1.本实用新型属于后厨自动化技术领域,具体涉及一种自动煮面系统。
背景技术:
2.随着生活节奏的不断加快,生活水平的不断提高,人们的饮食方式和饮食习惯也在逐渐发生变化。外出就餐人群也随之增长,其中快餐业市场规模占整个餐饮市场六成之多。如此庞大的消费市场带动了餐饮行业的蓬勃发展,与此同时,衍生出的问题也越来越多。为了利益最大化,食材采购是越便宜越好,食品安全得不到保障;厨师工作环境差,浓油浓烟严重有害身体健康;餐厅普遍存在脏、乱、差等卫生情况;在常规餐厅就餐,消费者就餐等待时间过长,年轻人更愿意通过互联网订餐,但是对于互联网供餐单位的卫生情况根本无从知晓。同时,现有技术中也已出现了商用智能炒菜机器,但是只有炒菜功能,无法满足实际的餐饮需求,因此应用前景受到很大限制。
3.专利申请号为cn201710857782.4的实用新型专利公布了一种全自动烹饪售卖机,包括机器壳体、食材存储箱、食材冷藏保鲜库、食材配料传输机、配料注入机、炒菜机、蒸饭机、蒸包点机、成品存储机、煮粥机和打包运输机,所述机器壳体上设有点餐平台、用户识别装置和订单信息提示装置以及取餐平台,当顾客在点餐平台进行点餐并在取餐平台上的取餐口通过用户识别装置扫描确认取餐时,成品存储机将订单对应的盒饭取出到打包运输机,取餐机械手抓取盒饭并通过餐盒打包机进行打包和打印订单后将对应的订单盒饭传输到取餐口。全机械化现场生产制作食品,实现生产食品过程中无外界接触,无二次污染,无人为污染以保证食品安全,集食材存储、自动炒菜、自动蒸饭、自动蒸包点、自动煮粥、自动存储保温等功能于一体,能够提供多样化就餐需求。
4.但是,上述售卖机既能进行自动食材存储、自动炒菜、自动蒸饭、自动蒸包点、自动煮粥、自动存储保温等功能,无法对料盒和餐碗进行逐一取用,且无法进行准确落碗和配料,从而无法实现完全自动化。
技术实现要素:
5.为了解决现有技术存在的上述问题,本实用新型的目的在于提供一种可实现自动落碗和配料的自动煮面系统。
6.本实用新型所采用的技术方案为:
7.一种自动煮面系统,包括封闭主体,封闭主体内设置有物料货架和后台机械手,后台机械手上连接有用于吸取物料货架内的料盒的吸取机构,还包括用于将反面的料盒进行翻转的翻面机构;所述封闭主体内固定有配料机架,配料机架上安装有用于对浇头料盒破口的破口装置,配料机架上还安装有旋转电机,旋转电机的输出轴上连接有的倒料机构,配料机架上安装有微波炉;所述配料机架上还安装有落碗装置,机架上还安装有移动机构,移动机构上连接有餐碗托架,移动机构位于落碗装置和倒料机构下方;所述配料机架上还安装有用于对面食料盒进行破口的破口装置,封闭主体内还安装有前台机械手、煮面锅和台
架,台架上安装有出餐装置。
8.当料盒在物料货架内反面放置时,后台机械手能将料盒夹取到翻面机构内,由翻面机构翻面后,后台机械手再将浇头料盒夹取到后台的破口装置进行破口,将面条料盒夹取到前台的破口装置进行破口。破口的浇头料盒被推入微波炉内加热,加热后料盒被推到倒料机构内。破口的面条料盒被前台机械手夹取后倒入煮面锅内的煮面篓内进行煮制。落碗机构一次性落下一个餐碗,移动机构将餐碗托架移动到落碗装置下方,使得餐碗准确落到餐碗托架上。移动机构再将餐碗移动到最前端,由前台机械手夹取煮面篓后将面条倒入餐碗内。移动机构再将餐碗移动到倒料机构下方,由倒料机构将加热的浇头倒入餐碗内。移动机构再将餐碗移动到最前端,由前台机械手将餐碗夹取到出餐装置内。当顾客付款后,出餐装置自动将餐碗从出餐口升起,则顾客可将盛装面条的餐碗端走。本实用新型的各步骤可在控制装置的控制下连续进行,实现自动落碗和加料,实现完全自动化,减少了人工劳动,且保证干净卫生。
9.作为本实用新型的优选方案,所述翻面机构包括翻面支架,翻面支架上安装有旋转气缸,旋转气缸的活塞杆上连接有用于放置料盒的翻转壳。
10.人工将料盒正反堆叠放置在物料货架内,ccd组件通过视觉判断产品的位置信息和产品的物料信息,并将位置信息发送给机械手控制系统,将产品信息发送给对应的信息终端。进而机械手动作且吸取机构吸取确定位置的料盒。吸取机构将正面放置的料盒直接投放到对应的工位上。吸取机构将反面放置的料盒吸取后先放置在翻面机构上,由翻面机构对料盒进行翻面后再将料盒放置在对应的工位上。
11.吸取机构吸取料盒的表面而不对料盒的侧边进行抓取,则料盒在放置到破口装置的过程中,吸取机构不会与破口装装置进行干涉,保证料盒能准确放置到破口装置内。翻面机构能将反面的料盒进行翻面,保证料盒最终均以正面放置到破口装置内,保证破口装置能对料盒进行准确破口。
12.作为本实用新型的优选方案,所述破口装置包括安装于配料机架上的上底板和下底板,上底板和下底板之间连接有若干导向轴,导向轴之间套设有固定板,固定板上安装有破口刀,上底板上安装有气缸,气缸的活塞杆与固定板连接,下底座上安装有用于固定料盒的定位盒。
