1.本实用新型涉及康复训练技术领域,特别涉及一种康复训练设备。
背景技术:
2.随着健康意识及经济水平的提升,越来越多的训练者选择借助康复医疗训练设备对关节或肢体进行康复训练。
3.现有的康复医疗训练设备通常包括阻尼组件和提拉绳索,阻尼组件由若干铁锭砝码堆叠而成,阻尼组件与提拉绳索相连,使阻尼组件通过提拉绳索为训练者提供阻尼力,达到训练目的。训练者可按自身的训练目的通过增加、减少或改变砝码来调节阻尼力。然而,训练者在安装及搬运砝码的过程中,极易被意外坠落的砝码砸伤,存在极大的安全隐患。此外,由多个砝码组合而成的阻尼组件会使整套康复医疗训练设备的重量变重,且占用空间过大,不方便训练者转运。
4.因此,如何优化现有康复训练设备以提升其安全性及转运便捷性使本领域技术人员需解决的技术问题。
技术实现要素:
5.有鉴于此,本实用新型的目的在于提供一种康复训练组件,通过调节阻尼调节组件的电流自动调整阻尼电机输出的阻尼力,训练者通过摆动组件克服阻尼电机的阻尼力做功来实现关节训练,无需拆装砝码,训练较安全,且转运较便捷。
6.本实用新型所提供的康复训练设备,包括:
7.摆动组件;
8.阻尼调节组件;
9.设于摆动组件与阻尼调节组件之间的阻尼电机;
10.与阻尼调节组件相连的控制组件;控制组件用于根据输入的预设电流控制阻尼调节组件向阻尼电机施加预设阻尼力来阻止摆动组件往复摆动。
11.优选的,还包括连接于摆动组件与阻尼电机之间的齿轮传动组件。
12.优选的,还包括:
13.用于检测阻尼电机的旋转角度的角度传感器;
14.计时器;
15.控制组件分别与角度传感器及计时器相连,控制组件用于根据角度传感器及计数器二者所反馈的信号计算出摆动组件的做功量。
16.优选的,还包括与阻尼电机相连的蓄电组件。
17.优选的,还包括与控制组件相连的阻尼调节按钮,控制组件用于根据阻尼调节按钮输入的增大信号或减小信号对应地增大或减小阻尼调节组件的电流。
18.优选的,还包括与控制组件相连的显示屏。
19.优选的,阻尼调节组件包括:
20.与控制组件相连的恒流源电路;
21.da转换器;
22.连接于恒流源电路与da转换器之间并用于提高恒流源电路驱动能力的缓冲器;
23.与da转换器相连并用于提供稳定的直流电源的参考电源。
24.相对于背景技术,本实用新型所提供的康复训练组件,包括摆动组件、阻尼调节组件、阻尼电机及控制组件,阻尼电机设于摆动组件与阻尼调节组件之间,控制组件与阻尼调节组件相连。
25.当控制组件接收到输入的预设电流时,控制组件将阻尼调节组件的当前电流调整至预设电流,阻尼调节组件向阻尼电机施加预设负载,使阻尼电机以预设阻尼力阻止摆动组件往复摆动,使摆动组件通过克服预设阻尼力做功来实现关节训练。
26.本实用新型通过改变阻尼组件的类型,取代现有的砝码式阻尼调节组件,通过调节阻尼调节组件的电流自动调节阻尼电机的阻尼力,灵活满足不同训练者的训练需求,避免搬运诸多砝码,操作省时省力,可避免砝码砸伤训练者,还可从根本上减小整套设备的重量及占用空间,因此安全性较高且转运较方便。
附图说明
27.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
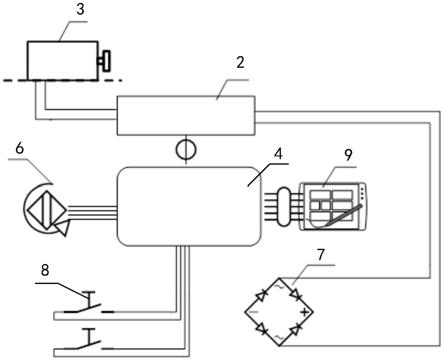
