特别限于此。
[0060]
此外,在把手11容纳有用于控制驱动致动器31和将后述的超声波产生部211的位置(即,换能器的位置)的控制部(未图示)。
[0061]
在盒100内部追加电控制所需的构成的情况下,控制部也可以控制所追加的构成。
[0062]
在头部21形成有可拆装地安装超声波医疗装置用盒100的拆装部。
[0063]
另外,超声波医疗装置用盒100包括盒外壳101、第一移动部130、第二移动部150、超声波产生部211。
[0064]
盒外壳101具有中空的筒形状,可拆装于手持件10的拆装部。盒外壳101在下部配备有透明窗的同时具有密封的内部空间。为了避免从超声波产生部211照射的超声波损失,盒外壳101收容了超声波损失系数低的介质,作为一例,盒外壳101将脱气水收容于密封的内部空间。
[0065]
所述超声波产生部211起到基于从手持件10提供的rf信号输出聚焦于特定深度的超声波的作用。即,随着超声波医疗装置用盒100与手持件10结合而使手持件10的端子与盒100的端子接触,所述超声波产生部211接收rf信号并输出高强度聚焦超声波(hifu)。例如,超声波产生部211可以通过具有特定的rf值的rf信号来形成超声波在皮肤中的特定聚焦深度。此外,所述超声波产生部211可以构成为半球形状或者半圆柱形状。
[0066]
所述超声波产生部211结合于后述的第二移动部150的第二移动体152,并随着第二移动体152在第二轴方向上移动而在第二轴方向上移动,据此在第二轴方向上的位置可以得到变更。因此,超声波产生部211可以通过第二移动部150在第二轴方向上移动的同时提供超声波,也可以通过第二移动部150移动到设定位置之后提供超声波。
[0067]
另外,在超声波产生部211结合于第二移动体152而移动的情况下,所述超声波产生部211在中央包括贯通孔,所述第二移动部150的移动轴可以穿过所述贯通孔而结合于所述第二移动体152。
[0068]
所述第一移动部130起到使超声波产生部211在第一轴方向(即,x轴方向)上移动的作用。所述第一移动部130收容于所述盒外壳101,并且设置为使第一移动体132在第一轴方向上可移动。
[0069]
作为一实施例,第一移动体132可以通过第一驱动部在第一轴方向上移动,从而可以调节第一轴方向上的位置。例如,在第一驱动部是驱动致动器31的情况下,第一移动体132可以连接于驱动致动器31的杆,并且可以随着驱动致动器31的杆在第一轴方向上的移
动而在第一轴方向上移动。此外,在第一驱动部是马达的情况下,第一移动体132可以连接于马达的旋转螺杆,并且可以通过旋转螺杆的转动在第一轴方向上移动。
[0070]
此外,作为另一实施例,第一移动部130可以由压电马达构成,并且压电马达可以基于从手持件10接收的电流在第一轴方向上自主地移动第一移动体132,从而变更第一移动体132在第一轴方向上的位置。
[0071]
所述第二移动部150起到用于使超声波产生部211在第二轴方向(即,深度方向)上移动的作用。
[0072]
作为一实施例,所述第二移动部150结合于在第一轴方向上的位置通过所述第一移动部130而变更的第一移动体132的一侧,并且设置为第二移动体152能够在垂直于所述第一轴方向的第二轴方向上往复移动。所述第二移动部150在所述盒100内的第一轴方向上的位置通过所述第一移动体132的位置移动来设定。
[0073]
此外,作为一实施例,第二移动部150可以为压电马达。压电马达随着rf频率的提供而使第二移动体152进行线性移动。
[0074]
例如,压电马达可以包括:压电致动器150-1;移动轴150-2,从压电致动器150-1沿第二轴方向延伸;以及第二移动体152,以包围移动轴150-2的外周面的形态形成并通过与移动轴150-2的外周面的摩擦而固定,其中,在第二移动体152的下部可结合有超声波产生部211(参照图1至图3)。
[0075]
对于这样的压电马达而言,如果因从施加电压的频率发生器接收rf信号的压电致动器150-1的形状变化(收缩或者膨胀),移动轴150-2被施加振动,则第二移动体152沿着移动轴150-2移动。如上所述,在第二移动体152沿着移动轴150-2在第二轴方向上移动的情况下,与第二移动体152结合的超声波产生部211也在第二轴方向上移动。超声波产生部211和压电马达可以通过从单独或相同rf模块接收rf信号来被驱动,优选为从单独的rf模块接收rf信号。