13.当需要对料盒进行破口时,气缸的活塞杆驱动固定板向下移动,从而固定板上的破口刀对料盒进行破口。由于定位盒对料盒进行准确定位,则可保证破口刀对料盒进行破口时位置准确。破口后的料盒由机械手抓取出来或推出来。
14.作为本实用新型的优选方案,所述倒料机构包括夹持框,夹持框连接于旋转电机的输出轴上,夹持框上安装有夹紧气缸,夹紧气缸的活塞杆上连接有夹紧板。
15.当将装有餐食的料盒推入微波炉后,微波炉对餐食进行加热。加热好的餐食由推杆推向倒料机构内,倒料机构将料盒夹紧。旋转电机驱动倒料机构倾转,以将料盒内的餐食倒入下方的餐碗内。料盒在加热前已做开口,则倾倒料盒时餐食能准确落入餐碗内。倒出餐食的料盒可扔到下方的垃圾桶内。在夹紧气缸的活塞杆的拉动下,夹紧板向夹持框靠近,则夹紧板和夹持框能将两料盒夹紧,避免倾倒料盒内的餐食时料盒掉落的情况。当需要将料盒扔到垃圾桶时,夹紧气缸的活塞杆推出,则夹紧板将料盒松开,料盒能自动落下。
16.作为本实用新型的优选方案,所述落碗装置包括主支架,主支架上安装有用于支
撑餐碗底部的支撑机构,主支架上还安装有用于将从下往上第一个和第二个餐碗分隔开的分碗机构,分碗机构的输出端还连接有用于将最下层的餐碗往下压的下压机构。
17.当支撑机构的输出端伸出时,一摞餐碗的底部得到支撑,避免餐碗掉落。当需要取用餐碗时,分碗机构的输出端伸出,则分碗机构将最下层和倒数第二层的碗分隔开。下压机构的输出端也处于最下层和倒数第二层餐碗之间,则当下压机构动作时,下压机构能将最下层的餐碗往下推,从而最下层的餐碗能落到准确位置。下压机构能将最下层餐碗往下推,避免最下层的餐碗与倒数第二层餐碗卡紧而无法自行掉落的情况。
18.作为本实用新型的优选方案,所述移动机构包括移动连接板,移动连接板连接于配料机架上,移动连接板上安装有单轴输送带,餐碗托架连接于单轴输送带上。单轴输送机能将餐碗托架进行准确移动,当餐碗托架移动到落碗装置下方时,落碗装置能将餐碗准确落入餐碗托架内;当餐碗托架移动到最前端时,机械手能将煮好的面条准确倒入餐碗内;当餐碗托架移动到倒料机构下方时,倒料机构能将加热好的浇头准确到入餐碗内。
19.作为本实用新型的优选方案,所述前台机械手上连接有夹持机构,夹持机构包括与前台机械手连接的夹持固定板,夹持固定板上安装有平行夹板气缸,平行夹板气缸的两个输出端均连接有夹持连接板,夹持连接板上固定有夹爪,夹爪上分别设置有用于夹持煮面篓或餐碗的圆盒夹持段和用于夹持料盒的方盒夹持段。
20.平行夹板气缸具有两个输出端,且两个输出端同步相向或相背移动。因此,在平行夹板气缸的驱动下,两个夹爪能靠拢或松开,以对煮面篓、餐碗或料盒进行夹持或松开。圆盒夹持段的内侧为圆弧形,以适应煮面篓或者餐碗的形状,保证煮面篓或餐碗能被可靠夹紧。而方盒夹持段内侧为直线型,从而方盒夹持段能与料盒可靠接触,保证料盒得到可靠夹紧。本实用新型能分别夹持和转移煮面篓、餐碗和料盒,功能性强,夹持可靠。
21.作为本实用新型的优选方案,所述出餐装置包括出餐安装架,出餐安装架上安装有升降驱动机构,升降驱动机构的输出端连接有出餐托盘,出餐托盘与出餐安装架之间连接有连杆机构,连杆机构的另一端连接有出餐挡板,出餐挡板位于出餐托盘上方。
22.当盛好餐食的餐碗放置到出餐托盘上方后,升降驱动机构推动出餐托盘上升,则餐碗能被推升到出餐口。出餐托盘上升的过程中带动连杆机构动作,连杆机构将出餐挡板移开,则顾客能从出餐口顺利取餐。本实用新型的出餐挡板仅在出餐托盘上升时才联动打开,保证顾客能及时取餐。并且,在未取餐时,出餐挡板始终将出餐口封闭,避免顾客将手伸进设备内部,也避免物料顾客无未付费时取餐的情况,还能避免餐食被外界污染。
23.本实用新型的有益效果为:
24.本实用新型能对反面放置的料盒进行自动翻面,且对料盒进行破口,并在煮制面条和加热浇头后,自动进行落碗和配料,最终出餐。各步骤可在控制装置的控制下连续进行,实现完全自动化,减少了人工劳动,且保证干净卫生。
附图说明
25.图1是本实用新型的结构示意图;
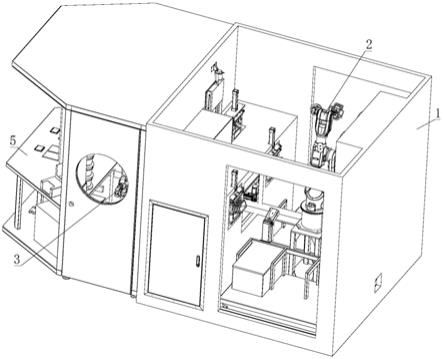
26.图2是拆掉封闭主体后本实用新型第一方向的结构示意图;
27.图3是拆掉封闭主体后本实用新型第二方向的结构示意图;
28.图4是料盒吸取系统的的结构示意图;
29.图5是吸取机构的结构示意图;
30.图6是翻面机构的结构示意图;
31.图7是浇头料盒破口装置的第一方向的结构示意图;
32.图8是浇头料盒破口装置的第二方向的结构示意图;
33.图9是浇头料盒破口装置中破口刀的结构示意图;
34.图10是浇头料盒破口装置的中定位盒的结构示意图;
35.图11是面条料盒破口装置的第一方向的结构示意图;
36.图12是面条料盒破口装置的第二方向的结构示意图;
