1.本实用新型属于垃圾处理领域,具体为一种无接触医疗垃圾清扫装置。
背景技术:
2.医院中由于人群密集,且病人较多,往往病人不经意间会将垃圾丢弃,从而使得医院内的卫生清洁人员,需要花大量的时间去清理这些垃圾,而由于这些垃圾是病人丢弃,往往会携带有大量的细菌,这就会造成卫生清洁人员有相当大的隐藏威胁,卫生清洁人员,需要使用扫帚簸箕等弯腰清理垃圾,携带工具多,工作量大。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种无接触医疗垃圾清扫装置,通过在箱体上安装控制开关,无需弯腰工作即可通过开关控制第一驱动电机驱动刷辊将垃圾刷入箱体内无需携带多种卫生工具。
4.本实用新型通过以下技术方案实现:
5.一种无接触医疗垃圾清扫装置,包括,
6.箱体,所述箱体一端面为敞开结构,位于敞开结构内安装有刷辊,所述刷辊通过转轴传动连接于第一驱动电机,所述第一驱动电机固定连接于箱体外壁上;
7.手柄,所述手柄固定连接于箱体上,所述手柄上设有第一控制开关;
8.位于箱体上方设有控制箱,所述控制箱内设有控制器、电源,所述控制器电性连接于电源,所述第一控制开关电性连接于控制器,所述控制器电性连接于第一驱动电机。
9.进一步地,所述刷辊设有两根,所述两根刷辊上、下平行设置且两根刷辊上的刷毛间隔设置。
10.进一步地,所述控制箱内还设有三轴陀螺仪传感器,所述三轴陀螺仪传感器电性连接于控制器,
11.进一步地,所述箱体位于敞开结构的相对端设有翻板门,所述翻板门铰接固定于箱体,所述翻板门内通过曲柄连杆结构传动连接于第二驱动电机输出端,所述手柄上还固定连接有第二控制开关,所述第二控制开关、第二驱动电机电性连接于控制器。
12.进一步地,所述箱体两侧固定连接有滚轮。
13.本实用新型的有益效果是;
14.一、本实用新型结构简单易于制造,通过第一控制开关连接控制器,通过控制器控制第一驱动电机驱动刷辊可以方便的将垃圾清扫入箱体内。
15.二、通过将刷辊设置为平行的两根,两根刷辊上的刷毛间隔设置,使得两根刷辊相互配合可以更好的将垃圾清扫入箱体。
16.三、通过设置三轴陀螺仪传感器,感应箱体的倾斜度,当第一控制开关打开后无需再次启动,只需切斜箱体,即可使得控制器控制第一驱动电机驱动刷辊工作。
17.四、通过设置翻板门,利用第二控制开关控制第二驱动电机通过曲柄连杆来控制
其启闭,倾倒箱体内垃圾时,只需控制翻板门打开即可将箱体内垃圾倒出无需手动接触,更为安全。
18.五、通过安装滚轮,无需一直手提清扫装置,只需推着即可。
附图说明
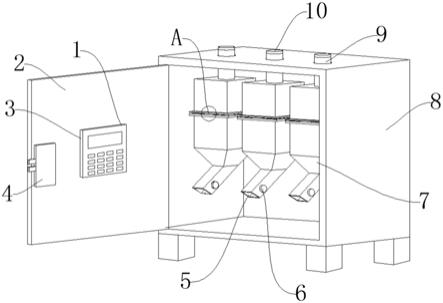
19.图1为本实用新型结构示意图。
20.图2为本实用新型连接俯视结构示意图。
具体实施方式
21.下面结合附图对本发明进行详细的介绍。
22.如图1~2所示,本实用新型提供了一种无接触医疗垃圾清扫装置,包括,
23.箱体10,所述箱体10一端面为敞开结构,位于敞开结构内安装有刷辊101,所述刷辊101通过转轴传动连接于第一驱动电机102,所述第一驱动电机102固定连接于箱体10外壁上;
24.手柄20,所述手柄20固定连接于箱体10上,所述手柄20上设有第一控制开关201;
25.位于箱体10上方设有控制箱30,所述控制箱30内设有控制器、电源,所述控制器电性连接于电源,所述第一控制开关201电性连接于控制器,所述控制器电性连接于第一驱动电机102。
26.具体来说,通过第一控制开关201电性连接控制器从而控制第一驱动电机102工作,无需携带多种清洁工具,通过刷辊101即可将垃圾扫入箱体10具体如何设置为现有技术,本专利不做详述。
27.进一步的,为了刚好的进行清理,所述刷辊101设有两根,所述两根刷辊101上、下平行设置且两根刷辊101上的刷毛间隔设置。
