1.本发明属于空间光通信技术领域,具体是一种声光复合定位的无扫描空间激光通信装置及捕获方法。
背景技术:
2.空间光通信(space optical communications)也称无线光通信,空间激光通信设备通过捕获、跟踪、对准(acquisition、tacking and pointing,简称atp)技术来保证通信。现有atp相关技术中的捕获阶段普遍采用扫描捕获,通常由于探测视场太窄,很难捕获到信标,即使采用大发散角发射、大视场角接收,也需要复杂的扫描算法对信标光进行扫描捕获,而且在复杂环境下往往需要很长时间。
技术实现要素:
3.本发明的目的是针对现有技术的不足,而提供一种声光复合定位的无扫描空间激光通信装置及捕获方法。这种装置在近场大气环境甚至水下通信中具有快速捕获的功能、适用范围广,这种方法具有更加快速、稳定和自动化程度高的优点,适用更复杂的环境,可快速捕获信标光从而建立空间激光通信链路,保证高速传输数据的通畅。
4.实现本发明目的的技术方案是:
5.一种声光复合定位的无扫描空间激光通信装置,包括设置在不同位置处的可移动天线终端a和固定天线终端b,其中:
6.可移动天线终端a设有两轴转台,两轴转台的底座的中心部区域设有呈圆柱状的支柱,支柱朝上的一端可转动连接可移动天线终端a的可二维转动的转动架,转动架内设有转动承载壳体,转动承载壳体内设有依次连接的信号光源、第一分光镜、准直镜、合束镜、信号光发射镜和顺序连接的信号光接收镜、第二分光镜、第一感光靶面、第一处理器,支柱的外部设有固定承载壳体,固定承载壳体内设有顺序连接的第二处理器、第二感光靶面、全景镜头及第一信标、第二信标、第三信标,第一信标、第二信标、第三信标均匀设置在支柱的外壁上,另外在承载壳体同一水平位置的外壁上按60
°
一个均匀分布设有6个声波发射器,6个声波发射器保证360
°
范围内发送声波;
7.固定天线终端b的结构除了没有6个声波发射器外,其余均与可移动天线终端a的结构完全一致,固定天线终端b与定位系统采用现有技术中的通讯方式连接。
8.所述全景镜头依据折反射全景成像原理采用折反射全景成像系统,折反射全景成像系统设有摄像头和反射抛物镜面,摄像头对准反射抛物镜面形成360
°
折反成像系统,成像系统对摄像头侧边水平360
°
和垂直120
°
视场范围成像,全景镜头具有水平360
°
垂直120
°
视场,易于接收到信标,也可以采用鱼眼镜头、全景环带光学系统或其它全景系统;
9.一种声光复合定位的无扫描空间激光通信捕获方法,包括上述的声光复合定位的无扫描空间激光通信捕装置,所述方法为:天线终端a(b)的第一信标、第二信标和第三信标信标光源具有120
°
发散角,天线终端a(b)的全景镜头具有水平360
°
垂直120
°
视场,采用折
反射全景成像系统,形成360
°
折反成像,天线终端a(b)发射的信标光被天线终端b(a)的全景镜头捕获后,天线终端a(b)通过第二感光靶面成像,交给第二处理器解算出角度,与此同时,天线终端a的6个声波发射器和第一信标、第二信标和第三信标同时工作,6个声波发射器发射的声波被三个定位基点检测到,三个定位基点将三个定位基点到天线终端a的距离数据交给天线终端b端的第二处理器,第二处理器依据三边测距原理计算出终端a的位置坐标,天线终端b的第二处理器通过将声波定位坐标与信标定位得到的角度进行融合,确定对准方向无误,再根据信标光斑坐标角度控制两轴转台指向天线终端a的区域,天线终端a跟随天线终端b捕获到对端信标光,同时会接收到b端的信号光,此时两端信号光接收镜头可以接收到对端发射的信号光,同时天线终端b(a)的第二处理器将两轴转台的控制权交给天线终端b(a)的第一处理器,天线终端b(a)的信号光源产生信号光通过第一分光镜和准直镜后形成两束光,其中一束作为通信数据发散角不变,另一束增大发散角用作跟踪对准,天线终端a(b)接收的信号光通过第二分光镜将一部分光用于通信,另一部分经第一感光靶面后给第一处理器用于目标精确跟踪对准,其中,所述三边测距原理为,假设在三维平面xyz中,声波定位系统分别放置在同一高度的不同位置,c1(x1,y1,z1)、c2(x2,y2,z2)、c3(x3,y3,z3)是声波接收点也叫定位基点,r1、r2、r3分别是定位基点在地面的投影点与天线终端a(可移动天线端m)之间的距离,以r1、r2、r3为半径作三个圆得出交点,可移动天线端m即天线终端a的位置坐标(x,y),