37.图13是面条料盒破口装置中破口刀的结构示意图;
38.图14是面条料盒破口装置中定位盒的结构示意图。
39.图15是自动配料系统的结构示意图;
40.图16是自动配料系统的部分结构图;
41.图17是自动配料系统部分结构第二方向的结构示意图;
42.图18是移动机构的结构示意图;
43.图19是移动机构的主视图;
44.图20是倒料机构的安装结构图;
45.图21是图20中a处的局部放大图;
46.图22是旋转电机和倒料机构的结构示意图;
47.图23是落碗装置的结构示意图;
48.图24是落碗装置去掉护罩时的部分结构图;
49.图25是落碗装置的部分结构图;
50.图26是支撑机构、分碗机构和下压机构的安装结构图;
51.图27是前台机械手夹持机构的结构示意图;
52.图28是前台机械手夹持机构的部分结构图
53.图29是出餐装置的结构示意图;
54.图30是出餐装置部分结构第一方向的结构示意图;
55.图31是出餐装置部分结构第二方向的结构示意图。
56.图中,1-封闭主体;2-后台机械手;3-前台机械手;4-煮面锅;5-台架;6-控制柜;7-电气柜;8-接水托盘;9-暂存架;a1-物料货架;a3-ccd组件;a5-吸取机构;a6-翻面机构;a7-底板;a51-伸缩气缸;a52-吸取安装板;a53-吸盘;a54-限位槽;a55-导向板;a61-翻面支架;a62-旋转气缸;a63-翻转壳;a631-u型开口;a632-翻面喇叭口;b1-上底板;b2-下底板;b3-导向轴;b4-固定板;b5-破口刀;b6-气缸;b7-定位盒;b8-导向压板;b41-导向孔;b51-缺口;b61-浮动板;b71-槽口;b72-操作口;b81-导向柱;b82-限位头;b83-弹簧;b84-导向块;c1-配料机架;c2-微波炉;c3-旋转电机;c4-倒料机构;c5-落碗装置;c6-移动机构;c7-餐碗托架;c8-防漏架;c11-倒料原点位置传感器;c12-倒料极限位置传感器;c21-出料口;c22-推杆;c41-夹持框;c42-夹紧气缸;c43-夹紧板;c44-倒料喇叭口;c45-倒料感应片;c51-主支架;c52-支撑机构;c53-分碗机构;c54-下压机构;c55-传感器;c56-护罩;c57-分碗封板;c58-电磁阀;c61-移动连接板;c62-单轴输送带;c63-微动开关;c64-餐碗原点位置传感器;c65-餐碗极限位置传感器;c71-三角限位块;c72-餐碗位置感应片;c411-插块;c431-限位
孔;c511-落碗孔;c512-限位杆;c521-支撑气缸;c522-支撑底板;c531-分碗气缸;c532-支撑分离片;c533-让位槽;c541-下压气缸;c542-下压分离片;d1-夹持固定板;d2-平行夹板气缸;d3-夹持连接板;d4-夹爪;d21-气缸主体;d22-滑块;d23-滑槽;d24-气体接头;d41-圆盒夹持段;d42-方盒夹持段;d43-台阶段;d411-圆弧形凸起;d421-锯齿段;d422-防掉挡片;e1-安装架;e2-升降驱动机构;e3-出餐托盘;e4-连杆机构;e5-出餐挡板;e6-导向滑座;e7-导向杆;e8-防护槽;e9-出餐传感器;e11-底座;e12-立柱;e13-安装板;e14-安装座;e21-电机;e22-电动推杆;e31-凸出杆;e41-开合连杆;e42-驱动连杆;e81-取餐缺口。
具体实施方式
57.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
58.如图1~图3所示,本实施例的自动煮面系统,包括封闭主体1,封闭主体1内设置有物料货架a1和后台机械手2,后台机械手2上连接有用于吸取物料货架a1内的料盒的吸取机构a5,还包括用于将反面的料盒进行翻转的翻面机构a6;所述封闭主体1内固定有配料机架c1,配料机架c1上安装有用于对浇头料盒破口的破口装置,配料机架c1上还安装有旋转电机c3,旋转电机c3的输出轴上连接有的倒料机构c4,配料机架c1上安装有微波炉c2;所述配料机架c1上还安装有落碗装置c5,机架上还安装有移动机构c6,移动机构c6上连接有餐碗托架c7,移动机构c6位于落碗装置c5和倒料机构c4下方;所述配料机架c1上还安装有用于对面食料盒进行破口的破口装置,封闭主体1内还安装有前台机械手3、煮面锅4和台架5,台架5上安装有出餐装置。
