技术特征:
1.基于ar智能眼镜的仓库管理系统,其特征在于,包括:控制器(1),用于根据仓库区域内货架的货位信息以及包裹信息发出拆包或者封包的控制指令,以及用于将执行控制指令的结果发送至服务器(3)以及传输至ar眼镜(2)进行显示;ar眼镜(2),ar眼镜与控制器电性连接,ar眼镜佩戴者用于根据接收的拆包控制指令采用ar眼镜扫描所述仓库区域内包裹上的二维码,获取与所述二维码对应的包裹基本信息的展示图像,并根据所述展示图像以及仓库的3d建模模型完成拆包作业;以及,用于根据接收的封包控制指令采用ar眼镜展示需要封包包裹对应货架区域位置的3d建模模型,利用展示的所述3d建模模型完成封包作业;服务器(3),与所述控制器通过通讯网络连接,用于根据接收的执行控制指令的结果实时更新仓库区域内不同货架上的货位信息、包裹信息以及包裹内对应的货物信息以及用于实时存储的仓库内的3d建模模型。2.根据权利要求1所述的基于ar智能眼镜的仓库管理系统,其特征在于,所述展示图像内包括对应包裹的货架位置、包裹内的货物清单以及对应货物的体积大小。3.根据权利要求2所述的基于ar智能眼镜的仓库管理系统,其特征在于,所述ar眼镜(2)包括存储并运行于ar眼镜中拆包模块(21),所述拆包模块(21)包括:第一扫描单元(211),用于扫描包裹二维码获取展示图像;第一确认单元(212),用于通过ar眼镜显示的展示图像确认包裹基本信息无误后,在ar眼镜显示的操作界面中确认进行拆包作业;第一选择单元(213),用于在展示的3d建模模型选择对应的包裹;第一查询单元(214),用于查询当前货架的空货位的数量以及位置;第一处理单元(215),用于根据对获取的选择包裹的包裹信息、空货位的数量以及位置进行处理,提供若干个拆包可选方案;第一包裹生成单元(216),用于用户根据若干个拆包可选方案选择拆包方案,将拆包后的每个货物信息与对应的货架位置进行关联绑定生成新包裹的二维码。4.根据权利要求2所述的基于ar智能眼镜的仓库管理系统,其特征在于,所述ar眼镜包括存储并运行于ar眼镜中封包模块(22),所述封包模块包括:信息接收单元(221),用于接收控制器的封包指令获取需要进行封包的包裹基本信息;第二处理单元(222),用于根据包裹基本信息以及3d建模模型生成查找路径;指引单元(223),用于通过ar眼镜显示的查找路径找到包裹的位置;第二扫描单元(224),用于逐一扫描需要封包的包裹二维码获取对应的展示图像;第二确认单元(225),用于通过ar眼镜显示的展示图像确认包裹基本信息无误后,确认取出货物;第二选择单元(226),用于通过ar眼镜显示的3d建模模型并根据需要封包的包裹信息选择空货位以及通过ar眼镜显示的操作界面选择封包作业;第二包裹生成单元(227),用于根据封包作业将选择的空货位的货位位置与需要封包的货物信息进行关联绑定生成新包裹的二维码。5.根据权利要求1所述的基于ar智能眼镜的仓库管理系统,其特征在于,所述通讯网络采用移动网络、无线网络或互联网络。
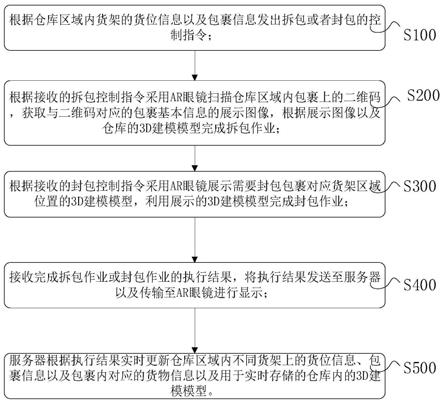
6.基于ar智能眼镜的仓库管理系统的实现方法,其特征在于,包括以下步骤:根据仓库区域内货架的货位信息以及包裹信息发出拆包或者封包的控制指令;根据接收的拆包控制指令采用ar眼镜扫描所述仓库区域内包裹上的二维码,获取与所述二维码对应的包裹基本信息的展示图像,根据所述展示图像以及仓库的3d建模模型完成拆包作业;以及,根据接收的封包控制指令采用ar眼镜展示需要封包包裹对应货架区域位置的3d建模模型,利用展示的所述3d建模模型完成封包作业;接收完成拆包作业或封包作业的执行结果,将执行结果发送至服务器以及传输至ar眼镜进行显示;服务器根据执行结果实时更新仓库区域内不同货架上的货位信息、包裹信息以及包裹内对应的货物信息以及用于实时存储的仓库内的3d建模模型。7.根据权利要求6所述的基于ar智能眼镜的仓库管理系统的实现方法,其特征在于,根据接收的拆包控制指令采用ar眼镜扫描所述仓库区域内包裹上的二维码,获取与所述二维码对应的包裹基本信息的展示图像,根据所述展示图像以及仓库的3d建模模型完成拆包作业,具体包括:扫描包裹二维码获取展示图像;通过ar眼镜显示的展示图像确认包裹基本信息无误后,在ar眼镜显示的操作界面中确认进行拆包作业;在ar眼镜显示中展示的3d建模模型选择对应的包裹;查询当前货架的空货位的数量以及位置;根据对获取的选择包裹的包裹信息、空货位的数量以及位置进行处理,提供若干个拆包可选方案;根据若干个拆包可选方案选择拆包方案,将拆包后的每个货物信息与对应的货架位置进行关联绑定生成新包裹的二维码。8.根据权利要求6所述的基于ar智能眼镜的仓库管理系统的实现方法,其特征在于,根据接收的封包控制指令采用ar眼镜展示需要封包包裹对应货架区域位置的3d建模模型,利用展示的所述3d建模模型完成封包作业,具体包括:接收封包指令获取需要进行封包的包裹基本信息;根据包裹基本信息以及3d建模模型生成查找路径;通过ar眼镜显示的查找路径找到包裹的位置;逐一扫描需要封包的包裹二维码获取对应的展示图像;通过ar眼镜显示的展示图像确认包裹基本信息无误后,确认取出货物;通过ar眼镜显示的3d建模模型并根据需要封包的包裹信息选择空货位以及通过ar眼镜显示的操作界面选择封包作业;根据封包作业将选择的空货位的货位位置与需要封包的货物信息进行关联绑定生成新包裹的二维码。
技术总结
本发明公开了基于AR智能眼镜的仓库管理系统,该系统包括:控制器根据仓库区域内货架的货位信息以及包裹信息发出拆包或者封包的控制指令,AR眼镜扫描仓库区域内包裹上的二维码,获取与二维码对应的包裹基本信息的展示图像,并根据展示图像以及仓库的3D建模模型完成拆包作业;以及采用AR眼镜展示需要封包包裹对应货架区域位置的3D建模模型,利用展示的3D建模模型完成封包作业,最后将拆包作业和封包作业执行后结果发送至服务器以及传输至AR眼镜进行显示。本发明通过AR眼镜投射显示AR画面的方式,直接显示货架中货位信息以及包裹内所含的货物信息,并通过连接到AR眼镜上的控制器对显示画面进行操作,实现对包裹的拆包、封包操作,提高了操作效率,让仓库管理系统的使用更加直观、易用、透明、安全。安全。安全。
技术研发人员:张浩 骆青 杨凯
受保护的技术使用者:西信科技有限公司
技术研发日:2021.10.22
技术公布日:2022/3/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。