一种基于岩渣尺寸的tbm破岩效率智能预测方法
技术领域
1.本发明涉及tbm破岩效率预测技术领域,特别涉及一种基于岩渣尺寸的 tbm破岩效率智能预测方法。
背景技术:
2.随着地下空间被不断开发,隧道工程的开挖难度和机械化水平在不断提升,全断面隧道掘进机(tunnel boring machine,tbm)得到了快速发展和应用。传统的钻爆法安全性差、施工程序复杂,相比之下tbm具有以下优点:
①
保证了施工的安全性;
②
掘进速度是传统钻爆法的3-10倍;
③
隧道成型效果好,实现装配一体化;
④
噪声扰动小、对周围环境的影响小。目前tbm已被广泛应用交通、市政、水工、矿山工程等领域。tbm掘进时主要靠安装在掘进机刀盘上刀具与岩石之间的作用来实现破岩,刀具在法向推力和滚动力的作用下使压向掌子面,产生岩石破碎,破岩效率的准确预测能够以有效地为tbm掘进参数设定提供参考。
3.现有的研究多是有关于通过人工智能方法对tbm掘进性能和滚动磨损进行预测,对于破岩效率智能预测的研究内容还非常少。因此,提出一个能够准确预测 tbm破岩效率的智能模型对实现tbm的快速掘进和高效破岩是有重大意义。
技术实现要素:
4.本发明的目的在于提供一种具有预测精度高特点的基于岩渣尺寸的tbm破岩效率智能预测方法。
5.实现本发明目的的技术解决方案为:
6.一种基于岩渣尺寸的tbm破岩效率智能预测方法,包括以下步骤:
7.步骤1:在tbm出渣皮带上安装岩渣图像拍摄装置,实时采集tbm掘进过程中的岩渣图像信息;
8.步骤2:将获取的岩渣图像信息进行图片自动识别,获得岩渣的形状及几何特征;
9.步骤3:收集tbm的现场掘进参数、岩渣几何信息特征和破岩效率数据,并形成样本数据集;
10.步骤4:使用样本数据集建立粒子群算法优化的梯度提升回归树模型,实现tbm破岩效率的智能预测。
11.进一步地,步骤s1所述的岩渣图像拍摄装置包括工业相机,led补光灯,数据存储中心,工业相机型号为佳能n10-w02,有效像素数为1920
×
1080,焦距为4.3mm,设置在tbm出渣皮带的俩侧和上方,实时拍摄岩渣的照片信息, led型号为nijia200专业补光灯,最大光照度为70400lux/0.5m,最高光通亮5800lm,用于对出渣皮带上的岩渣进行灯光补偿,数据存储中心可以实时将拍照所得的岩渣图像传入数据库,再通过无线网络将数据库的数据传入数据存储中心。
12.进一步地,步骤s2所述的岩渣图像处理包括将所采集的岩渣彩色图像转化为灰度图像,即当灰度值大于事先设定的阈值时为1,小于阈值则为0,使用图像联通区域检测算法
来判断连通区域,连通区域即为岩渣的位置,根据连通区域的像素点则可以计算出岩渣的几何特征。
13.进一步地,步骤3所述的tbm现场记录的掘进参数指标有总推力、刀盘转矩和刀盘转速,岩渣几何信息特征包括岩渣的短轴,中轴和长轴,破岩效率用比能来表示。
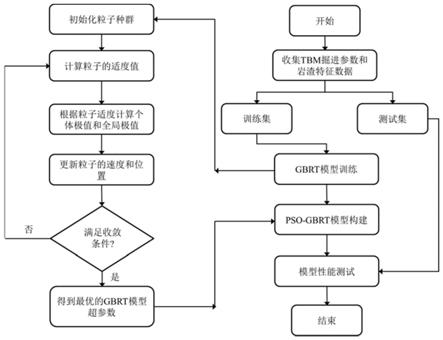
14.进一步地,步骤4所述的使用样本数据集建立粒子群算法优化的梯度提升回归树模型,实现tbm破岩效率的智能预测具体包括:
15.步骤4.1将收集到的样本数据集进行归一化处理,并将其分为训练集和测试集。
16.步骤4.2使用训练集构建gbrt模型,初始化gbrt的参数,包括弱学习器数量,最大树深度,学习速率。
17.步骤4.3初始化粒子群算法相关参数,使用粒子群优化算法对gbrt参数进行寻优,得到最优的弱学习器数量,最大树深度,学习速率参数值。
18.步骤4.4将最优的参数代入gbrt模型,得到训练好的pso-gbrt预测模型,将测试集样本数据带入模型中得到比能预测值,使用r2和rmse指标检验模型的预测性能。
19.进一步地,步骤4.1所述的对数据进行归一化处理计算公式如下:
[0020][0021]
式中x
norm
为数据归一化后的值,x为样本中各参数的原始值,x
max
和x
min
分别为样本中各参数的最大值和最小值。
[0022]
进一步地,步骤4.3所述的使用粒子群算法优化gbrt的具体如下:
[0023]
步骤4.3.1初始化粒子群算法的种群数量20,最大迭代次数200,学习因子 c1和c2为1.5,确定模型超参数弱学习器数量,最大树深度,学习速率的初始值,弱学习器数量取值范围为1到1000,最大树深度的取值范围为1到5,学习速率的取值范围为0.01到1,并随机取得这些参数的初始值。
[0024]