[0076]
进一步地,可以以移动轴150-2贯通于第二移动体152的状态而结合,超声波产生部211随着第二移动体152在第二轴方向上移动而在第二轴方向上移动,从而能够变更超声波(即,高强度聚焦超声波)的聚焦深度。
[0077]
第二移动部150可以在第一移动部130的驱动执行期间通过手持件10内控制部的控制在第二轴方向上移动,也可以在第一移动部130的驱动执行之前设置在第二轴方向上的特定位置。
[0078]
在通过超声波输出进行治疗的情况下,所述驱动部可以同时执行借由所述第一移动部130的第一移动体132在第一轴方向上的位置变更和所述第二移动体152在所述第二轴方向上的位置变更。
[0079]
所述第一移动部130及所述第二移动部150通过包括在所述手持件10或者与手持件10连接的本体部中的控制部控制。这样的控制部可以通过控制第一驱动部的驱动来控制第一移动体132在第一轴方向上的移动,并且可以通过控制第二驱动部的驱动来控制第二移动体152在第二轴方向上的移动。
[0080]
作为一实施例,在超声波产生部211的目标位置被设定的情况下,控制部可以通过执行第一移动体132在第一轴方向上移动和第二移动体152在第二轴方向上移动中的至少一个来使超声波产生部211向目标位置移动。其结果,超声波产生部211的高强度聚焦超声
波可以提供至皮肤面下方的目标焦点。
[0081]
接着,控制部使第一移动体132执行在第一轴方向上的移动,从而可以使超声波产生部211沿着第一轴方向的直线路径移动。因此,超声波产生部211的高强度聚焦超声波可以在皮肤面下方沿着第一轴方向的直线路径(即,x轴路径)而被提供。
[0082]
此外,控制部可以使第二移动体152执行在第二轴方向上的移动,从而使超声波产生部211沿着第二轴方向的直线路径移动。因此,超声波产生部211的高强度聚焦超声波可以在皮肤面下方沿着第二轴方向的直线路径(即,z轴路径)而被提供。
[0083]
此外,控制部可以通过同时执行第一移动体132在第一轴方向上的移动和第二移动体152在第二轴方向上的移动来使超声波产生部211沿曲线路径移动。因此,超声波产生部211的高强度聚焦超声波可以在皮肤面下方沿着曲线路径而被提供。
[0084]
如上所述,超声波产生部211在沿着直线路径或曲线路径移动的期间,可连续性地或者周期性地输出高强度聚焦超声波。
[0085]
以下,针对调节超声波产生部211在第二轴方向(即,z轴方向)上的位置来设定超声波在皮肤内部的聚焦深度的多种实施例进行说明。
[0086]
在根据本发明的一实施例的聚焦超声波盒中,所述第二移动部150与第一移动部130结合而移动。例如,作为第二移动部150的压电马达与第一移动部130的第一移动体132一侧(例如,下部面或者侧面)结合,所述第一移动部130借由手持件10的驱动部提供的动力而进行线性移动。
[0087]
具体地说,如图1所示,所述压电马达可以结合于第一移动体132的下部面,并且可以根据第一移动部130的位置变更而变更在盒100内部的位置。即,随着第一移动部130被手持件10的驱动部驱动,压电马达随着第一移动体132的移动而一同移动。即,生成z轴驱动的第二驱动部与第一移动部130的第一移动体132成为一体,并在盒100内的空间移动。
[0088]
所述压电马达使为了输出超声波而结合于与在z轴上的移动路径对应的柱子的超声波产生部211移动。所述压电马达基于所提供的rf强度和时间来变更超声波产生部211结合的移动模块的位置。例如,若所提供的rf强度增加,则压电马达可以使移动模块的移动变快。
[0089]
据此,超声波产生部211在盒100内在z轴方向上的移动不会形成填充有脱气水的空间的体积变化,因此可以在盒100处于密封状态下实现超声波产生部211的移动。即,形成x轴位置变化的第一移动部和形成z轴位置变化的第二移动部在包括于盒100内部空间的状态下,仅发生根据手持件10的驱动部的驱动的第一移动体132的位置变化及根据压电马达的驱动的第二移动体152的位置变化,因此,在进行超声波治疗时,不会发生包含于盒100内的整体结构的体积变化。因此,根据本发明的一实施例的超声波治疗装置可以在具有固定内部体积的盒100填充有预定量的脱气水的状态下实现超声波产生部211在第一轴方向及第二轴方向上的移动。