28.图1为本实用新型实施例所提供的康复训练设备的结构简图;
29.图2为图1中摆动组件、同步带及齿轮传动组件的装配图;
30.图3为图1中阻尼电机与蓄电组件的电路原理图;
31.图4为图1中角度传感器、控制组件及阻尼调节按钮的电路原理图;
32.图5为图1显示屏的电路原理图;
33.图6为图1中阻尼调节组件的电路原理图。
34.附图标记如下:
35.摆动组件1、阻尼调节组件2、阻尼电机3、控制组件4、齿轮传动组件5、角度传感器6、蓄电组件7、阻尼调节按钮8和显示屏9。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.为了使本技术领域的技术人员更好地理解本实用新型方案,下面结合附图和具体实施例对本实用新型作进一步的详细说明。
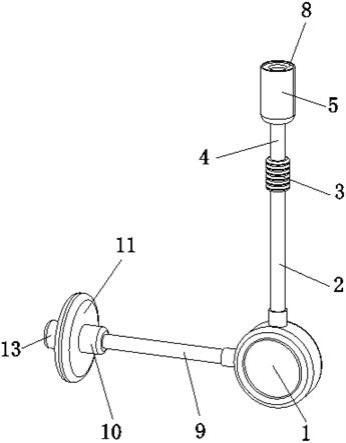
38.请参考图1至图2,图1为本实用新型实施例所提供的康复训练设备的结构简图;图2为图1中摆动组件、同步带及齿轮传动组件的装配图。
39.本实用新型实施例公开了一种康复训练设备,包括摆动组件1、阻尼调节组件2、阻尼电机3和控制组件4。
40.摆动组件1包括摆动轴和固套于摆动轴的摆动杆,摆动杆可以是手持式或脚蹬式,用于引导训练者手臂或腿部往复摆动。
41.阻尼电机3设于摆动组件1与阻尼调节组件2之间,阻尼调节组件2与控制组件4相连,阻尼调节组件2是由多个电子元件组成的电控模块,可通过调节自身电流来调节施加至阻尼电机3的负载,由此调节阻尼电机3输出的阻尼力。训练者通过操纵摆动组件1驱动阻尼电机3运转时,阻尼电机3内部产生感应电动势,使阻尼电机3带动阻尼调节组件2做功,阻尼调节组件2产生的负载越大,阻尼电机3输出的阻尼力就越大。
42.当控制组件4接收到输入的预设电流时,控制组件4将阻尼调节组件2的当前电流调整至预设电流,阻尼调节组件2向阻尼电机3施加预设负载,使阻尼电机3以预设阻尼力阻止摆动组件1往复摆动,使摆动组件1通过克服预设阻尼力做功来实现关节训练。
43.预设电流是指阻尼电机3向摆动组件1施加的阻尼力最佳时阻尼调节组件2的电流。预设电流可以通过触摸屏直接输入至控制组件4,还可以通过触发开关反馈至控制组件4,又可以是通过传感器等检测件反馈至控制组件4,预设电流的输入方式在此不做具体限定。预设负载是指阻尼调节组件2在预设电流下向阻尼电机3所施加的负载。预设阻尼力是指适应于训练者的最佳阻尼力,预设电流与预设阻尼力之间的对应关系可预先输入至控制组件4中。
44.需特别指明的是,相较于现有砝码仅能为摆动组件1提供单向阻尼力,本实用新型通过增设阻尼调节组件2,使阻尼电机3可在摆动组件1正向摆动时提供正向阻尼力,还可在摆动组件1反向摆动时提供反向阻尼力,也即阻尼电机3可为摆动组件1提供双向阻尼力,使摆动组件1往复摆动一次可实现两次训练,训练强度增大,训练效率较高。
45.综上所述,本实用新型的关键发明点在于改变阻尼组件的类型,取代现有的砝码式阻尼调节组件2,通过调节阻尼调节组件2的电流自动调节阻尼电机3的阻尼力,灵活满足不同训练者的训练需求,避免搬运诸多砝码,操作省时省力,可避免砝码砸伤训练者,还可从根本上减小整套设备的重量及占用空间,因此,本实用新型所提供的康复训练设备的安全性较高,且转运较方便。此外,阻尼调节组件2的设置还有利于实现轻量化。