59.当料盒在物料货架a1内反面放置时,后台机械手2能将料盒夹取到翻面机构a6内,由翻面机构a6翻面后,后台机械手2再将浇头料盒夹取到后台的破口装置进行破口,将面条料盒夹取到前台的破口装置进行破口。破口的浇头料盒被推入微波炉c2内加热,加热后料盒被推到倒料机构c4内。破口的面条料盒被前台机械手3夹取后倒入煮面锅4内的煮面篓内进行煮制。落碗机构一次性落下一个餐碗,移动机构c6将餐碗托架c7移动到落碗装置c5下方,使得餐碗准确落到餐碗托架c7上。移动机构c6再将餐碗移动到最前端,由前台机械手3夹取煮面篓后将面条倒入餐碗内。移动机构c6再将餐碗移动到倒料机构c4下方,由倒料机构c4将加热的浇头倒入餐碗内。移动机构c6再将餐碗移动到最前端,由前台机械手3将餐碗夹取到出餐装置内。当顾客付款后,出餐装置自动将餐碗从出餐口升起,则顾客可将盛装面条的餐碗端走。本实用新型的各步骤可在控制装置的控制下连续进行,实现自动落碗和加料,实现完全自动化,减少了人工劳动,且保证干净卫生。
60.以下介绍料盒吸取系统的具体结构:
61.如图4所示,后台机械手2上连接有用于识别料盒位置与物料信息的ccd组件a3和用于吸取物料货架a1内的料盒的吸取机构a5,还包括用于将反面的料盒进行翻转的翻面机构a6。
62.人工将料盒正反堆叠放置在物料货架a1内,ccd组件a3通过视觉判断产品的位置信息和产品的物料信息,并将位置信息发送给机械手控制系统,将产品信息发送给对应的
信息终端。进而机械手动作且吸取机构a5吸取确定位置的料盒。吸取机构a5将正面放置的料盒直接投放到对应的工位上。吸取机构a5将反面放置的料盒吸取后先放置在翻面机构a6上,由翻面机构a6对料盒进行翻面后再将料盒放置在对应的工位上。其中浇头料盒被夹取到后台的破口装置内,面条料盒被夹取到前台的破口装置内。
63.吸取机构a5吸取料盒的表面而不对料盒的侧边进行抓取,则料盒在放置到破口装置的过程中,吸取机构a5不会与破口装装置进行干涉,保证料盒能准确放置到破口装置内。翻面机构a6能将反面的料盒进行翻面,保证料盒最终均以正面放置到破口装置内,保证破口装置能对料盒进行准确破口。
64.如图5所示,所述吸取机构a5包括伸缩气缸a51,伸缩气缸a51安装于机械手上,伸缩气缸a51的活塞杆上固定有吸取安装板a52,吸取安装板a52上连接有若干用于吸取料盒的吸盘a53,吸盘a53与负压装置连接。机械手可将吸取机构a5移动到确定位置,伸缩气缸a51能增大行程,从而各位置的料盒均能被吸取。当吸盘a53移动到料盒表面时,负压装置抽取吸盘a53内空气,从而能将料盒吸起来。机械手再将料盒移动到工位上或翻面机构a6内。
65.为了使料盒移动更加稳定,所述伸缩气缸a51的缸筒上设置有限位槽a54,吸取安装板a52上连接有导向板a55,导向板a55的另一端套设于限位槽a54内。伸缩气缸a51带动吸盘a53和料盒移动的过程中,限位槽a54能对导向板a55进行限位,从而料盒移动时更加稳定,避免料盒掉落的情况。
66.如图6所示,所述翻面机构a6包括翻面支架a61,翻面支架a61上安装有旋转气缸a62,旋转气缸a62的活塞杆上连接有用于放置料盒的翻转壳a63。旋转气缸a62能驱动翻转壳a63翻转180
°
,翻转壳a63中的料盒相应翻转。再由吸取机构a5对料盒进行吸取时,吸取机构a5能吸附料盒的正面,从而料盒能以正面朝上的方向被放置到工位中,保证位置准确。
67.其中,所述翻转壳a63的相对的两侧均设置有u型开口a631。吸取机构a5将料盒放入翻转壳a63或从翻转壳a63中取出时,吸取机构a5能伸进u型开口a631内,避免发生运动干涉。
68.所述翻转壳a63远离旋转气缸a62的一端设置有翻面喇叭口a632。翻转壳a63的开口为翻面喇叭口a632,则料盒能更加容易地被放入翻转壳a63内。
69.更进一步,所述机械手为六轴机器人。所述物料货架a1的数量为两个,两个物料货架a1分设于机械手的两侧。所述翻面机构a6设置于两个物料货架a1之间。翻面机构a6位于两个物料货架a1之间,则吸取机构a5将料盒从物料货架a1转移到翻面机构a6的距离较短,有利于提高效率。本实用新型还包括底板a7,物料货架a1、机械手和翻面机构a6均安装于底板a7上。底板a7作为本实用新型的安装基础,可将物料货架a1、机械手和翻面机构a6进行准确布置,方便机械手准确动作。
70.以下介绍破口装置的具体结构:
71.如图7和图8所示,配料机架c1靠近后台机械手2的一侧安装有两个破口装置,用于对浇头料盒进行破口;配料机架c1靠近前台机械手3的一侧安装有一个破口装置,用于对面条料盒进行破口。
72.破口浇头料盒时料盒的一侧长边不断开,破口后由机械手将料盒从定位盒b7推向微波炉c2。该料盒破口装置包括上底板b1和下底板b2,上底板b1和下底板b2之间连接有若干导向轴b3,导向轴b3之间套设有固定板b4,固定板b4上安装有破口刀b5,上底板b1上安装
有气缸b6,气缸b6的活塞杆与固定板b4连接,下底座e11上安装有用于固定料盒的定位盒b7。
73.当需要对料盒进行破口时,气缸b6的活塞杆驱动固定板b4向下移动,从而固定板b4上的破口刀b5对料盒进行破口。由于定位盒b7对料盒进行准确定位,则可保证破口刀b5对料盒进行破口时位置准确。破口后的料盒由机械手抓取出来或推出来。本实用新型能对料盒进行自动破口,提高了料盒破口效率,其结构简单,操作方便。