[0090]
超声波产生部211可以以多种方式结合于通过从压电马达提供的超声波振动在轨道上移动的移动模块。作为一实施例,如图1至图3所示,超声波产生部211在中心形成有孔而直接结合于z轴移动模块下端,从而可根据移动模块的位置变化而布置于能够提供所需的聚焦深度的特定深度。此时,根据超声波产生部211的位置,与移动轨道对应的压电马达的柱子可布置于超声波产生部211的下方,但对于设定超声波聚焦距离(即,根据超声波产
生部211的曲率的聚焦点位置)而言,可实现为不受柱子的影响。
[0091]
此外,作为另一实施例,压电马达的移动模块可以向侧面延伸而布置超声波产生部211。此时,超声波产生部211在z轴上的位置与移动模块的位置相同,但是超声波产生部211在x轴上的平面上位置与移动模块在x轴上的平面上位置不同。例如,相比于压电马达的移动模块的位置,由于超声波产生部211在x轴方向或者在y轴方向上结合于移动模块的侧面,因此存在与所隔开的距离对应的差异。
[0092]
此外,作为一实施例,随着盒100可拆装地安装于手持件10而与其电连接,压电马达和与之结合的超声波产生部211分别接收rf信号。即,所述压电马达和超声波产生部211分别从手持件10接收rf信号而被驱动。
[0093]
例如,用于变更在z轴方向上的位置所需的rf信号值和用于向皮肤提供高强度聚焦超声波的rf信号值可以在每个时间点不同,因此压电马达可以从与向皮肤输出超声波的超声波产生部211不同的rf发生模块接收rf信号。例如,压电马达可以从布置于手持件10中的rf电路接收提供的电流,并且超声波产生部211可以从配备于医疗装置的主体的rf电路接收电流。
[0094]
此外,如图1至图3所示,所述压电马达以封装的状态布置,以防止脱气水流入。即,根据频率的提供而发生振动,从而变更第二移动体152的位置,因此压电马达的振动单元(图5的151)在处于封装的状态下仅连接用于控制的电线,以不受填充于盒100内的脱气水的影响。
[0095]
此外,在另一实施例中,盒100包括移动模块位置测量部。移动模块位置测量部为了设定超声波在皮肤内的聚焦深度而测量结合于超声波产生部211的所述移动模块的位置。即,移动模块位置测量部起到判断第二移动体152是否布置于可形成所需的聚焦深度的第二轴方向上的位置的作用。
[0096]
尤其,如果所述第二移动部150为压电马达且为了变更第二轴方向的位置而持续驱动压电马达,则随着压电马达的元件特性发生变形,即使提供相同的rf信号,在第二轴方向上移动的距离也会不同。因此,为了不受压电马达的特性变化的影响而设定准确的聚焦深度,需要测量第二移动体152在第二轴方向上的位置的移动模块位置测量部。
[0097]
所述移动模块位置测量部可以以多种方式实现。作为一实施例,如图3所示,移动模块位置测量部是在压电马达的侧面以特定间隔设置有多个霍尔传感器155的轨道154。由于磁体(未图示)配备于移动模块(即,第二移动体)或者超声波产生部211的侧面,因此当第二移动体152在z轴方向上移动时,可以基于受磁体影响的霍尔传感器155来判断深度方向上的位置。具体地说,当超声波产生部211在z轴方向上的位置通过压电马达的驱动而变更时,主体部或者手持件10的控制部可以将多个霍尔传感器中的感测到结合于超声波产生部211的磁体(未图示)的磁性(或者磁场)的霍尔传感器155的位置判断为z轴方向(即,第二轴方向)上的位置。
[0098]
作为一例,如图3所示,当压电马达因第一移动体132而在x轴方向(即,第一轴方向)上移动时布置有霍尔传感器155的轨道154也一起移动,与在x轴方向上的位置无关地都可以执行测量。此时,霍尔传感器155以及轨道154可以形成为当在x轴方向上与压电马达一起移动时对内部不造成影响的结构。具体而言,所述轨道154可以结合于所述第一移动体132的一侧,与所述第二移动部150的移动轴平行地布置,当所述第二移动部150通过所述第
一移动体132在第一轴方向上移动时,可以与其一体移动。
