1.本实用新型属于升降床技术领域,具体涉及一种双剪升降床。
背景技术:
2.随着医疗水平的逐渐提高,医疗床的功能也越来越多,根据不同治疗和护理需要,对于功能实现的需求也越来越多。医疗床需要具备升降功能时,往往在床板下方安装升降机构。
3.现有技术中的升降机构运行不够稳定,并且无法满足精准控制的需求。
技术实现要素:
4.针对上述不足,本实用新型的目的是提供一种双剪升降床。
5.本实用新型提供了如下的技术方案:
6.一种双剪升降床,包括底板、叉臂一、叉臂二、叉臂三、叉臂四、滑轨;
7.滑轨安装在底板上;
8.叉臂一中部和叉臂二中部铰接,呈“x”型;
9.叉臂一下端与底板铰接,叉臂二下端与滑轨上安装的滑块一铰接;叉臂一上端与叉臂四下端铰接,叉臂二上端与叉臂三下端铰接;
10.叉臂三中部和叉臂四中部铰接,呈“x”型;
11.叉臂四上端铰接有连接块一,叉臂三上端铰接有连接块二,连接块二上固接有滑块二;
12.连接块二与支撑板固接,滑块二可滑动地安装于支撑板有的滑槽内;
13.叉臂二与叉臂三铰接处的连接轴上铰接有“u”型架;
14.底板上安装有用于驱动“u”型架做竖向直线运动的驱动机构。
15.所述驱动机构为滚珠丝杠升降机,滚珠丝杠升降机的升降丝杆与“u”型架连接,滚珠丝杠升降机与电机连接。
16.底板上端一侧安装有控制器,底板上端另一侧安装有微动开关保护罩,微动开关保护罩内装有微动开关;所述电机与控制器电性连接。
17.滑轨两端分别设有限位开关一和限位开关二限位开关一和限位开关二均与控制器电性连接。
18.叉臂一上安装有与控制器电性连接的角度传感器。
19.底板两侧安装有辅助支架。
20.底板下端四角均安装有支撑座。
21.本实用新型的有益效果是:
22.本实用新型通过设置两对叉臂,并且令叉臂二下端与滑块一铰接,令叉臂三铰接有连接块二,再将连接块二与滑块二固定连接,可以提高支撑板升降过程中的稳定性;本实用新型通过安装角度传感器,可以精准控制支撑板的升降高度。
附图说明
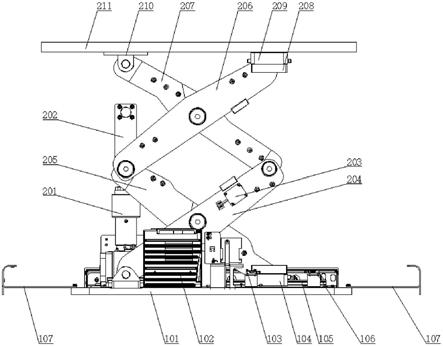
23.图1是本实用新型安装辅助支架时正视图;
24.图2是本实用新型去除支撑板后立体图;
25.图3是本实用新型去除支撑板后侧视图;
26.图4是实用新型安装支撑座时正视图。
27.图中标记为:底板101、控制器102、限位开关一103、滑块一104、滑轨105、限位开关二106、辅助支架107、微动开关保护罩108、支撑座109、驱动机构201、“u”型架202、角度传感器203、叉臂一204、叉臂二205、叉臂三206、叉臂四207、连接块二208、滑块二209、连接块一210、支撑板211。
具体实施方式
28.如图所示,一种双剪升降床,包括底板101、叉臂一204、叉臂二205、叉臂三206、叉臂四207、滑轨105。其中滑轨105固定安装在底板101上,滑轨105上可滑动地安装有滑块一104,滑块一104可沿滑轨105横向滑动。
29.叉臂一204中部和叉臂二205中部通过连接轴铰接,呈“x”型。叉臂一204的下端与底板101铰接,叉臂二205下端与滑块一104铰接。叉臂一204上端与叉臂四207下端通过连接轴铰接,叉臂二205上端与叉臂三206下端通过连接轴铰接,叉臂三206中部和叉臂四207中部通过连接轴铰接,呈“x”型。当叉臂二205与叉臂三206铰接处的连接轴受力向上做直线运动时,滑块一104向叉臂一204与底板101铰接点的方向运动,叉臂一204、叉臂二205、叉臂三206、叉臂四207与水平面之间的夹角增大;当叉臂二205与叉臂三206铰接处的连接轴受力向下做直线运动时,滑块一104向背离叉臂一204与底板101铰接点的方向运动,叉臂一204、叉臂二205、叉臂三206、叉臂四207与水平面之间的夹角减小。
30.叉臂四207上端铰接有连接块一210,叉臂三206上端铰接有连接块二208,连接块二208上固定连接有滑块二209。连接块二208与支撑板211固定连接,滑块二209可滑动地安装于支撑板211设有的滑槽内。当叉臂二205与叉臂三206铰接处的连接轴受力向上做直线运动时,支撑板211升高,与支撑板211固定连接的床板也升高。当叉臂二205与叉臂三206铰接处的连接轴受力向下做直线运动时,支撑板211降低,与支撑板211固定连接的床板也降低。
