1.本发明涉及危险品检测仪器领域,更具体地,涉及一种可用于远距离人体隐藏危险品检测仪的机器学习目标检测方法。
背景技术:
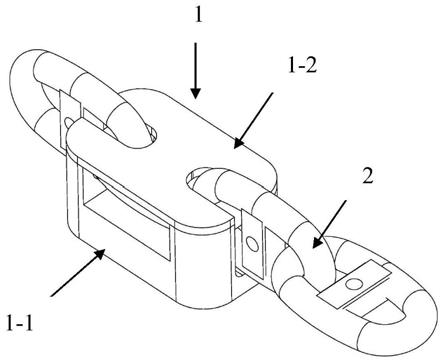
2.由于毫米波可以穿透大部分衣物,利用毫米波可以检测隐藏在人体衣物内的危险品。有研究者提出了一种远距离毫米波检测仪,其主要结构示意图如图1所示,其中大型透镜天线发出的电磁波经人体目标反射后,反射回波由探测器所接收。在这种检测仪中,当人体携带有危险品时,人体回波与不携带危险品时的回波有差异,利用这种差异即可实现远距离人体隐藏危险品检测。由于人体的微动特征,在多数情况下回波的差异不够明显,往往呈现出某一特殊分布,以往的途径是采用一个阈值检测算法,阈值检测算法中高于阈值的判断为携带危险品,低于阈值的判断为未携带危险品;如图2所示,横轴为采集到的波形数据1,纵轴为采集到的波形数据2,深色和浅色圆点分别对应携带有危险品和未携带危险品的情形,中间的直线为可用的阈值检测线,当携带有危险品和未携带有危险品的数据不存在直线可以分离的界限时,这种阈值检测方法的检测准确率较低,不能在实际检测中发挥作用。在本项发明中,通过设计一种用于人体隐藏危险品检测仪的机器学习目标检测方法,可以提高检测仪的检测准确率,促进检测仪的实际应用。
技术实现要素:
3.本发明提供了一种用于人体隐藏危险品检测仪的机器学习目标检测方法,可以克服传统检测仪所使用的阈值检测方法检测结果不准确的缺点。
4.本发明的技术方案如下:一种用于人体隐藏危险品检测仪的机器学习目标检测方法,其特征在于步骤如下:一,从人体隐藏危险品检测仪中获取波形数据,并对波形数据进行处理,得到数据样本;二,将步骤一中得到的数据样本训练出机器学习模型;三,利用步骤二训练出的机器学习模型,进行未知标签的样本检测,最后得出检测结果。
5.步骤一中,从远距离危险品检测仪中获取的波形数据为回波波形数据,所述回波波形数据至少包括同极化波形数据和交叉极化波形数据。
6.步骤一中,对回波波形数据进行处理的过程为:首先将同极化波形数据和交叉极化波形数据分别进行傅里叶变换,然后分别提取得到同极化数据特征和交叉极化数据特征,将同极化波形数据和交叉极化波形数据的特征合并后成为数据特征;每一次检测得到的数据特征与该次检测的数据标签共同构成一组数据样本,多组数据样本形成数据样本集。
7.对于人体隐藏危险品检测仪采集到的回波波形数据具有高于两个种类的波形数据时,对回波波形数据进行处理的过程为:将n个种类的波形数据分别进行傅里叶变换,再分别提取得到对应的数据特征,然后将n个种类波形数据的特征合并为数据特征;再将每一次检测得到的数据特征与该次检测的数据标签共同构成一组数据样本,多组数据样本形成数据样本集;其中,n>2。
8.步骤二中,所述数据样本集划分成训练样本集和测试样本集。
9.进一步的,对于数据样本集,首先根据机器学习算法目的进行数据特征分析,确定相应的机器学习模型,再对机器学习模型设置参数,然后将所述训练样本集输入到机器学习模型中进行训练,训练后得到训练后模型。
10.进一步的,将所述测试样本集输入到训练后模型中进行测试,得到测试结果,再根据测试结果调整机器学习模型和参数,再次把训练样本集输入机械学习模型进行再一轮训练,训练后,再次将测试样本集输入到训练后模型,直到训练后模型的测试效果达标为止。
11.所述机械学习模型用于数据分类,用于数据分类的分类模型包括有:最邻近节点模型、逻辑分类模型、随机森林分类模型、决策树分类模型、梯度提升分类模型、高斯朴素贝叶斯模型、线性判别分析模型、二次判别分析模型、支持向量机模型、多项式分布朴素贝叶斯模型;步骤二中所述的机械学习模型选择所述分类模型中任意一种。