[0099]
此外,作为另一例,在治疗期间在盒100的两端设定z轴方向的位置,然后在仅执行相同深度的移动的情况下,配备有霍尔传感器155的轨道154也可以配备于盒100的一侧面,以用于在治疗开始时初始设定深度。具体地,所述轨道154可以布置于所述盒100的内部一侧面处,所述控制部可以在超声波治疗开始之前将第一移动体132移动至布置有所述轨道154的一侧面,然后设定第二轴方向上的布置位置。
[0100]
此外,作为另一实施例,移动模块位置测量部可以配备有第三移动体,所述第三移动体与结合有超声波产生部的第二移动体152分开地在第二移动体152与z轴驱动部之间短距离移动。即,第三移动体可以移动通过以特定比率缩小第二移动体152的移动距离而获得的距离,并且可以基于第三移动体的位置来计算出第二移动体152的位置。
[0101]
此外,作为另一实施例,移动模块位置测量部可以是红外线发射部及红外线接收部。例如,移动模块可以配备有红外线发射部,并且多个红外线接收部可以以特定间隔布置于盒外壳101侧面,以测量是否达到所期望的深度。
[0102]
此外,作为另一实施例,移动模块位置测量部可以是超声波距离测量模块153。超声波距离测量模块测量从压电马达的驱动部到超声波产生部之间的距离。如图2所示,超声波距离测量模块153配备于压电马达封装体内部,向超声波产生部211侧输出用于测量距离的超声波。此时,超声波距离测量模块153与所述第二移动体152的移动轴平行地向所述超声波产生部211输出用于测量距离的超声波,从而能够测量准确的第二轴方向上的直线距离。
[0103]
据此,超声波距离测量模块153可以基于从超声波产生部211反射回来的超声波来测量超声波产生部211在z轴方向上的位置。由此,即使随着压电马达的使用而发生特性变化,也能够计算出z轴方向上的准确位置。
[0104]
此外,作为一实施例,手持件10的控制部可以判断压电马达的变化特性。随着超声波输出模块的使用,可能发生特性变化,因此当提供相同的rf信号时,压电马达的移动模块移动的距离可能不同。因此,为了准确地设定z轴方向深度,需要判断变化的特性,并基于此而提供用于控制移动模块的rf信号。例如,控制部可以基于从初始点到终点提供特定值的rf信号的到达时间来判断及设定改变的特性。控制部可以基于该时间值来设定用于设定深度的rf信号提供条件。
[0105]
图6是根据本发明的一实施例的超声波医疗装置用盒的剖视图。
[0106]
图7a至图7b是示出根据本发明的一实施例的超声波医疗装置用盒的超声波产生部的第二轴方向移动状态的剖视图。
[0107]
图8至图9是示出根据本发明的一实施例的超声波医疗装置用盒的超声波产生部位置测量部检测超声波产生部的第二轴方向位置的状态的剖视图。
[0108]
参照图6,在本实施例中,第二移动部150可以包括结合于第一移动体132的压电旋转马达156,压电旋转马达156可以具有沿第二轴方向布置的驱动轴156a,第二移动体152'可以设置为能够通过驱动轴156a的转动而在第二轴方向上往复移动,超声波产生部211可以结合于第二移动体152'。
[0109]
在本实施例中,压电旋转马达156可以结合于第一移动体132,并且压电材料可以内置于其中。这样的压电材料的形状可以通过从rf发生模块接收的rf信号而发生细微的变
化,压电旋转马达156可以通过压电材料的细微的形状变化来细微地转动驱动轴156a。
[0110]
如上所述,随着驱动轴156a细微转动,通过驱动轴156a的转动而在第二轴方向上移动的第二移动体152'和超声波产生部211在第二轴方向上的位置可以精密地变更。其结果,随着超声波产生部211在第二轴方向上的位置而变更的超声波产生部211的高强度聚焦超声波的聚焦深度也可以精密地变更。
[0111]
作为一例,压电旋转马达156可以基于从rf发生模块提供的rf信号的强度来变更第二移动体152'和超声波产生部211在第二轴方向上的移动速度。例如,随着提供至压电旋转马达156的rf信号的强度增加,驱动轴156a的转动速度增加,由此,第二移动体152'和超声波产生部211在第二轴方向上的移动速度也增加。相反,随着提供至压电旋转马达156的rf信号的强度减小,驱动轴156a的转动速度减小,由此,第二移动体152'和超声波产生部211在第二轴方向上的移动速度减小。