74.为了保证破口时的稳定性,所述破口刀b5外套设有导向压板b8,导向压板b8上固定有若干导向柱b81,固定板b4上设置有导向孔b41,导向柱b81穿过导向孔b41,导向柱b81远离导向压板b8的一端固定有限位头b82。在固定板b4带动破口到向下移动时,导向压板b8也向下移动,导向压板b8能压紧在料盒的四周,保证料盒得到固定,进一步提高料盒破口时位置的准确性。限位头b82能避免导向柱b81脱出导向孔b41。所述导向柱b81上套设有弹簧b83。弹簧b83能将导向压板b8往下压,保证破口过程中导向压板b8始终能将料盒压紧。
75.具体地,如图9所示,所述破口刀b5的一侧长边上设置有缺口b51。在破口刀b5的一侧长边上设置缺口b51,则料盒被破口后,该边上未破口,保证倾倒料盒中餐食时盒盖不会掉落。
76.如图10所示,所述定位盒b7在破口刀b5设置缺口b51的一侧设置有用于移出料盒的槽口b71,定位盒b7远离槽口b71的一侧设置有操作口b72。当料盒被破口后,可朝槽口b71方向将料盒推出定位盒b7。推动料盒时,机械手伸到操作口b72位置进行操作。
77.所述导向压板b8在破口刀b5设置缺口b51的一侧连接有导向块b84。由于定位盒b7上设置有槽口b71,则在导向压板b8的槽口b71一侧设置导向块b84,可使料盒在该侧被导向块b84压紧,避免破口时料盒在该侧破溃。所述导向块b84的形状为楔形。破口刀b5进行下压破口时,楔形的导向块b84逐步与料盒的侧壁压紧,避免料盒在槽口b71侧破溃。
78.更进一步,所述气缸b6的活塞杆与固定板b4之间连接有浮动板b61。浮动板b61能时气缸b6的活塞杆与固定板b4可靠连接,避免移动固定板b4时固定板b4倾斜。
79.如图11和图12所示,破口面条料盒时料盒的一侧短边不断开,破口后由机械手将料盒从定位盒b7抓取出来。
80.如图13所示,与破口浇头料盒的破口装置不同的是,破口面条料盒的破口装置的破口刀b5的一侧短边上设置有缺口b51。在破口刀b5的一侧短边设置缺口b51,则料盒被破口后,仅留一短边连接,方便倾倒餐食且避免盒盖掉落。如图16所示,所述定位盒b7的两个短边上均设置有操作口b72。在定位盒b7的两个设置操作口b72,方便机械手对破口后的料盒进行抓取。
81.以下介绍倒料机构c4的具体结构:
82.如图15~图17、图20、图21所示,所述倒料机构c4包括夹持框c41,夹持框c41连接于旋转电机c3的输出轴上,夹持框c41上安装有夹紧气缸c42,夹紧气缸c42的活塞杆上连接有夹紧板c43。在夹紧气缸c42的活塞杆的拉动下,夹紧板c43向夹持框c41靠近,则夹紧板c43和夹持框c41能将两料盒夹紧,避免倾倒料盒内的餐食时料盒掉落的情况。当需要将料盒扔到垃圾桶时,夹紧气缸c42的活塞杆推出,则夹紧板c43将料盒松开,料盒能自动落下。
83.如图22所示,为了保证夹紧板c43稳定移动,所述夹紧板c43上设置有若干限位孔c431,夹持框c41上设置有若干插块c411,插块c411插入限位孔c431内。插块c411能对限位
孔c431进行限位,保证夹紧板c43的位置准确,从而保证夹紧板c43与夹持框c41能将料盒可靠夹紧。
84.并且,所述夹持框c41和夹紧板c43上均设置有放置料盒掉落的挡边。倒料机构c4翻转时,夹持框c41和夹紧板c43上的挡板能对料盒进行阻挡,避免夹持框c41和夹紧板c43对料盒的夹持力不够时料盒掉落的情况。
85.更进一步,所述倒料机构c4朝向出料口c21的一侧设置有倒料喇叭口c44。倒料机构c4朝向微波炉c2的出料口c21的一侧设置为倒料喇叭口c44,方便推杆c22将料盒准确推入倒料机构c4内。
86.为了避免汤料洒落,所述机架上安装有用于防止汤料洒落出来的防漏架c8,防漏架c8位于倒料机构c4的下方。在翻转料盒时,最后的汤料可能会滴出餐碗外。而在该处设置防漏架c8,则最后滴落的汤料能落到防漏架c8上并从防漏架c8流到餐碗内,保证倒料时干净卫生。
87.机架上微波炉c2和倒料机构c4均为两个,且两侧均设置移动架,通过两侧同时进行加料以提高效率。当将装有餐食的料盒推入微波炉c2后,微波炉c2对餐食进行加热。加热好的餐食由推杆c22推向倒料机构c4内,倒料机构c4将料盒夹紧。旋转电机c3驱动倒料机构c4倾转,以将料盒内的餐食倒入下方的餐碗内。料盒在加热前已做开口,则倾倒料盒时餐食能准确落入餐碗内。支撑座可在移动架上移动,则支撑座移动到倒料机构c4下方时,料盒的餐食能直接倒入餐碗内,实现转移餐食。倒出料盒内的餐食倒出后,倒料机构c4松开,则料盒能准确落入下方的垃圾桶内。