31.叉臂二205与叉臂三206铰接处的连接轴上铰接有“u”型架202,底板101上安装有用于驱动“u”型架202做竖向直线运动的驱动机构201。具体地,驱动机构201为滚珠丝杠升降机,滚珠丝杠升降机的升降丝杆与“u”型架202连接,滚珠丝杠升降机与电机连接。当升降丝杆做竖向直线运动时,其带动“u”型架202一同做竖向直线运动。
32.底板101上端一侧安装有控制器102,底板101上端另一侧安装有微动开关保护罩108,微动开关保护罩108内装有微动开关。电机与控制器102电性连接,从而可以通过控制器102控制电机启停。
33.滑轨105两端分别设有限位开关一103和限位开关二106,限位开关一103和限位开关二106均与控制器102电性连接,当沿滑轨105滑动的滑块一104喷到限位开关一103或限位开关二106时,控制器102控制电机及时停止运转,从而避免滑块一104运动过限。
34.叉臂一204上安装有与控制器102电性连接的角度传感器203,通过检测叉臂一204
的偏转角度从而得以控制支撑板211的升降高度。
35.为了令此装置安装地更稳固,在底板101两侧安装有辅助支架107,也可以在底板101下端四角均安装支撑座109。
36.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种双剪升降床,其特征在于:包括底板(101)、叉臂一(204)、叉臂二(205)、叉臂三(206)、叉臂四(207)、滑轨(105);滑轨(105)安装在底板(101)上;叉臂一(204)中部和叉臂二(205)中部铰接,呈“x”型;叉臂一(204)下端与底板(101)铰接,叉臂二(205)下端与滑轨(105)上安装的滑块一(104)铰接;叉臂一(204)上端与叉臂四(207)下端铰接,叉臂二(205)上端与叉臂三(206)下端铰接;叉臂三(206)中部和叉臂四(207)中部铰接,呈“x”型;叉臂四(207)上端铰接有连接块一(210),叉臂三(206)上端铰接有连接块二(208),连接块二(208)上固接有滑块二(209);连接块二(208)与支撑板(211)固接,滑块二(209)可滑动地安装于支撑板(211)设有的滑槽内;叉臂二(205)与叉臂三(206)铰接处的连接轴上铰接有“u”型架(202);底板(101)上安装有用于驱动“u”型架(202)做竖向直线运动的驱动机构(201)。2.根据权利要求1所述的双剪升降床,其特征在于:所述驱动机构(201)为滚珠丝杠升降机,滚珠丝杠升降机的升降丝杆与“u”型架(202)连接,滚珠丝杠升降机与电机连接。3.根据权利要求2所述的双剪升降床,其特征在于:底板(101)上端一侧安装有控制器(102),底板(101)上端另一侧安装有微动开关保护罩(108),微动开关保护罩(108)内装有微动开关;所述电机与控制器(102)电性连接。4.根据权利要求3所述的双剪升降床,其特征在于:滑轨(105)两端分别设有限位开关一(103)和限位开关二(106),限位开关一(103)和限位开关二(106)均与控制器(102)电性连接。5.根据权利要求3所述的双剪升降床,其特征在于:叉臂一(204)上安装有与控制器(102)电性连接的角度传感器(203)。6.根据权利要求1~5中任意一项所述的双剪升降床,其特征在于:底板(101)两侧安装有辅助支架(107)。7.根据权利要求1~5中任意一项所述的双剪升降床,其特征在于:底板(101)下端四角均安装有支撑座(109)。
技术总结
本实用新型属于升降床技术领域,具体涉及一种双剪升降床,包括底板、叉臂一、叉臂二、叉臂三、叉臂四、滑轨;滑轨安装在底板上;叉臂一中部和叉臂二中部铰接,呈“X”型;叉臂一下端与底板铰接,叉臂二下端与滑轨上安装的滑块一铰接;叉臂一上端与叉臂四下端铰接,叉臂二上端与叉臂三下端铰接;叉臂三中部和叉臂四中部铰接,呈“X”型;叉臂四上端铰接有连接块一,叉臂三上端铰接有连接块二,连接块二上固接有滑块二;连接块二与支撑板固接,滑块二可滑动地安装于支撑板有的滑槽内;叉臂二与叉臂三铰接处的连接轴上铰接有“U”型架;底板上安装有用于驱动“U”型架做竖向直线运动的驱动机构。本实用新型可提高支撑板升降过程的稳定性。用新型可提高支撑板升降过程的稳定性。用新型可提高支撑板升降过程的稳定性。
技术研发人员:符庆华
受保护的技术使用者:常州青峰亿康机械有限公司
技术研发日:2021.10.09
技术公布日:2022/3/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