[0112]
作为另一示例,压电旋转马达156可以基于从rf发生模块接收rf信号的时间来变更超声波产生部211在第二轴方向上的移动距离。例如,随着压电旋转马达156接收rf信号的时间增加,驱动轴156a的转动时间增加,由此,超声波产生部211在第二轴方向上的移动距离也增加。相反,随着压电旋转马达156接收rf信号的时间减少,驱动轴156a的转动时间减少,从而超声波产生部211在第二轴方向上的移动距离也减少。
[0113]
前述的向压电旋转马达156提供的rf信号的强度及压电旋转马达156接收rf信号时间可以通过控制部而得到控制。
[0114]
驱动轴156a布置为从压电旋转马达156沿第二轴方向突出的形态,并且在驱动轴156a的外侧周围形成有沿第二轴方向的螺旋形的螺纹156b。这样的螺纹156b与将后述的第二移动体152'的螺纹孔152a螺纹结合。并且,第二移动体152'被将后述的第一移动体132的引导部132a支撑而防止旋转。
[0115]
因此,当驱动轴156a转动时,第二移动体152'的螺纹孔152a沿驱动轴156a的螺纹156b在第二轴方向上移动,从而可以使第二移动体152'在第二轴方向上的位置改变。
[0116]
如此,如果第二移动体152'在第二轴方向的位置变更,则与第二移动体152'结合的超声波产生部211在第二轴方向的位置也可以变更,由此,超声波产生部211的高强度聚焦超声波的聚焦深度也可以变更。
[0117]
作为一例,参照图7a和图7b,驱动轴156a的螺纹156b可以具有右螺旋形态。如此,在螺纹156b具有右螺旋形态的情况下,当基于图7a,驱动轴156a顺时针转动时,第二移动体152'可以沿右螺旋形态的螺纹156b上升,当基于图7b,驱动轴156a逆时针旋转时,第二移动体152'可以沿右螺旋形态的螺纹156b下降。
[0118]
作为另一例,驱动轴156a的螺纹156b可以具有左螺旋形态。如此,在螺纹156b具有左螺旋形态的情况下,当驱动轴156a顺时针转动时,第二移动体152'可以沿左螺旋形态的螺纹156b下降,当驱动轴156a逆时针转动时,第二移动体152'可以沿左螺旋形态的螺纹156b上升。
[0119]
根据本实施例的超声波医疗装置用盒,当第二移动体152'在第二轴方向上移动或停止时,维持第二移动体152'与驱动轴156a螺纹结合的状态,从而可以防止第二移动体152'因受到重力的影响而下垂的现象。
[0120]
在本实施例中,第二移动体152'可以在第二轴方向上可往复运动地插入至将后述
的引导部132a的内部,并且在第二移动体152'的中心轴处形成有与驱动轴156a的螺纹156b螺纹结合的螺纹孔152a。
[0121]
螺纹孔152a具有对应于驱动轴156a的直径,并且在螺纹孔152a的内周面上形成有对应于螺纹156b的螺旋形的螺纹。
[0122]
如上所述,为了防止第二移动体152'的旋转,第一移动体132具有支撑第二移动体152'的引导部132a。
[0123]
引导部132a可以形成于第一移动体132的下部。引导部132a可以是下部开口的形状,第二移动体152'可以以能够在第二轴方向上往复移动的方式插入于引导部132a的内部。
[0124]
引导部132a具有与第二移动体152'的外侧周边对应的外周面,并且通过这种外周面支撑第二移动体152'的外侧周边,可以起到防止第二移动体152'的旋转并引导第二移动体152'在第二轴方向上移动的作用。
[0125]
在引导部132a可以形成有连通引导部132a与第二移动体152'之间的间隙和盒外壳101的内部的连通孔(未图示)。
[0126]
连通孔起到使填充于盒外壳101内部的脱气水填充引导部132a与第二移动体152'之间的间隙的通道的作用。
[0127]
通过连通孔填充引导部132a与第二移动体152'之间的间隙的脱气水可以根据第二移动体152'在第二轴方向上的移动所引起的超声波产生部211在第二轴方向上的移动而被填充或排出,然而在这种间隙内的脱气水的填充和排出不会导致超声波医疗装置用盒100的整体内部体积变化。
[0128]
