技术特征:
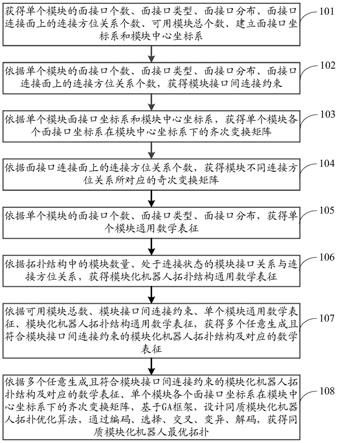
1.一种同质模块化机器人拓扑优化算法,其特征在于,所述方法包括:获得单个模块的面接口个数、面接口类型、面接口分布、面接口连接面上的连接方位关系个数、可用模块总个数、建立面接口坐标系和模块中心坐标系;依据单个模块的面接口个数、面接口类型、面接口分布、面接口连接面上的连接方位关系个数,获得模块接口间连接约束;依据单个模块面接口坐标系和模块中心坐标系,获得单个模块各个面接口坐标系在模块中心坐标系下的齐次变换矩阵;依据面接口连接面上的连接方位关系个数,获得模块不同连接方位关系所对应的奇次变换矩阵;依据单个模块的面接口个数、面接口类型、面接口分布,获得单个模块通用数学表征;依据拓扑结构中的模块数量、处于连接状态的模块接口关系与连接方位关系,获得模块化机器人拓扑结构通用数学表征;依据可用模块总数、模块接口间连接约束、单个模块通用数学表征、模块化机器人拓扑结构通用数学表征,获得多个任意生成且符合模块接口间连接约束的模块化机器人拓扑结构及对应的数学表征;依据多个任意生成且符合模块接口间连接约束的模块化机器人拓扑结构及对应的数学表征、单个模块各个面接口坐标系在模块中心坐标系下的齐次变换矩阵,设计同质模块化机器人拓扑优化算法,基于ga框架,通过编码、选择、交叉、变异、解码,获得同质模块化机器人最优拓扑,其中,所述同质模块化机器人指组成机器人的各个模块结构、功能完全相同。2.根据权利要求1所述的方法,其特征在于,依据单个模块的面接口个数、面接口类型、面接口分布,获得单个模块通用数学表征为:其中,n
surf_con
表示单个模块的面接口个数;a
i
(i=1,2,...,n
surf_con
)表示接口i所属半球类型,a
i
=0表示接口i所属半球类型为被动半球,不可主动输出扭矩,a
i
=1表示接口i所属半球类型为主动半球,可主动输出扭矩;b
i
(i=1,2,...,n
surf_con
)表示接口i的类型,b
i
=0表示接口i为母接口,不可主动输出扭矩,b
i
=1表示接口i为公接口,可主动输出扭矩;d
i
(i=1,2,...,n
surf_con
)表示接口i的所处状态,d
i
=0表示接口i的所处状态为空闲,d
i
=1表示接口i的所处状态为连接;e
i
(i=1,2,...,n
surf_con
)表示与接口i处于连接状态的模块编号;f
i
(i=1,2,...,n
surf_con
)表示与接口i处于连接状态的模块接口编号;g
i
(i=1,2,...,n
surf_con
)表示接口i所处的连接方位关系。3.根据权利要求1所述的方法,其特征在于,依据拓扑结构中的模块数量、处于连接状态的模块接口编号与连接方位关系,获得模块化机器人拓扑结构通用数学表征为:
其中,n
topo_module
表示模块化机器人拓扑结构中所包含的模块数量;m
i
(i=1,2,...,n
topo_module
)表示模块化机器人拓扑结构中的各个模块编号;矩阵b称为接地关系矩阵,ba
i
(i=1,2,...,n
topo_module
)表示模块化机器人拓扑结构中模块是否在使用时接地作为基座,ba
i
=0表示模块m
i
在使用时不接地,ba
i
=1表示模块m
i
在使用时接地作为基座,且矩阵c称为模块化机器人的连接关系矩阵,c
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)∈{1,...,n
surf_con
}表示模块m
i
与模块m
j
相连接的接口编号,当i=j时,c
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
),n
surf_con
表示单个模块的面接口个数;矩阵co称为模块化机器人的连接方位关系矩阵,co
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)表示模块m
i
与模块m
j
的连接方位关系,当i=j时,co
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)。4.根据权利要求1所述的方法,其特征在于,依据任意生成且符合模块接口间连接约束的模块化机器人拓扑结构及对应的数学表征、单个模块各个面接口坐标系在模块中心坐标系下的齐次变换矩阵,基于ga框架,通过编码、选择、交叉、变异、解码,获得同质模块化机器人最优拓扑,包括:依据模块化机器人拓扑结构通用数学表征,获取模块化机器人拓扑结构通用数学表征所具有的特殊属性;依据模块化机器人拓扑结构通用数学表征所具有的特殊属性,获取针对模块化机器人拓扑结构的编码机制。5.根据权利要求4所述的方法,其特征在于,依据模块化机器人拓扑结构通用数学表征,获取模块化机器人拓扑结构通用数学表征所具有的特殊属性,包括:对包含n
topo_module
个模块的模块化机器人拓扑结构,其数学表征为个模块的模块化机器人拓扑结构,其数学表征为
其中,n
topo_module
表示模块化机器人拓扑结构中所包含的模块数量;m
i
(i=1,2,...,n
topo_module
)表示模块化机器人拓扑结构中的各个模块编号;矩阵b称为接地关系矩阵,ba
i
(i=1,2,...,n
topo_module
)表示模块化机器人拓扑结构中模块是否在使用时接地作为基座,ba
i
=0表示模块m
i
在使用时不接地,ba
i
=1表示模块m
i
在使用时接地作为基座,且矩阵c称为模块化机器人的连接关系矩阵,c
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)∈{1,...,n
surf_con
}表示模块m
i
与模块m
j