[0010][0011]
设测量得到的空中定位基点与可移动天线端m即天线终端a之间的距离为l1、l2、l3,l1、l2、l3依据l=(331.45 0.607t)t计算得到,其中,t为温度,t为时间,设已知空中定位基点的高度相同,都为h,也就是z1=z2=z3,那么由得:
[0012][0013][0014]
本技术方案的优点是:
[0015]
1)采用全景成像pi(panoramic imaging,简称pi),可在垂直和水平的大视场内进行凝视,不需要转动扫描,大大提高了捕获效率;
[0016]
2)融合声音定位系统辅助信标定位,相对于传统的仅靠信标光扫描的捕获方式来说,可以去除掉背景杂光和环境反射光导致的误跟,提高了捕获的准确性。
[0017]
这种装置在近场大气环境甚至水下通信中具有快速捕获的功能、适用范围广,这种方法采用全景凝视成像和声波定位相结合的方式进行捕获,全景凝视成像接收信标的方式不需要进行扫描,声音定位能避免杂光和反射光的干扰,使得光学天线能够更加高效地捕获目标,提升通信质量,增加了系统的鲁棒性,具有更加快速、稳定和自动化程度高的优点,适用更复杂的环境,可快速捕获信标光从而建立空间激光通信链路,保证高速传输数据的通畅。
附图说明
[0018]
图1为实施例中天线a端原理示意图;
[0019]
图2为实施例中天线b端原理示意图;
[0020]
图3实施例中的声波定位原理示意图;
[0021]
图4实施例中的三边测距示意图;
[0022]
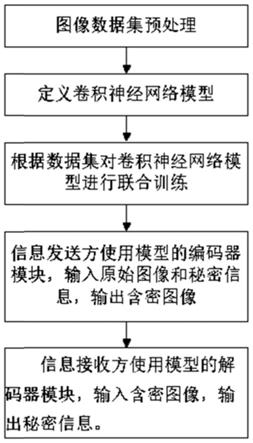
图5实施例中方法流程示意图;
[0023]
图6实施例中全景环带光学成像系统原理图;
[0024]
图7实施例中全景镜头的全景图像示意图。
[0025]
图中,1.转动承载壳体 2.信号光源 3.第一分光镜 4.准直镜 5.合束镜 6.信号光发射镜 7.转动架 8.第一处理器 9.第一感光靶面 10.第二分光镜 11.信号光接收镜 12.承载壳体 13.第二处理器 14.第二感光靶面 15.全景镜头 16.第一信标 17.第二信标 18.第三信标 19.底座 20.全景系统的视场范围 21.视场盲区 22.光斑在视场中的成像位置。
具体实施方式
[0026]
下面结合附图和实施例对本发明的内容做进一步的阐述,但不是对本发明的限定。
[0027]
实施例:
[0028]
一种声光复合定位的无扫描空间激光通信装置,包括设置在不同位置处的可移动天线终端a和固定天线终端b,其中:
[0029]
如图1所示,可移动天线终端a设有两轴转台,两轴转台的底座19的中心部区域设有呈圆柱状的支柱,支柱朝上的一端可转动连接可移动天线终端a的可二维转动的转动架7,转动架7内设有转动承载壳体1,转动承载壳体1内设有依次连接的信号光源2、第一分光镜3、准直镜4、合束镜5、信号光发射镜6和顺序连接的信号光接收镜11、第二分光镜10、第一感光靶面9、第一处理器8,支柱的外部设有固定承载壳体12,固定承载壳体12内设有顺序连接的第二处理器13、第二感光靶面14、全景镜头15及第一信标16、第二信标17、第三信标18,第一信标16、第二信标17、第三信标18均匀设置在支柱的外壁上,另外在承载壳体12同一水平位置的外壁上按60
°
一个均匀分布设有6个声波发射器,6个声波发射器保证360
°
范围内发送声波;
[0030]
