1.本发明涉及自动控制与机械领域,特别是指一种包含伺服传动链的机械机构谐振频率预测方法,可应用于各类包含伺服传动机构的机械装置和设备,用于预测机械机构谐振频率。
背景技术:
2.在自动控制领域,存在一个确定“伺服带宽”的问题,伺服带宽影响着自动控制的效果,伺服带宽越宽则控制效果越好。该带宽的确定与机械机构密切相关:当机械机构本身谐振频率较低时,伺服带宽存在“瓶颈”无法继续提高。因此,在机械机构设计时,需要准确地预测机械机构本身的谐振频率,为修改结构、机构设计并尽可能提高机械机构谐振频率提供数据基础。
3.目前通常采用的机械机构谐振频率预测方法如下几种:
4.1)将机械机构模型简化为多自由度弹簧-质量系统。此类方法忽略了轴承、连接部件、机构基础等环节,预测结果与实际测试结果有较大出入;
5.2)采用有限元进行模态分析。此方法往往忽略了机构传动部分刚度,同时模态分析工况的模型边界条件与实际伺服机构谐振频率测试时的边界条件存在偏差,造成结果不够准确;
6.3)采用多刚体动力学对伺服机构进行分析。这种方法忽略了机构中各结构件的刚度,预测结果不够准确。
技术实现要素:
7.本发明针对现有技术的不足,提供一种包含伺服传动链的机械机构谐振频率预测方法,该方法通过频率响应计算机械机构谐振频率,其建模相对容易,预测方法简单,结果可信,可满足伺服调试需求。
8.为了实现上述目的,本发明采用的技术方案是:
9.一种包含伺服传动的机械机构谐振频率预测方法,包括以下步骤:
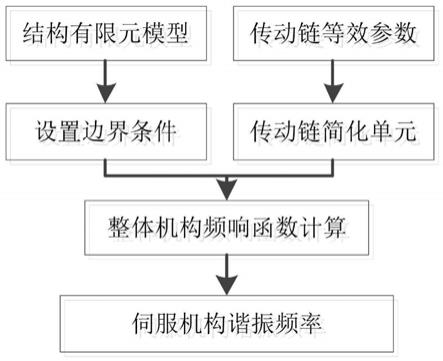
10.步骤1)建立机械机构结构件的有限元模型;
11.步骤2)结合机械原理对有限元模型所需的传动链部件参数进行简化计算;
12.步骤3)根据步骤2)的参数计算结果,在有限元模型中将各参数按照实际机械机构安装形式等效成弹簧、惯性、方程单元;
13.步骤4)在有限元模型中施加边界条件,并施加单位力矩,计算得到模型电动机转子频率响应曲线,由此得到机械机构的谐振频率。
14.进一步的,步骤2)中的传动链部件参数包括刚度、转动惯量、质量、减速比。
15.进一步的,步骤2)中,简化计算的具体方式为:
16.将电动机、轴承简化为惯性、刚度单元;将减速器、丝杠简化为惯性、自由度方程、弹簧单元;
17.在传动部件相应位置建立局部坐标系,按照各部件连接关系建立相应单元并施加约束;其中,传动部件按照运动方向释放相应自由度约束。
18.进一步的,步骤4)的具体方式为:
19.在有限元模型中按照实际测试情况修改边界条件,释放电动机节点位置绕轴旋转方向自由度,并施加单位力矩,计算得到模型电动机转子频率响应曲线;根据该响应曲线获取锁定转子谐振频率和自由转子谐振频率。
20.本发明所述方法整体流程如图1所示。与现有的技术相比,本发明的有益效果为:
21.1、本发明针对伺服机构特点,采用数值模型和理论方法合理简化相结合的方式建立机械机构的模型,再进行频率响应分析,最终得到机械机构的谐振频率。该方法建模相对容易,预测方法简单,结果可信,可满足伺服调试需求。
22.2、本发明可解决原有预测方法精度不足的问题,为伺服控制调试提供数据支撑、为修改伺服机构设计提供参考。
23.3、该方法可适用于多种类型的机械机构,对伺服调试和机械机构设计意义重大。
24.总之,本方法以有限元模型为基础,建模简单方便;本方法结合理论方法对传动机构进行简化,考虑了传动链刚度、减速比、转动惯量、质量等对谐振频率的影响,在预测计算时采用的边界条件与实际测试时边界条件相同,结果更为精确。
附图说明
25.图1为本发明实施例方法的流程图。
26.图2为典型机构频率响应曲线计算结果。
27.图3为某反射面天线的结构有限元模型。
28.图4为某反射面天线俯仰机构传动链示意图。
29.图5为某反射面天线俯仰机构传动链简化模型一。
30.图6为某反射面天线俯仰机构传动链简化模型二。
具体实施方式
