技术特征:
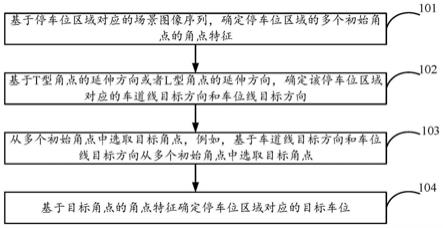
1.一种车位检测方法,其特征在于,所述方法包括:基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征,所述角点特征包括位置、形状和延伸方向,所述形状为t型或l型;基于t型角点的延伸方向或者l型角点的延伸方向,确定所述停车位区域对应的车道线目标方向和车位线目标方向,并从所述多个初始角点中选取目标角点;其中,针对每个初始角点,若该初始角点对应的延伸方向与所述车道线目标方向匹配,且该初始角点对应的延伸方向与所述车位线目标方向匹配,则将该初始角点选取为目标角点;基于所述目标角点的角点特征确定所述停车位区域对应的目标车位。2.根据权利要求1所述的方法,其特征在于,所述基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征,包括:若所述场景图像序列包括m帧场景图像,针对每帧场景图像,将该场景图像输入给角点检测模型,得到预测角点的角点特征及该角点特征对应的置信度;基于m帧场景图像对应的预测角点的角点特征确定停车位区域的多个初始角点的角点特征;其中,针对每个预测角点,若该预测角点与至少n帧场景图像对应,n小于或者等于m,则将该预测角点确定为初始角点,并将该预测角点对应的最大置信度的角点特征确定为该初始角点的角点特征。3.根据权利要求1所述的方法,其特征在于,所述基于t型角点的延伸方向或者l型角点的延伸方向,确定所述停车位区域对应的车道线目标方向和车位线目标方向,包括:若t型初始角点数量大于或者等于1,且所述t型初始角点数量大于或者等于l型初始角点数量的一半,则基于t型角点的延伸方向确定所述停车位区域对应的车道线目标方向和车位线目标方向;或,若t型初始角点数量小于1或t型初始角点数量小于l型初始角点数量的一半,且l型初始角点数量大于或等于2,则基于l型角点的延伸方向确定所述停车位区域对应的车道线目标方向和车位线目标方向。4.根据权利要求1所述的方法,其特征在于,所述基于所述目标角点的角点特征确定所述停车位区域对应的目标车位,包括:基于所述目标角点的角点特征确定所述停车位区域对应的k个初始车位,所述k为正整数;针对每个初始车位,则:若确定该初始车位是正常车位,则将该初始车位确定为目标车位;若确定该初始车位是误检车位,则删除该初始车位;若基于该初始车位确定所述停车位区域存在漏检车位,则基于该初始车位生成至少两个目标车位;基于k个初始车位对应的所有目标车位确定停车位区域对应的目标车位。5.根据权利要求4所述的方法,其特征在于,所述方法还包括:若该初始车位包括相邻两个l型角点,且基于所述两个l型角点的延伸方向确定所述两个l型角点的车道线方向是背向,则确定该初始车位是误检车位;若该初始车位的车道线长度小于相邻车位的车道线长度与第一系数值的乘积,则确定该初始车位是误检车位,所述第一系数值大于0且小于1;若该初始车位的车道线长度大于相邻车位的车道线长度与第二系数值的乘积,则确定
所述停车位区域存在漏检车位,所述第二系数值大于1;若k为1,且该初始车位的车道线长度大于场景图像高度与第三系数值的乘积,则确定所述停车位区域存在漏检车位,所述第三系数值大于或等于0.5;若k为1,且该初始车位的车道线长度小于场景图像高度与第四系数值的乘积,且场景图像中该初始车位的上侧或下侧高度大于该初始车位的车道线长度,则确定所述停车位区域存在漏检车位,所述第四系数值小于或等于0.5。6.根据权利要求4所述的方法,其特征在于,所述方法还包括:针对每个目标车位,采用如下方式确定该目标车位对应的车位线长度:若该目标车位已存在车辆,且获知所述车辆的宽度,则基于所述车辆的宽度和已配置的第一比例关系,确定该目标车位对应的车位线长度;其中,所述第一比例关系表示车辆宽度与车位线长度之间的比例关系;若该目标车位未存在车辆,或该目标车位已存在车辆,但未获知车辆宽度,则基于该目标车位的车道线长度和已配置的第二比例关系,确定该目标车位对应的车位线长度,第二比例关系表示车道线长度与车位线长度之间的比例关系。7.根据权利要求1所述的方法,其特征在于,所述基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征,包括:在接收到针对所述停车位区域的车位检测命令时,基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征;或者,在检测到所述停车位区域有车辆进入时,基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征;或者,在检测到所述停车位区域有车辆离开时,基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征。8.一种车位检测装置,其特征在于,所述装置包括:确定模块,用于基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征,所述角点特征包括位置、形状和延伸方向,所述形状为t型或l型;基于t型角点的延伸方向或者l型角点的延伸方向,确定所述停车位区域对应的车道线目标方向和车位线目标方向;选取模块,用于从所述多个初始角点中选取目标角点;其中,针对每个初始角点,若该初始角点对应的延伸方向与所述车道线目标方向匹配,且该初始角点对应的延伸方向与所述车位线目标方向匹配,则将该初始角点选取为目标角点;所述确定模块,还用于基于所述目标角点的角点特征确定所述停车位区域对应的目标车位。