88.为了保证倒料机构c4转动位置的准确性,所述倒料机构c4上固定有倒料感应片c45,机架上安装有倒料原点位置传感器c11,感应片c45触发倒料原点位置传感器c11时倒料机构c4的进口对准微波炉c2的出料口c21。当倒料机构c4转动时,倒料感应片c45相应转动。当感应片c45触发倒料原点位置传感器c11时,控制装置控制旋转的电机e21停机。此时,倒料机构c4的进口对准出料口c21,推杆c22能将料盒准确推入倒料机构c4内,保证转移料盒时的成功率。并且,所述机架上还安装有倒料极限位置传感器c12时,倒料感应片c45触发倒料极限位置传感器c12时倒料机构c4翻转到极限角度。当倒料感应片c45触发倒料极限位置传感器c12时,倒料机构c4转动到极限位置,此时,餐食能彻底倒出,避免料盒角度不准确时料盒内的餐食无法完全倒出的情况。
89.需要倒料时,旋转电机c3驱动料盒往远离微波炉c2的出料口c21的方向翻转,至料盒内的餐食倒入餐碗内。倒料极限位置传感器c12位于倒料原点位置传感器c11远离出料口c21的一侧,则料盒从原点翻转到极限位置经过的角度超过
°
,保证餐食能彻底倒出。
90.以下介绍落碗装置c5的具体结构:
91.如图23~图25所示,本实施例的自动落碗装置c5,包括护罩c56,护罩c56内安装有两个主支架c51,护罩c56的一侧设有开口,护罩c56设开口的一侧连接有分碗封板c57。主支架c51两侧均安装有用于支撑餐碗底部的支撑机构c52,主支架c51的两侧均安装有用于将从下往上第一个和第二个餐碗分隔开的分碗机构c53,分碗机构c53的输出端还连接有用于将最下层的餐碗往下压的下压机构c54。主支架c51上设置有落碗孔c511,主支架c51的落碗孔c511周围设置有若干限位杆c512,若干餐碗放置于若干限位杆c512围成的范围内。所述分碗封板c57上安装有电磁阀c58。电磁阀c58分别与支撑气缸c521、分碗气缸c531和下压气
缸c541电连接。
92.当支撑机构c52的输出端伸出时,一摞餐碗的底部得到支撑,避免餐碗掉落。当需要取用餐碗时,分碗机构c53的输出端伸出,则分碗机构c53将最下层和倒数第二层的碗分隔开。下压机构c54的输出端也处于最下层和倒数第二层餐碗之间,则当下压机构c54动作时,下压机构c54能将最下层的餐碗往下推,从而最下层的餐碗能落到准确位置。下压机构c54能将最下层餐碗往下推,避免最下层的餐碗与倒数第二层餐碗卡紧而无法自行掉落的情况。
93.两侧均设置支撑机构c52,则一摞餐碗能被稳定支撑。两侧均设置分碗机构c53,则除了最下层以外的其它餐碗均能得到分碗机构c53可靠支撑。两侧均设置下压机构c54,则从两侧同时将最下层餐碗的碗沿往下压,保证餐碗平稳下落,避免仅从单侧下压餐碗二导致餐碗卡死的情况。若干限位杆c512对一摞餐碗进行限位,保证一摞餐碗的垂直度,从而餐碗下落更加可靠。
94.具体地,所述支撑机构c52包括支撑气缸c521,支撑气缸c521安装于主支架c51上,支撑气缸c521的活塞杆上连接有支撑底板c522,支撑底板c522伸出时支撑餐碗的底部。支撑气缸c521的活塞杆伸出时,支撑底板c522伸到餐碗所在区域,则放入一摞餐碗时,支撑底板c522能对餐碗进行支撑,避免餐碗掉落。
95.具体地,所述分碗机构c53包括分碗气缸c531,分碗气缸c531安装于主支架c51上,分碗气缸c531的活塞杆上连接有支撑分离片c532,下压机构c54也安装于分碗气缸c531的活塞杆上,支撑分离片c532伸出时插入从下往上第一个和第二个餐碗之间。支撑机构c52支撑一摞碗的底部,则支撑分离片c532伸出时刚好插入最下层和倒数第二层餐碗之间。当支撑机构c52收回时,仅最下层的餐碗得不到支撑分离片c532的支撑,则此时下压机构c54可将最下层的餐碗往下推。
96.具体地,所述下压机构c54包括下压气缸c541,下压气缸c541安装于分碗气缸c531的活塞杆上,下压气缸c541的活塞杆上连接有下压分离片c542,下压分离片c542向下移动时将最下层的餐碗往下推。下压机构c54随分碗机构c53的活塞杆一同移动,则支撑分离片c532和下压分离片c542一同插入最下层和倒数第二层的餐碗之间。当下压气缸c541的活塞杆伸出时,下压分离片c542推动最下层餐碗往下移动,则最下层的餐碗能准确落到下方装置内。
97.更进一步,所述支撑分离片c532的中部设有让位槽c533,下压分离片c542升起时嵌入支撑分离片c532的让位槽c533内。下压分离片c542升起时移动到支撑分离片c532的让位槽c533内,从而支撑分离片c532和下压分离片c542处于同一水平面内,保证支撑分离片c532和下压分离片c542均能插入最下层和倒数第二层餐碗之间。
98.以下介绍移动机构c6的具体结构:
99.如图18和图19所示,所述移动机构c6包括移动连接板c61,移动连接板c61连接于机架上,移动连接板c61上安装有单轴输送带c62,餐碗托架c7连接于单轴输送带c62上。单轴输送机能将餐碗托架c7进行准确移动,当餐碗托架c7移动到落碗装置c5下方时,落碗装置c5能将餐碗准确落入餐碗托架c7内;当餐碗托架c7移动到最前端时,机械手能将煮好的面条准确倒入餐碗内;当餐碗托架c7移动到倒料机构c4下方时,倒料机构c4能将加热好的浇头准确到入餐碗内。
100.更进一步,所述单轴输送带c62上安装有用于检测餐碗托架c7上是否有餐碗的微动开关c63。微动开关c63能准确检测餐碗托架c7内是否有餐碗,避免餐碗托架c7上没有餐碗时进行添加面条或浇头的情况。
101.更进一步,餐碗托架c7上设置有四个三角限位块c71,当餐碗落下时,四个三角限位块c71能对餐碗进行阻挡,保证餐碗准确落到餐碗托架c7上。单轴输送带c62上分别安装有餐碗原点位置传感器c64和餐碗极限位置传感器c65,餐碗托架c7上安装有餐碗位置感应片c72,餐碗托架c7移动的具体位置根据原点位置进行计算并控制。
102.以下介绍前台机械手3上的夹持机构的具体结构:
103.如图27和图28所示,本实施例的机械手夹持机构,包括与机械手连接的夹持固定板d1,夹持固定板d1上安装有平行夹板气缸d2,平行夹板气缸d2的两个输出端均连接有夹持连接板d3,夹持连接板d3上固定有夹爪d4,夹爪d4上分别设置有用于夹持煮面篓或餐碗的圆盒夹持段d41和用于夹持料盒的方盒夹持段d42。所述夹爪d4上还设置有台阶段d43。台阶段d43能增强夹爪d4的强度,保证夹爪d4夹持物品时不会产生弯曲。
104.需要说明的是,平行夹板气缸d2为现有技术,其内部的旋转输出端连接齿轮,齿轮的两侧均啮合齿条,则两个齿条形成两个输出端。气缸b6主体安装于夹持固定板d1上,气缸b6主体上两个输出端上均连接有滑块d22,气缸b6主体上设置有滑槽d23,滑块d22套设于滑槽d23内,夹持连接板d3固定于滑块d22上。平行夹板气缸d2动作时,两个夹爪d4相向或相背移动,此时滑块d22在滑槽d23内平稳滑动,保证两个夹爪d4移动时的平稳性和位置的准确性。平行夹板气缸d2上设置有气体接头d24。气体接头d24用于连接气源,保证平行夹板气缸d2得到稳定供气。
105.平行夹板气缸d2具有两个输出端,且两个输出端同步相向或相背移动。因此,在平行夹板气缸d2的驱动下,两个夹爪d4能靠拢或松开,以对煮面篓、餐碗或料盒进行夹持或松开。圆盒夹持段d41的内侧为圆弧形,以适应煮面篓或者餐碗的形状,保证煮面篓或餐碗能被可靠夹紧。而方盒夹持段d42内侧为直线型,从而方盒夹持段d42能与料盒可靠接触,保证料盒得到可靠夹紧。本实用新型能分别夹持和转移煮面篓、餐碗和料盒,功能性强,夹持可靠。
106.为了保证变形的煮面篓或餐碗能被可靠夹持,所述圆盒夹持段d41上设置有若干用于支撑煮面篓或餐碗侧壁的圆弧形凸起d411。在圆盒夹持段d41夹持煮面篓或者餐碗时,经圆弧形凸起d411与煮面篓或餐碗接触,避免了煮面篓或餐碗发生变形时圆弧形的圆盒夹持段d41无法与煮面篓或餐碗可靠接触的情况。所述圆盒夹持段d41上的圆弧形凸起d411的数量为两个。单个夹爪d4上的圆弧形凸起d411的数量为两个,则夹持煮面篓或餐碗时,共四个圆弧形凸起d411均匀地施加作用力,保证煮面篓或餐碗能被可靠夹紧。
107.为了保证料盒能被可靠夹持,所述方盒夹持段d42上设置有锯齿段d421。当方盒夹持段d42夹持料盒时,方盒夹持段d42上的锯齿能提高与料盒之间得到摩擦力,避免料盒滑落。并且,所述方盒夹持段d42上还固定有防掉挡片d422。由于夹持料盒时,需要将料盒进行翻转并将食物倒入煮面篓内,则防掉挡片d422能在翻转时对料盒进行阻挡,避免料盒掉落。
108.以下介绍出餐装置的具体结构:
109.如图29~图31所示,本实施例的出餐装置,包括安装架e1,安装架e1上安装有升降驱动机构e2,升降驱动机构e2的输出端连接有出餐托盘e3,出餐托盘e3与安装架e1之间连
接有连杆机构e4,连杆机构e4的另一端连接有出餐挡板e5,出餐挡板e5位于出餐托盘e3上方;所述出餐托盘e3上固定有防护槽e8,防护槽e8的一侧设置有取餐缺口e81,防护槽e8具有挡边,能避免餐碗掉落。
110.其中,所述安装架e1包括底座e11,底座e11上连接有立柱e12,立柱e12的另一端连接有安装板e13,连杆机构e4与安装板连接,安装板e13上还连接有安装座e14,升降驱动机构e2安装于安装座e14上。本实用新型的底座e11安装于自动化后厨内部,从而本实用新型可形成自动化后厨的一部分。
111.本实用新型还包括用于探测出餐托盘e3上方是否有餐碗的出餐传感器e9。出餐传感器e9探测到出餐托盘e3上有餐碗时,可将信号发送至控制装置,由控制装置控制升降驱动机构e2动作,保证每次升降出餐托盘e3时其上均有餐碗。