步骤4.3.2计算粒子群个体的适度值,适度值由样本预测值与样本真实值之间的均方误差计算,所有粒子中适应度最好的设置为全体极值。
[0025]
步骤4.3.3更新粒子的速度和位置,并与前一时刻的极值进行比较,更新极值。
[0026]
步骤4.3.4判断是否达到预先设定的最大迭代次数或最小误差条件。若不满足,则返回步骤4.3.2,若满足结束条件,则停止迭代,输出参数弱学习器数量,最大树深度,学习速率的最优解。
[0027]
本发明与现有技术相比,具有的有益效果如下:
[0028]
本发明提出了一种基于岩渣尺寸的tbm破岩效率预测方法,而现有的研究主要是关于使用机器学习的方法对tbm掘进速率和滚动磨损进行预测,缺乏对于破岩效率的智能预测。本发明除了使用常规的梯度提升回归树模型,还组合了粒子群优化算法,从而找到梯度提升回归树树模型的最佳参数,提高了模型的预测精度,破岩效率的准确预测能够以有效地为tbm掘进参数设定和实现高效破岩提供参考。
附图说明
[0029]
图1为本发明的工作流程示意图。
[0030]
图2岩渣图像拍摄装置示意图
具体实施方式
[0031]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0032]
实施例1,参照图1-2,一种基于岩渣尺寸的tbm破岩效率智能预测方法,包括以下步骤:
[0033]
步骤1:在tbm出渣皮带上安装岩渣拍摄装置,实时采集tbm掘进过程中的岩渣图像信息,岩渣图像拍摄装置如图2所示,(1)为工业相机,(2)为led补光灯,(3)为数据存储中心,工业相机型号为佳能n10-w02,有效像素数为1920
×
1080,焦距为4.3mm,设置在tbm出渣皮带的俩侧和上方,实时拍摄岩渣的照片信息,led型号为nijia200专业补光灯,最大光照度为70400 lux/0.5m,最高光通亮5800lm,用于对出渣皮带上的岩渣进行灯光补偿。数据存储中心可以实时将拍照所得的岩渣图像传入数据库,再通过无线网络将数据库的数据传入数据存储中心。
[0034]
步骤2:将获取的岩渣图像信息进行图片自动识别,获得岩渣的形状及几何特征。岩渣图像处理包括将所采集的岩渣彩色图像转化为灰度图像,即当灰度值大于事先设定的阈值时为1,小于阈值则为0,使用图像联通区域检测算法来判断连通区域,连通区域即为岩渣的位置,根据连通区域的像素点则可以计算出岩渣的几何特征。
[0035]
步骤3:收集tbm的现场掘进参数、岩渣几何信息特征和破岩效率数据,并形成样本数据集,tbm现场记录的掘进参数指标有总推力、刀盘转矩和刀盘转速,岩渣几何信息特征包括岩渣的短轴,中轴和长轴,破岩效率用比能来表示。
[0036]
步骤4:使用样本数据集建立粒子群算法优化的梯度提升回归树模型,实现 tbm破岩效率的智能预测,具体如下:
[0037]
步骤4.1将收集到的样本数据集进行归一化处理,并将其分为训练集和测试集,对数据进行归一化处理计算公式如下:
[0038][0039]
式中x
norm
为数据归一化后的值,x为样本中各参数的原始值,x
max
和x
min
分别为样本中各参数的最大值和最小值。
[0040]
步骤4.2使用训练集构建gbrt模型,初始化gbrt的参数,包括弱学习器数量,最大树深度,学习速率。
[0041]
步骤4.3初始化粒子群算法相关参数,使用粒子群优化算法对gbrt参数进行寻优,得到最优的弱学习器数量,最大树深度,学习速率参数值,具体如下:
[0042]
步骤4.3.1初始化粒子群算法的种群数量20,最大迭代次数200,学习因子 c1和c2为1.5,确定模型超参数弱学习器数量,最大树深度,学习速率的初始值,弱学习器数量取值范围为1到1000,最大树深度的取值范围为1到5,学习速率的取值范围为0.01到1,并随机取得这些参数的初始值。
[0043]
步骤4.3.2计算粒子群个体的适度值,适度值由样本预测值与样本真实值之间的均方误差计算,所有粒子中适应度最好的设置为全体极值。
[0044]
步骤4.3.3更新粒子的速度和位置,并与前一时刻的极值进行比较,更新极值。
[0045]
步骤4.3.4判断是否达到预先设定的最大迭代次数或最小误差条件。若不满足,则
返回步骤4.3.2,若满足结束条件,则停止迭代,输出参数弱学习器数量,
[0046]
最大树深度,学习速率的最优解。
[0047]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。