46.具体地,控制组件4具体为单片机u6,单片机u6的vcc引脚通过电容c19接地,确保单片机u6安全运行。电容c19为vcc引脚提供稳定的5v电压。单片机u6的其他引脚连接方式可参考下述内容。
47.请参考图6,图6为图1中阻尼调节组件的电路原理图。
48.阻尼调节组件2包括参考电源u3、da转换器u2、缓冲器和恒流源电路。
49.参考电路u3可产生5v的直流电压源,为其余三者提供稳定的直流电压源。参考电源u3的型号具体可以是ref-195,但其型号不限于此。参考电源u3的vs供电输入引脚通过电容c13接地,其sleep休眠引脚与vs供电输入引脚相连,vs供电输入引脚与cnd引脚之间设有电容c14。参考电源u3的output供输出引脚分别与da转换器u2的vref引脚及vdd引脚相连,使参考电源u3为da转换器u2提供稳定的5v直流电压源,output供输出引脚分别通过并联的电容c15和电容c16接地。da转换器u2的vouta引脚通过输入匹配电阻r4与缓冲器相连,利用输入匹配电阻r4提升阻尼调节组件2的运算精度。
50.da转换器u2的clr引脚与单片机u6的p3.7/int3/txd 2/ccp2/ccp2_2引脚相连,da转换器u2的din引脚与单片机u6的p3.6/int2/rxd_2/ccp1_2引脚相连,da转换器u2的sclk引脚与单片机u6的p3.3/int1引脚相连,da转换器u2的sync引脚与单片机u6的p3.2/int0引脚相连。
51.缓冲器用于提高恒流源电路驱动能力,由运算放大器u5a和电阻r2组成。恒流源电路由运算放大器u5b、电阻r3、场效管q1、电流采样电阻r6组成,用于根据控制组件4反馈的恒定预设电流使阻尼调节组件2生成预设负载。其中,场效管q1的另外两端分别接地和负载电阻r5,负载电阻r5决定着阻尼电机3输出的最大阻尼力。恒流源电路的采样adc接口通过电阻r1与单片机u6的p1.3/adc3/mosi引脚相连。
52.本实用新型还包括连接于摆动组件1与阻尼电机3之间的齿轮传动组件5,齿轮传动组件5包括主动轮和从动轮,从动轮与阻尼电机3的输出轴相连,主动轮与摆动组件1的摆动轴通过同步带相连,主动轮与从动轮的传动比恒定,使摆动组件1通过齿轮传动组件5克服阻尼电机3的阻尼力带动阻尼电机3转动。主动轮和从动轮均可以是直齿圆柱齿轮,齿轮传动组件5的齿轮数量可依据实际情况进行调整,在此不做具体限定。齿轮传动组件5的设置一方面可增大阻尼电机3阻尼力的调节范围,满足不同训练者的训练需求,使其适应性更好;另一方面,齿轮传动组件5还可以提升阻尼电机3的阻尼力调节精度,使训练者体验感更佳。
53.本实用新型还包括分别与控制组件4相连的角度传感器6和计时器,图4中的u4指代角度传感器6,角度传感器6用于检测阻尼电机3的旋转角度,计时器用于记录阻尼电机3的旋转时间。当角度传感器6与计时器同时反馈信号至控制组件4,控制组件4根据二者反馈的信号计算出摆动组件1的做功量,进而准确获取训练者消耗的热量值,方便训练者达到理想的训练效果。
54.请参考图4,图4为图1中角度传感器、控制组件及阻尼调节按钮的电路原理图。