112.本装置安装于自动化后厨的内部,仅出餐挡板e5暴露在外。当盛好餐食的餐碗放置到出餐托盘e3上方后,出餐传感器e9探测到出餐托盘e3上有餐碗并将信号发送至控制装置,由控制装置控制升降驱动机构e2动作。升降驱动机构e2推动出餐托盘e3上升,则餐碗能被推升到出餐口。出餐托盘e3上升的过程中带动连杆机构e4动作,连杆机构e4将出餐挡板e5移开,则顾客能从出餐口顺利取餐。本实用新型的出餐挡板e5仅在出餐托盘e3上升时才联动打开,保证顾客能及时取餐。并且,在未取餐时,出餐挡板e5始终将出餐口封闭,避免顾客将手伸进设备内部,也避免物料顾客无未付费时取餐的情况,还能避免餐食被外界污染。
113.具体地,所述升降驱动机构e2包括电机e21,电机e21安装于安装架e1上,电机e21的输出端连接有电动推杆e22,电动推杆e22的另一端与出餐托盘e3连接。电机e21启动后驱动电动推杆e22升降,电动推动即可将出餐托盘e3推升或降下,操作方便。
114.为了保证餐碗平稳升降,所述安装架e1上固定有导向滑座e6,出餐托盘e3的底部固定有导向杆e7,导向杆e7套设于导向滑座e6内。出餐托盘e3升降的过程中,出餐托盘e3底部的导向杆e7始终在导向滑座e6内移动,从而出餐托盘e3能沿直线稳定移动,保证餐碗在移动过程中的平稳性。
115.所述导向滑座e6和导向杆e7的数量均为两个,两个导向滑座e6分设于升降驱动机构e2的两侧。两个的导向杆e7均对出餐托盘e3进行导向,进一步提高餐碗的平稳性。
116.具体地,所述连杆机构e4包括开合连杆e41,开合连杆e41的一端铰接于出餐托盘e3上,开合连杆e41的另一端铰接有驱动连杆e42,驱动连杆e42的中段与安装架e1铰接,驱动连杆e42的另一端与出餐挡板e5连接。当出餐托盘e3上升时,出餐托盘e3带动开合连杆e41移动,开合连杆e41拉动驱动连杆e42倾转,则出餐挡板e5网远离出餐口的方向移动,从而出餐托盘e3能将餐碗顺利推升至出餐口。当出餐托盘e3降下时,出餐挡板e5反向移动并将出餐口进行遮挡。
117.所述连杆机构e4的数量为两个,出餐托盘e3上设置有凸出杆e31,两个连杆机构e4分别铰接于凸出杆e31的两端。两侧均设置出餐挡板e5,且两块出餐挡板e5上均连接连接机构,可减小单块出餐挡板e5的行程,方便在取餐时将出餐口完全打开。所述出餐托盘e3降下时,出餐挡板e5处于水平位置且两块出餐挡板e5拼合。出餐托盘e3降下时,出餐挡板e5刚好将出餐口遮挡,保证出餐挡板e5能将餐碗与外界隔绝。
118.除此之外,本实用新型的系统还包括控制柜6和电气柜7,各设备通过控制柜6进行精确控制把那个通过电气柜7控制通断。煮面锅4旁设置接水托盘8,用于接洒落的水。台架5
为封闭式的,台架5上设置透明玻璃。台架5内部设置有暂存架9,煮好的面食可暂时放置于暂存架9上。台架5的台面上放置纸巾盒,方便顾客使用。
119.一种自动煮面方法:
120.包括如下步骤:s1:抓取浇头料盒,按正面朝上的方向放置到破口装置内,进行破口;s2:将破口的浇头料盒推进微波炉c2进行加热;s3:加热的浇头料盒推入倒料机构c4内;s4:落碗装置c5将餐碗落入移动机构c6上的餐碗托架c7上;s5:煮制主食,移动机构c6将餐碗托架c7移动到最前端,煮好后由前台机械手3将主食添加到餐碗托架c7上;主食料盒由后台机械手2夹取到破口装置内,并由破口装置进行破口,再由前台机械手3将主食倒入煮面篓内;s5:移动机钩将餐碗托架c7移动到倒料机构c4下方,倒料机构c4将浇头添加到主食上;s7:移动机构c6再将餐碗托架c7移动到最前端,由前台机械手3将餐碗夹取到出餐装置,通过出餐装置出餐。
121.当料盒在物料货架a1内反面放置时,后台机械手2能将料盒夹取到翻面机构a6内,由翻面机构a6翻面后,后台机械手2再将浇头料盒夹取到后台的破口装置进行破口,将面条料盒夹取到前台的破口装置进行破口。破口的浇头料盒被推入微波炉c2内加热,加热后料盒被推到倒料机构c4内。破口的面条料盒被前台机械手3夹取后倒入煮面锅4内的煮面篓内进行煮制。落碗机构一次性落下一个餐碗,移动机构c6将餐碗托架c7移动到落碗装置c5下方,使得餐碗准确落到餐碗托架c7上。移动机构c6再将餐碗移动到最前端,由前台机械手3夹取煮面篓后将面条倒入餐碗内。移动机构c6再将餐碗移动到倒料机构c4下方,由倒料机构c4将加热的浇头倒入餐碗内。移动机构c6再将餐碗移动到最前端,由前台机械手3将餐碗夹取到出餐装置内。当顾客付款后,出餐装置自动将餐碗从出餐口升起,则顾客可将盛装面条的餐碗端走。本实用新型的各步骤可在控制装置的控制下连续进行,实现自动落碗和加料,实现完全自动化,减少了人工劳动,且保证干净卫生。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。