相连接的接口编号,当i=j时,c
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
),n
surf_con
表示单个模块的面接口个数;矩阵co称为模块化机器人的连接方位关系矩阵,co
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)表示模块m
i
与模块m
j
的连接方位关系,当i=j时,co
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
);因为c
ij
(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
)表示模块m
i
与模块m
j
相连接的接口编号,当i=j时,c
ij
=0(i=1,2,...,n
topo_module
;j=1,2,...,n
topo_module
),所以可知模块化机器人的连接关系矩阵c具有如下特殊属性:矩阵c的上下三角元素性能对称,矩阵中对称位置满足模块接口间连接约束;矩阵中每一行的非0个数表示与行数相对应的模块编号处于连接状态的接口个数;同理,连接方位关系矩阵co具有相同属性。6.根据权利要求4所述的方法,其特征在于,依据模块化机器人拓扑结构通用数学表征所具有的特殊属性,获取针对模块化机器人拓扑结构的编码机制,包括:依据模块化机器人拓扑结构通用数学表征中的连接关系矩阵c、连接方位关系矩阵co和接地关系矩阵ba,结合模块化机器人拓扑结构通用数学表征所具有的特殊属性,获得模块化机器人拓扑结构的编码机制,则模块化机器人拓扑结构的基因型表示为矩阵c-co:其中,n
surf_con
表示单个模块的面接口个数;branch_con_n
i
(i=1,...,n
surf_con
)表示基座模块接口i上所连接的总模块个数;表示接地模
块的接口i上的第j组连接状态,由连接关系矩阵c、连接方位关系矩阵co中的对应元素的二进制组成,共包含(n
bin_surf_con_num
n
bin_surf_con_num
n
bin_con_ori_num
)位二进制,n
bin_surf_con_num
表示单个模块的面接口个数所对应的最大二进制位数,n
bin_con_ori_num
表示面接口连接面上的连接方位关系个数所对应的最大二进制位数;矩阵c-co中每个元素作为个体基因,每个基因分别表示连接关系间的模块接口编号与模块方位关系编号。7.根据权利要求1所述的方法,其特征在于,依据多个任意生成且符合模块接口间连接约束的模块化机器人拓扑结构及对应的数学表征、单个模块各个面接口坐标系在模块中心坐标系下的齐次变换矩阵,基于ga框架,通过编码、选择、交叉、变异、解码,获得同质模块化机器人最优拓扑,包括:使用机器人的工作空间最大作为目标函数,依据模块化机器人拓扑结构的编码机制,对模块化机器人拓扑结构的基因型进行解码,获得模块化机器人拓扑结构的矩阵m、ba、c、co;依据模块化机器人拓扑结构的矩阵c、co,基于深度搜索,单个模块各个面接口坐标系在模块中心坐标系下的齐次变换矩阵、模块不同连接方位关系所对应的奇次变换矩阵,获得模块化机器人拓扑结构所对应的运动学模型;基于蒙特卡洛,获得模块化机器人的工作空间;遍历多个模块化机器人拓扑结构,获得各自对应的模块化机器人工作空间为f(topo_i)(i=1,...,n
topo_total
),其中n
topo_total
表示模块化机器人拓扑结构总个数;计算多个模块化机器人拓扑结构的个体适应度p(topo_i)(i=1,...,n
topo_total
),通过求取多个模块化机器人拓扑结构该个体前面的所有个体适应度之和,计算个体的累计适应度其中,topo_i表示个体列表中的第i个个体,p(topo_k)表示个体列表中第i个个体的适应度函数值,q(topo_i)表示个体列表中第i个个体的累计适应度函数值,生成与种群个体数量相等的[0,1]区间内的随机数,若该随机数小于或等于个体的累计适应度且大于前一个体的累积适应度,则选择该个体进入子代种群。8.根据权利要求1所述的方法,其特征在于,依据多个任意生成且符合模块接口间连接约束的模块化机器人拓扑结构及对应的数学表征、单个模块各个面接口坐标系在模块中心坐标系下的齐次变换矩阵,基于ga框架,通过编码、选择、交叉、变异、解码,获得同质模块化机器人最优拓扑,包括:任意生成[1,n
surf_con
]区间内的随机整数randnum1,任意生成[1,区间内的随机整数randnum2,对父
代和母代个体的c-co矩阵中元素进行交叉变换,其中,n
surf_con
表示单个模块的面接口个数;branch_con_n
i
(i=1,...,n
surf_con
)表示基座模块接口i上所连接的总模块个数。
技术总结
本发明实施例提供了一种同质模块化机器人拓扑优化算法,实现了同质模块化机器人拓扑结构优化,包括:获得单模块的面接口个数、类型、分布、连接面上的连接方位关系个数、可用模块总个数,并建立面接口与模块中心坐标系;进而分析获得模块接口间连接约束、单模块各面接口坐标系相对中心坐标系以及不同连接方位关系所对应的奇次变换矩阵、单模块与模块化机器人拓扑结构通用数学表征;任意生成多个符合模块接口间连接约束的拓扑结构及对应的数学表征;基于GA框架的编码、选择、交叉、变异,获得同质模块化机器人最优拓扑。根据本发明实施例提供的技术方案,可实现使用模块数量最少情况下工作空间最大的同质模块化机器人拓扑结构优化。化。化。
技术研发人员:陈钢 费军廷 谭春林 贾庆轩 孙丰磊 宋康 李彤
受保护的技术使用者:北京邮电大学
技术研发日:2021.11.23
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。