28.进一步的,为了避免重复开启按压开关,所述控制箱30内还设有三轴陀螺仪传感器,所述三轴陀螺仪传感器电性连接于控制器,这样可以通过三轴陀螺仪传感器测量箱体10的倾斜角度即可反馈信号给于控制器,控制器控制第一驱动电机102驱动刷辊101工作。
29.进一步的,为了方便的进行垃圾的倾倒,所述箱体10位于敞开结构的相对端设有翻板门103,所述翻板门103铰接固定于箱体10,所述翻板门103内通过曲柄连杆结构传动连接于第二驱动电机104输出端,所述第二驱动电机安装于箱体10内部,所述手柄20上还固定连接有第二控制开关105,所述第二控制开关105、第二驱动电机104电性连接于控制器。
30.进一步的,为了方便携带该清扫工具,无需手提,所述箱体10两侧固定连接有滚轮106,这样只需推着即可。
31.本专利中,控制器可采用arduino uno芯片配合9110s电机驱动、uno芯片扩展版,三轴陀螺仪采用mpu-9250,第一驱动电机、第二驱动电机采用型号n20,电源采用hjbp11.1v直流电源,具体控制程序为现有技术此处不进行详述。
技术特征:
1.一种无接触医疗垃圾清扫装置,其特征在于,包括,箱体(10),所述箱体(10)一端面为敞开结构,位于敞开结构内安装有刷辊(101),所述刷辊(101)通过转轴传动连接于第一驱动电机(102),所述第一驱动电机(102)固定连接于箱体(10)外壁上;手柄(20),所述手柄(20)固定连接于箱体(10)上,所述手柄(20)上设有第一控制开关(201);位于箱体(10)上方设有控制箱(30),所述控制箱(30)内设有控制器、电源,所述控制器电性连接于电源,所述第一控制开关(201)电性连接于控制器,所述控制器电性连接于第一驱动电机(102)。2.根据权利要求1所述的一种无接触医疗垃圾清扫装置,其特征在于,所述刷辊(101)设有两根,所述两根刷辊(101)上、下平行设置且两根刷辊(101)上的刷毛间隔设置。3.根据权利要求1所述的一种无接触医疗垃圾清扫装置,其特征在于,所述控制箱(30)内还设有三轴陀螺仪传感器,所述三轴陀螺仪传感器电性连接于控制器。4.根据权利要求1所述的一种无接触医疗垃圾清扫装置,其特征在于,所述箱体(10)位于敞开结构的相对端设有翻板门(103),所述翻板门(103)铰接固定于箱体(10),所述翻板门(103)内通过曲柄连杆结构传动连接于第二驱动电机(104)输出端,所述手柄(20)上还固定连接有第二控制开关(105),所述第二控制开关(105)、第二驱动电机(104)电性连接于控制器。5.根据权利要求1所述的一种无接触医疗垃圾清扫装置,其特征在于,所述箱体(10)两侧固定连接有滚轮(106)。
技术总结
本实用新型一种无接触医疗垃圾清扫装置,包括,箱体,所述箱体一端面为敞开结构,位于敞开结构内安装有刷辊,所述刷辊通过转轴传动连接于第一驱动电机,所述驱动电机固定连接于箱体外壁上;手柄,所述手柄固定连接于箱体上,所述手柄上设有第一控制开关;位于箱体上方设有控制箱,所述控制箱内设有控制器、电源,所述控制器电性连接于电源,所述第一控制开关电性连接于控制器,所述控制器电性连接于第一驱动电机。本实用新型结构简单易于制造,通过第一控制开关连接控制器,通过控制器控制第一驱动电机驱动刷辊可以方便的将垃圾清扫入箱体内。机驱动刷辊可以方便的将垃圾清扫入箱体内。机驱动刷辊可以方便的将垃圾清扫入箱体内。
技术研发人员:苗艳飞 陶思远 苏梓宸
受保护的技术使用者:淮安市第一人民医院
技术研发日:2021.10.08
技术公布日:2022/3/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。