技术特征:
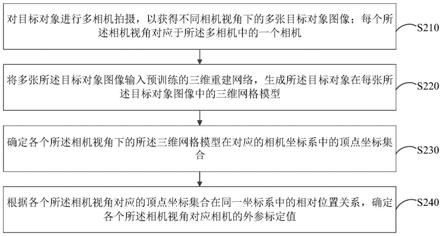
1.一种相机外参标定方法,其特征在于,所述方法包括:对目标对象进行多相机拍摄,以获得不同相机视角下的多张目标对象图像;每个所述相机视角对应于所述多相机中的一个相机;将多张所述目标对象图像输入预训练的三维重建网络,生成所述目标对象在每张所述目标对象图像中的三维网格模型;确定各个所述相机视角下的所述三维网格模型在对应的相机坐标系中的顶点坐标集合;根据各个所述相机视角对应的顶点坐标集合在同一坐标系中的相对位置关系,确定各个所述相机视角对应相机的外参标定值。2.根据权利要求1所述的相机外参标定方法,其特征在于,所述根据各个所述相机视角对应的顶点坐标集合在同一坐标系中的相对位置关系,确定各个所述相机视角对应相机的外参标定值,包括;将各个所述相机视角中的其中一个相机视角作为基准相机视角;基于所述基准相机视角对应的顶点坐标集合与各个所述相机视角对应的顶点坐标集合之间的顶点位置差异,确定各个所述相机视角对应相机的外参标定值。3.根据权利要求2所述的相机外参标定方法,其特征在于,所述基于所述基准相机视角对应的顶点坐标集合与各个所述相机视角对应的顶点坐标集合之间的顶点位置差异,确定各个所述相机视角对应相机的外参标定值,包括;分别求解将各个所述相机视角对应的顶点坐标集合对齐到所述基准相机视角对应的顶点坐标集合所在坐标系上时所需的刚体变换;将求解得到的各个所述相机视角对应的刚体变换,作为各个所述相机视角对应相机的外参标定值。4.根据权利要求1-3中任一项所述的相机外参标定方法,其特征在于,所述根据各个所述相机视角对应的顶点坐标集合在同一坐标系中的相对位置关系,确定各个所述相机视角对应相机的外参标定值的步骤之后,还包括;将多张所述目标对象图像输入预训练的关键点检测网络,得到所述目标对象在每张所述目标对象图像中的二维关键点;基于各个所述相机视角对应的所述二维关键点的位置信息,对各个所述相机视角对应相机的外参标定值进行优化,得到各个所述相机视角对应相机的优化外参标定值。5.根据权利要求4所述的相机外参标定方法,其特征在于,所述基于各个所述相机视角对应的所述二维关键点的位置信息,对各个所述相机视角对应相机的外参标定值进行优化,得到各个所述相机视角对应相机的优化外参标定值,包括;基于多张所述目标对象图像,确定各个所述相机视角下的所述二维关键点在对应的图像坐标系中的关键点二维坐标;在各个所述相机视角对应的顶点坐标集合中,确定各个所述相机视角下的所述二维关键点在对应的相机坐标系中的关键点三维坐标;根据各个所述相机视角对应的所述关键点三维坐标和各个所述相机视角下对应的所述关键点二维坐标,对各个所述相机视角对应相机的外参标定值进行优化,得到各个所述相机视角对应相机的优化外参标定值。
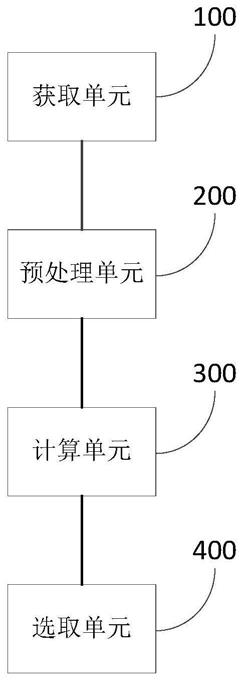
6.根据权利要求5所述的相机外参标定方法,其特征在于,所述根据各个所述相机视角对应的所述关键点三维坐标和各个所述相机视角下对应的所述关键点二维坐标,对各个所述相机视角对应相机的外参标定值进行优化,得到各个所述相机视角对应相机的优化外参标定值,包括;根据各个所述相机视角对应的所述关键点三维坐标和各个所述相机视角下对应的所述关键点二维坐标,确定各个所述相机视角对应的相机在采用所述外参标定值时的投影误差;所述投影误差为所述相机视角对应的相机将所述关键点三维坐标投影至所述相机的像平面而得到的二维坐标与所述关键点二维坐标之间的误差;基于各个所述相机视角对应的相机在采用所述外参标定值时的投影误差,对各个所述相机视角对应相机的所述外参标定值进行调整,得到各个所述相机视角对应相机的调整后外参标定值,作为各个所述相机视角对应相机的优化外参标定值;其中,所述相机视角对应的相机在采用所述优化外参标定值时的投影误差满足预设条件。7.根据权利要求6所述的相机外参标定方法,其特征在于,所述根据各个所述相机视角对应的所述关键点三维坐标和各个所述相机视角下对应的所述关键点二维坐标,确定各个所述相机视角对应的相机的投影误差,包括:通过预设的投影函数和各个所述相机视角对应相机的外参标定值,分别将各个所述相机视角对应的所述关键点三维坐标投影至对应相机的像平面上,得到各个所述相机视角对应的所述二维关键点在对应所述相机的像平面上的投影点;确定各个所述相机视角对应的所述投影点在对应的图像坐标系中的投影点二维坐标;根据每个所述相机视角对应的所述投影点二维坐标和对应的所述关键点二维坐标之间的差异,确定各个所述相机视角对应的相机的投影误差。8.一种相机外参标定装置,其特征在于,包括:获取单元,被配置为执行对目标对象进行多相机拍摄,以获得不同相机视角下的多张目标对象图像;每个所述相机视角对应于所述多相机中的一个相机;重建单元,被配置为执行将多张所述目标对象图像输入预训练的三维重建网络,生成所述目标对象在每张所述目标对象图像中的三维网格模型;确定单元,被配置为确定各个所述相机视角下的所述三维网格模型在对应的相机坐标系中的顶点坐标集合;标定单元,被配置为执行根据各个所述相机视角对应的顶点坐标集合在同一坐标系中的相对位置关系,确定各个所述相机视角对应相机的外参标定值。9.一种电子设备,其特征在于,包括:处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现如权利要求1至7中任一项所述的相机外参标定方法。10.一种存储介质,当所述存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1至7中任一项所述的相机外参标定方法。
技术总结
本公开关于一种相机外参标定方法、装置、电子设备及存储介质,所述方法包括:对目标对象进行多相机拍摄,以获得不同相机视角下的多张目标对象图像;每个所述相机视角对应于所述多相机中的一个相机;通过预训练的三维重构网络,生成所述目标对象在每张所述目标对象图像中的三维网格模型;确定各个所述相机视角下的所述三维网格模型在对应的相机坐标系中的顶点坐标集合;根据各顶点坐标集合在同一坐标系中的相对位置关系,确定各个所述相机视角对应相机的外参标定值。采用所述方法可以提高在每次改变相机配置后对多相机外参进行标定时的效率。效率。效率。
技术研发人员:曹炎培
受保护的技术使用者:北京达佳互联信息技术有限公司
技术研发日:2020.08.20
技术公布日:2022/3/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。