31.为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图和具体实施方式对本发明作进一步详细的说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
32.如图1所示,一种包含伺服传动的机械机构谐振频率预测方法,包括以下步骤:
33.步骤1)建立机械机构结构件的有限元模型;
34.步骤2)结合机械原理对有限元模型所需的传动链部件参数进行简化计算;传动链部件参数包括刚度、转动惯量、质量、减速比,参数来源包括但不限于实验、仿真计算、理论计算等方式。简化计算的具体方式为:
35.将电动机、轴承简化为惯性、刚度单元;将减速器、丝杠简化为惯性、自由度方程、弹簧单元;
36.在传动部件相应位置建立局部坐标系,按照各部件连接关系建立相应单元并施加约束;其中,传动部件按照运动方向释放相应自由度约束。
37.步骤3)根据步骤2)的参数计算结果,在有限元模型中将各参数按照实际机械机构
安装形式等效成弹簧、惯性、方程单元;
38.步骤4)在有限元模型中施加边界条件,并施加单位力矩,计算得到模型电动机转子频率响应曲线,由此得到机械机构的谐振频率。具体方式为:
39.在有限元模型中按照实际测试情况修改边界条件,释放电动机节点位置绕轴旋转方向自由度,并施加单位力矩,计算得到模型电动机转子频率响应曲线;根据该响应曲线获取锁定转子谐振频率和自由转子谐振频率。
40.本方法首先建立机械机构结构件的有限元模型。其中,结构件主要为机械机构中不发生相对运动的部件以及机械结构基础等等,例如大型反射面天线中的反射面结构、塔基结构、各类支撑结构等等。
41.然后,结合机械原理对有限元模型所需的传动链部件重要参数进行简化计算。传动链部件主要包括电机、齿轮箱、丝杠、轴承等活动部件;传动链部件重要参数包括刚度、转动惯量、质量等。刚度参数可通过实验或有限元仿真计算得出,转动惯量、质量参数可以通过几何模型与理论计算得出。
42.之后,在有限元模型中将各参数按照实际机械机构安装形式等效成弹簧、惯性、方程等单元;其中,电动机、轴承简化为惯性、刚度单元;减速器、丝杠简化为惯性、自由度方程、弹簧单元。在传动部件相应位置建立局部坐标系,按照各部件连接关系建立相应单元并施加约束;其中,传动部件按照运动方向释放相应自由度约束;若传动部件较少,电动机输出轴与减速机刚度可视情况进行合成,等效为一个刚度单元,等效刚度计算方法见公式,其中ke为等效后的刚度,k1和k2分别为电动机轴折算到减速机输出轴的刚度和减速机刚度,电动机输出轴刚度折算方法见公式,其中k2为折算后的电动机轴刚度,i为减速器减速比,k1为折算前电动机轴刚度,同时电机转动惯量也进行等效折算,折算公式见式,其中je为折算后的电机转动惯量,i为减速器减速比,j1为折算前电机转动惯量;若传动部件较多,则齿轮箱、减速器、丝杠等变速部件应按照实际减速比建立方程约束;各传动部件的键、联轴器等影响整体刚度的部分应充分考虑,与对应的轴刚度进行合成,等效刚度计算方法见公式,其中ke为等效后的刚度,k1和k2分别为轴刚度和联轴器刚度。公式如下:
[0043][0044]
k2=i2k1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0045]
je=i2j1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0046]
最终,在有限元模型中按照实际测试情况修改边界条件,释放电机节点位置绕轴旋转方向自由度,并施加单位力矩,计算得到模型电动机转子频率响应曲线,由此得到机械机构的谐振频率。
[0047]
典型机构频率响应计算结果如图2所示。图中1为锁定转子的谐振频率,2为自由转子谐振频率。
[0048]
以下为更具体的例子:
[0049]
实施例1:以某反射面天线机构为例,介绍具体实施步骤。
[0050]
步骤一:建立结构有限元模型。如图3所示。天线结构包括:反射体3;俯仰支臂4;俯仰箱体5;支撑底座6。其中反射体与俯仰支臂通过螺栓连接,无相互运动;俯仰支臂与俯仰