9.根据权利要求8所述的装置,其特征在于,其中,所述确定模块基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征时具体用于:若所述场景图像序列包括m帧场景图像,针对每帧场景图像,将该场景图像输入给角点检测模型,得到预测角点的角点特征及该角点特征对应的置信度;基于m帧场景图像对应的预测角点的角点特征确定停车位区域的多个初始角点的角点特征;其中,针对每个预测角点,若该预测角点与至少n帧场景图像对应,n小于或者等于m,则将该预测角点确定为初始角点,并将该预测角点对应的最大置信度的角点特征确定为该初始角点的角点特征;
其中,所述确定模块基于t型角点的延伸方向或l型角点的延伸方向,确定停车位区域对应的车道线目标方向和车位线目标方向时具体用于:若t型初始角点数量大于或等于1,且所述t型初始角点数量大于或等于l型初始角点数量的一半,基于t型角点的延伸方向确定所述停车位区域对应的车道线目标方向和车位线目标方向;或,若t型初始角点数量小于1或t型初始角点数量小于l型初始角点数量的一半,且l型初始角点数量大于或等于2,基于l型角点的延伸方向确定所述停车位区域对应的车道线目标方向和车位线目标方向;其中,所述确定模块基于所述目标角点的角点特征确定所述停车位区域对应的目标车位时具体用于:基于所述目标角点的角点特征确定所述停车位区域对应的k个初始车位,所述k为正整数;针对每个初始车位,则:若确定该初始车位是正常车位,则将该初始车位确定为目标车位;若确定该初始车位是误检车位,则删除该初始车位;若基于该初始车位确定所述停车位区域存在漏检车位,则基于该初始车位生成至少两个目标车位;基于所述k个初始车位对应的所有目标车位确定所述停车位区域对应的目标车位;其中,所述确定模块还用于:若该初始车位包括相邻两个l型角点,且基于所述两个l型角点的延伸方向确定所述两个l型角点的车道线方向是背向,则确定该初始车位是误检车位;若该初始车位的车道线长度小于相邻车位的车道线长度与第一系数值的乘积,则确定该初始车位是误检车位,所述第一系数值大于0且小于1;若该初始车位的车道线长度大于相邻车位的车道线长度与第二系数值的乘积,则确定所述停车位区域存在漏检车位,所述第二系数值大于1;若k为1,且该初始车位的车道线长度大于场景图像高度与第三系数值的乘积,则确定所述停车位区域存在漏检车位,所述第三系数值大于或等于0.5;若k为1,且该初始车位的车道线长度小于场景图像高度与第四系数值的乘积,且场景图像中该初始车位的上侧或下侧高度大于该初始车位的车道线长度,则确定所述停车位区域存在漏检车位,所述第四系数值小于或等于0.5;其中,所述确定模块还用于:针对每个目标车位,采用如下方式确定该目标车位对应的车位线长度:若该目标车位已存在车辆,且获知所述车辆的宽度,则基于所述车辆的宽度和已配置的第一比例关系,确定该目标车位对应的车位线长度;其中,所述第一比例关系表示车辆宽度与车位线长度之间的比例关系;若该目标车位未存在车辆,或该目标车位已存在车辆,但未获知车辆宽度,则基于该目标车位的车道线长度和已配置的第二比例关系,确定该目标车位对应的车位线长度,第二比例关系表示车道线长度与车位线长度之间的比例关系;其中,所述确定模块基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征时具体用于:在接收到针对所述停车位区域的车位检测命令时,基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征;或者,在检测到所述停车位区域有车辆进入时,基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征;或者,在检测到所述停车位区域有车辆离开时,基于停车位区域对应的场景图像序列,确定停车位区域的多个初始角点的角点特征。10.一种车位检测设备,其特征在于,包括:处理器和机器可读存储介质,所述机器可读存储介质存储有能够被所述处理器执行的机器可执行指令;所述处理器用于执行机器可执行指令,以实现权利要求1-7任一所述的方法步骤。
技术总结
本申请提供一种车位检测方法、装置及设备,该方法包括:基于场景图像序列确定多个初始角点的角点特征,角点特征包括位置、形状和延伸方向,所述形状为T型或L型;基于T型角点的延伸方向或L型角点的延伸方向确定车道线目标方向和车位线目标方向,从多个初始角点中选取目标角点;针对每个初始角点,若初始角点对应的延伸方向与车道线目标方向匹配,且初始角点对应的延伸方向与车位线目标方向匹配,则将初始角点选取为目标角点;基于目标角点的角点特征确定所述停车位区域对应的目标车位。通过本申请的技术方案,可以实现车位自动检测,在路侧停车场景下,即使严重遮挡车位,也能够实现车位自动检测。车位自动检测。车位自动检测。
技术研发人员:薛宜明
受保护的技术使用者:上海高德威智能交通系统有限公司
技术研发日:2021.12.20
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。