12.步骤三中,将从人体隐藏危险品检测仪采集到的未知标签的回波数据,按照步骤一的处理得到对应的数据特征,将得到的数据特征输入到训练后模型,获得预测结果,所述预测结果即为使用机器学习目标检测方法获得的结果。
13.所述人体隐藏危险品检测仪所使用的电磁波可以是毫米波、太赫兹波或其他频段的电磁波。
14.本发明的有益效果如下:本发明适用于处理携带危险品和未携带危险品的二分类问题,也适用于处理多种不同种类危险品的多分类问题,可以克服传统检测仪所使用的阈值检测方法检测结果不准确的缺点。
附图说明
15.图1为背景技术中的远距离人体危险品检测仪的结构示意图。
16.图2为背景技术中的阈值检测方法的示意图。
17.图3为本发明中获取数据样本的示意图。
18.图4为本发明中机器学习模型训练步骤的示意图。
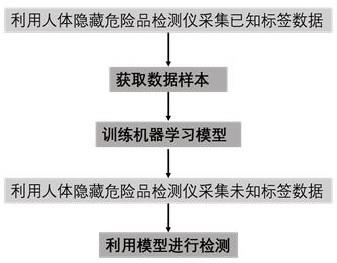
19.图5为本发明的实施流程图。
具体实施方式
20.如图5所示,一种用于人体隐藏危险品检测仪的机器学习目标检测方法,其检测实施过程为:首先,需要利用远距离人体隐藏危险品检测仪采集已知标签的样本的回波波形数据,这些样本可以是人体携带隐藏危险品和未携带隐藏危险品的情形,再利用采集到的回波波形数据得到数据样本;然后,将这些数据样本输入到机器学习模型进行训练得到训练
后模型,最后利用训练后模型对人体隐藏危险品检测仪采集的未知标签的数据进行检测,得到检测结果。
21.具体的,采集到的回波波形数据至少包括同极化波形数据和交叉极化波形数据。
22.其中,如图3所示,当回波波形数据仅包括同极化波形数据和交叉极化波形数据时,进行处理的过程为:首先将两种波形数据分别进行傅里叶变换,分别提取得到同极化数据特征和交叉极化数据特征,然后将同极化波形数据和交叉极化波形数据的特征合并后成为数据特征;每一次检测得到的数据特征与该次检测的数据标签共同构成一组数据样本,多组数据样本则形成数据样本集。
23.其中,当回波波形数据具有n个种类的波形数据时,n>2,同样分别进行傅里叶变换,再分别提取得到对应的数据特征,将提取得到的n个种类波形数据的特征合并为数据特征;再将每一次检测得到的数据特征与该次检测的数据标签共同构成一组数据样本,多组数据样本形成数据样本集。
24.其中,所述机械学习模型是用于数据分类的分类模型,常见的分类模型包括:最邻近节点模型、逻辑分类模型、随机森林分类模型、决策树分类模型、梯度提升分类模型、高斯朴素贝叶斯模型、线性判别分析模型、二次判别分析模型、支持向量机模型、多项式分布朴素贝叶斯模型。所述机械学习模型可选择上述分类模型中的任意一种。
25.如图4所示,具体的训练过程为:首先,将形成的数据样本集划分成训练样本集和测试样本集。
26.同时,根据机器学习算法目的对数据样本集进行数据特征分析,确定相应的机器学习模型并设置参数,然后将数据样本集中的训练样本集输入到机器学习模型中进行训练,得到训练后模型。
27.然后,将数据样本集中的测试样本集输入到训练后模型中进行测试,得到测试结果,根据测试结果调整机器学习模型和参数,然后再次把训练样本集输入机械学习模型进行再一轮训练,训练后,再次将测试样本集输入到训练后模型,循环训练和测试,直到训练后模型的测试效果达标为止。
28.利用训练后模型将从人体隐藏危险品检测仪采集到的未知标签的回波数据,进行处理得到对应的数据特征,将得到的数据特征输入到训练后模型,获得预测结果,所述预测结果即为使用机器学习目标检测方法获得的结果。
29.所述人体隐藏危险品检测仪所使用的电磁波可以是毫米波、太赫兹波或其他频段的电磁波。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。