箱体通过传动机构相连,该传动机构负责天线俯仰方向运动,也被称俯仰传动链;俯仰箱体与底座通过传动机构相连,该传动机构负责天线方位方向运动,也被称为方位传动链;底座与大地通过螺栓相连,无相互运动。
[0051]
步骤二:计算传动链关键参数。以俯仰机构传动链为例,该传动链构造如图4所示。其中:7为俯仰电机,俯仰电机外壳与俯仰箱相连;8为减速器,减速器输入轴与俯仰电机轴相连,输出轴连接一个较小的齿轮;9为末级减速机构,该减速机构由减速器输出轴的小齿轮和固定在俯仰支臂上的大齿轮构成;10为俯仰支臂。在本例中,电动机转子转动惯量由设计厂家提供,数值为107
×
10-4
kg
·
m2,减速器减速比为50,包含联轴器的输出轴刚度250n
·
m/arcmin由实验测出,输入轴转动惯量33
×
10-4
kg
·
m2由设计厂家提供;末级减速机构减速比为160/18。
[0052]
步骤三:在有限元模型中建立传动链简化模型。以俯仰机构传动链为例,在有限元模型中建立如图5所示的传动链简化模型,其中:11点代表电动机壳体,该点与俯仰箱通过多点约束连接;12点为电动机转子,在该点建立局部坐标系,其中x轴指向传动链传动方向,释放11点到12点的绕x轴转动自由度并约束其他方向自由度,并施加绕x轴方向的电动机转动惯量与减速器输入轴转动惯量,即步骤二中提供的107
×
10-4
33
×
10-4
kg
·
m2;13点表示减速器输出轴,释放12点到13点之间的绕x轴的转动自由度并约束其他方向自由度,在12点到13点之间施加绕x轴转动的方程约束,转动角度比为减速器的减速比,即步骤二中提供的50;14点表示减速器输出轴连接的小齿轮,释放13点到14点之间的绕x轴的转动自由度并约束其他方向自由度,在13点到14点之间施加绕x轴的弹簧单元,该单元刚度为减速器输出轴刚度,即步骤二中提供的250n
·
m/arcmin;15点表示末级减速大齿轮,释放14点到15点之间的绕x轴的转动自由度并约束其他方向自由度,增加x转动方向的方程约束,转动角度比为末级减速比,即步骤二中提供的160/18,15点通过多点约束与俯仰支臂模型连接。
[0053]
步骤四:载荷施加与计算。在图5的电动机转子位置,即12点施加绕x轴转动的单位力矩,进行稳态频率响应函数分析。12点的角位置频率响应函数如图1所示,其中1点为俯仰方向锁定转子谐振频率,从图中可以看出该谐振频率为2.0902hz。
[0054]
实施例2:以与实施例1相同的反射面天线为例,介绍第二种实施方法。
[0055]
该实施例步骤一至步骤二与实施例1相同。
[0056]
步骤三:在有限元模型中建立传动链简化模型。以俯仰机构传动链为例,在有限元模型中建立如图6所示的传动链简化模型,其中16点表示电动机转子,17点表示末级减速大齿轮。在16点建立局部坐标系,x轴方向指向17点,释放16点到17点的绕x轴转动自由度并约束其他方向自由度。16点通过多点约束与俯仰箱相连,该多点约束不应包含绕x轴的转动自由度,17点通过多点约束与俯仰支臂相连。16点到17点建立绕x轴旋转的弹簧单元,该单元刚度计算过程如式。17点施加绕x轴的转动惯量,该转动惯量计算过程如式。16点施加绕x轴的转动惯量,该转动惯量计算过程如下式:
[0057][0058]
[0059][0060]
步骤四:载荷施加与计算。在图6的电动机转子位置,即16点施加绕x轴转动的单位力矩,进行稳态频率响应函数分析。16点的角位置频率响应函数如图1所示,其中1点为俯仰方向锁定转子谐振频率,从图中可以看出该谐振频率为2.0902hz。
[0061]
总之,本发明以有限元模型为基础,并结合理论方法对传动机构进行简化,考虑了传动链刚度、减速比、转动惯量、质量等对谐振频率的影响,在预测计算时采用的边界条件与实际测试时边界条件相同,建模简单方便,且结果更为精确。
[0062]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。