因此,在本实施例中,即使在调节超声波产生部211在第二轴方向上的位置时,也不会发生超声波医疗装置用盒100的整体内部体积变化,因此能够简化超声波医疗装置用盒100的结构,并且能够简单地制造超声波医疗装置用盒100。
[0129]
另外,由于压电旋转马达156的压电材料的特性容易依rf信号而变化,即使提供相同的rf信号,驱动轴156a的旋转速度也可能不同,由此,超声波产生部211在第二轴方向上的位置可能偏离预设定的位置。因此,为了在不受压电材料的特性变化的影响的情况下准确地设定超声波产生部211在第二轴方向上的位置,需要检测超声波产生部211在第二轴方向上的位置的超声波产生部位置测量部310。
[0130]
为此,根据本发明的一实施例的超声波医疗装置用盒100可以包括超声波产生部位置测量部310。在本实施例中,超声波产生部位置测量部310起到检测超声波产生部211在第二轴方向上的位置的作用。
[0131]
超声波产生部位置测量部310设置为在第一轴方向上与第二移动体152'隔开,例如,可以设置于引导部132a的内部的顶面。如此,在超声波产生部位置测量部310设置于引导部132a的内部的顶面的情况下,可以防止在第二移动体152'在第二轴方向上移动时第二移动体152'与超声波产生部位置测量部310之间的干扰。
[0132]
超声波产生部位置测量部310可以通过将感测光沿第二轴方向向第二移动体152'输出并感测从第二移动体152'反射的反射光,来测量基于第二轴方向的与第二移动体152'的相对距离,将这样测量的距离值和感测光入射到第二移动体152'的地点与超声波产生部211的下端在第二轴方向上的距离值相加,从而可以计算出超声波产生部211在第二轴方向
上的位置。
[0133]
例如,参照图8,超声波产生部位置测量部310的光发射部和光接收部可以并排布置于引导部132a的顶面。这种光发射部可以沿第二轴方向向第二移动体152'的上表面发射感测光,并且光接收部可以接收从第二移动体152'的上表面反射的反射光。
[0134]
此外,参照图9,超声波产生部位置测量部310的光发射部可以布置于引导部132a的顶面,超声波产生部位置测量部310的光接收部可以布置于第二移动体152'的上表面。这种光发射部可以沿第二轴方向向光接收部发射感测光,光接收部可以接收从光发射部输出的感测光。
[0135]
进一步地,超声波产生部位置测量部310可以通过感测根据与第二移动体152'的相对距离而变动的反射光的强度,来测量与第二移动体152'的相对距离。尤其,超声波产生部位置测量部310可以将反射光转换为电压信号,通过根据反射光的强度而变动的电压信号的电平差来测量与第二移动体152'的相对距离。
[0136]
作为另一例,超声波产生部位置测量部310可以通过感测光的输出时间与反射光的感测时间之间的时间差来测量与第二移动体152'的相对距离。
[0137]
从超声波产生部位置测量部310输出的感测光可以包括红外线、激光、紫外线、发光二极管中的至少一种,超声波产生部位置测量部310可以包括感测感测光的红外线传感器、激光传感器、紫外线传感器、光传感器中的至少一种,但不特别限于此。
[0138]
另外,在从超声波产生部位置测量部310到第二移动体152'的相对距离增加到预定水平以上的情况下,由于从第二移动体152'反射的反射光的强度变得非常微弱,因此超声波产生部位置测量部310可能无法感测到反射光。
[0139]
为了防止这种情况,用于提高感测光的反射率的反射板(未图示)可以设置于第二移动体152'的感测光入射的地点。
[0140]
反射板(未图示)可以与超声波产生部位置测量部310平行地布置,以垂直地反射从超声波产生部位置测量部310入射的感测光。
[0141]
作为一例,反射板(未图示)可以使用用于提高感测光的反射率的玻璃珠或反射镜等,但不特别限于此。
[0142]
以上,参照附图对本发明的一实施例进行了说明,本发明所属的技术领域中的普通的技术人员可以理解为本发明不改变其技术思想或必要特征的前提下可以以其他具体形态实现。因此,以上记载的实施例应理解为在所有方面均为示例性的,而非限定性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。