如图2所示,固定天线终端b的结构除了没有6个声波发射器外,其余均与可移动天线终端a的结构完全一致,固定天线终端b与定位系统采用现有技术中的通讯方式连接。
[0031]
所述全景镜头15依据折反射全景成像原理采用折反射全景成像系统,折反射全景成像系统设有摄像头和反射抛物镜面,摄像头对准反射抛物镜面形成360
°
折反成像系统,成像系统对摄像头侧边水平360
°
和垂直120
°
视场范围成像,全景镜头具有水平360
°
垂直120
°
视场,易于接收到信标,如图6所示。
[0032]
一种声光复合定位的无扫描空间激光通信捕获方法,包括上述的声光复合定位的无扫描空间激光通信捕装置,所述方法为:如图5所示,天线终端a(b)的第一信标16、第二信标17和第三信标18信标光源具有120
°
发散角,天线终端a(b)的全景镜头15具有水平360
°
垂直120
°
视场,采用折反射全景成像系统,如图3所示,形成360
°
折反成像,天线终端a(b)发射
的信标光被天线终端b(a)的全景镜头15捕获后,天线终端a(b)通过第二感光靶面14成像,交给第二处理器13解算出角度,与此同时,天线终端a的6个声波发射器和第一信标16、第二信标17和第三信标18同时工作,6个声波发射器发射的声波被三个定位基点检测到,三个定位基点将三个定位基点到天线终端a的距离数据交给天线终端b端的第二处理器13,第二处理器13依据三边测距原理计算出终端a的位置坐标,天线终端b的第二处理器13通过将声波定位坐标与信标定位得到的角度进行融合,确定对准方向无误,再根据信标光斑坐标角度控制两轴转台指向天线终端a的区域,天线终端a跟随天线终端b捕获到对端信标光,同时会接收到b端的信号光,此时两端信号光接收镜头可以接收到对端发射的信号光,同时天线终端b(a)的第二处理器13将两轴转台的控制权交给天线终端b(a)的第一处理器8,天线终端b(a)的信号光源2产生信号光通过第一分光镜3和准直镜4后形成两束光,其中一束作为通信数据发散角不变,另一束增大发散角用作跟踪对准,天线终端a(b)接收的信号光通过第二分光镜10将一部分光用于通信,另一部分经第一感光靶面9后给第一处理器8用于目标精确跟踪对准,其中,参照图3、图4所,所述三边测距原理为,假设在三维平面xyz中,声波定位系统分别放置在同一高度的不同位置,c1(x1,y1,z1)、c2(x2,y2,z2)、c3(x3,y3,z3)是声波接收点也叫定位基点,r1、r2、r3分别是定位基点在地面的投影点与可移动天线端m之间的距离,以r1、r2、r3为半径作三个圆得出交点,即天线终端a(可移动天线端m)的位置坐标(x,y),
[0033][0034]
设测量得到的空中定位基点与天线终端a(可移动天线端m)之间的距离为l1、l2、l3,l1、l2、l3依据l=(331.45 0.607t)t计算得到,其中,t为温度,t为时间,设已知空中定位基点的高度相同,都为h,也就是z1=z2=z3,那么由得:
[0035][0036][0037]
参照图6和图7对信标定位算法进行说明,全景环带光学成像系统产生如图7所示的环状图像,图7中20是此全景环带系统的视场范围,21为成像视场盲区,也可以采用改进设计扩大视场区域,消除盲区,22为光斑在视场中的成像位置,假设摄像头的图像分辨率为宽为640,高为512,光斑在图像上成像的质心坐标采用现有技术计算出为(480,384),则通过光斑质心在反射面镜头上的角度为180
°
arctan[(480-320)/(384-256)],依据上述结果计算出相对于信标光的位置偏差,再根据声波定位获得的坐标位置(x,y),计算出天线终端a相对于天线终端b的角度信息,融合声光获得的两个角度信息,判断方位后,以信标光位置偏差为准,将信标光的位置偏差传输至电机驱动,控制两轴转台的水平和俯仰电机实现初始对准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。