55.角度传感器6的vdd供电引脚外接5v电压,其vss接地引脚直接接地。角度传感器6的csn/t0片选引脚与单片机u6的p1.2/adc2/ss/eci/cmpo引脚相连,角度传感器6的sck时钟引脚与单片机u6的p1.5/adc5/sclk引脚相连,角度传感器6的sdat/t2数据引脚与单片机u6的p1.4/adc4/miso引脚相连。
56.本实用新型还包括与阻尼电机3相连的蓄电组件7,摆动组件1带动阻尼电机3做功后,阻尼电机3将产生的电能存储至蓄电组件7,利用蓄电组件7为控制组件4、角度传感器6、计时器及显示屏9等供电,无需增设外部电源或电池,既有利于简化结构,又有利于节能环保。
57.具体地,请参考图3,图3为图1中阻尼电机与蓄电组件的电路原理图。蓄电组件7由电容c3、电容c4、电容c5、电容c6串联而成,电机接口j1的两个接口通过全桥整流电路与蓄电组件7相连,蓄电组件7与全桥整流电路之间设有用于防止蓄电组件7方向放电的二极管d2,二极管d2与全桥整流电路之间的电路通过电容c1接地。蓄电组件7与二极管d2相连的一端还连接有两条接地电路,两接地电路的一端通过保险丝f1串联在一起,另一端分别通过电容c2和限压元件d3接地。
58.本实用新型还包括与控制组件4相连的阻尼调节按钮8,当手动调节阻尼调节按钮8时,阻尼调节按钮8反馈增大信号或减小信号至控制组件4,控制组件4根据接收的增大信
号对应地增大阻尼调节组件2的电流以增大阻尼的电机阻尼力,或根据接收的减小信号对应地减小阻尼调节组件2的电流以减小阻尼电机3的阻尼力,从而实现自动调大或调小阻尼力,满足不同训练者的需求。
59.具体地,阻尼调节按钮8包括增大按钮s1和减小按钮s2,增大按钮s1与单片机u6的p1.1/adc1/ccp0引脚相连,减小按钮s2与单片机u6的p1.0/adc0/ccp1引脚相连。当然,阻尼调节按钮8也可以由滑动开关取代。
60.本实用新型还包括与控制组件4相连的显示屏9,利用显示屏9显示训练者的训练时间、训练者消耗的热量值、阻尼力、摆动组件1的摆动角度等信息。
61.请参考图5,图5为图1显示屏的电路原理图。显示屏9的型号具体为12864,显示屏9dis1的dis sclk引脚与单片机u6的p5.4/rst/mclko/cmp-引脚相连,显示屏9dis1的dis sda引脚与单片机u6的p5.5/cmp 引脚相连,显示屏9dis1的dis rs引脚与单片机u6的p3.1/txd/t2引脚相连,显示屏9dis1的dis rese引脚与单片机u6的p3.0/rxd/int4/t2clko引脚相连。
62.在此需要说明的是,控制组件4应包括信号接收部、信号判断部和信号发送部,信号接收部用于接收线角度传感器6等检测件发送的电信号,信号判断部和接收部电连接,以便信号判断部用于判断接收部所接收的信号是否是触发信号,信号发送部和信号判断部电连接,以便信号发送部将信号判断部的生成的判断信号发送至阻尼电机3等执行件。信号接收部、信号判断部和信号发送部三者的具体设置方式可参考现有技术;在本实用新型中,仅仅改变了上述三者的应用场景,并非对其进行了实质性改进。显然,具有该结构的控制组件4广泛应用于现有的自动控制设备上,例如mcu、dsp或者单片机等。本实用新型的关键点在于,控制组件4将各检测件及各执行件对应结合起来。
63.对所公开的实施例的上述说明,使本领域技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。