1.本发明属于交流电机振动噪声控制领域,具体涉及一种变频供电交流电机的低频振动噪声主动控制方法,用于变频供电交流电机的低频振动噪声抑制。
背景技术:
2.振动噪声是交流电机的一项重要考核指标,从控制方法上来分,交流电机的振动噪声控制通常分为被动控制和主动控制。传统被动控制主要是通过减隔振设计来阻隔或损耗振动噪声的传递,从而达到降低电机振动噪声的目的,如隔振器、阻尼材料等。但这些控制设备或材料与振动信号的频率成反比,往往控制设备体积庞大,不便于安装和维修,导致其仅对中高频段振动的控制有效,对低频段振动控制效果很差。
3.主动控制由于可以实现交流电机的振动噪声抵消且具有自适应改变能力,因而可以对电机低频振动噪声进行针对性的控制。该技术是利用振动噪声信号的相消干涉原理,通过交流电机的变频驱动控制系统产生与初始振动噪声信号频率相同、相位相反、幅值相近的抵消振动噪声信号,从而在交流电机目标考核点振动噪声区域与初始振动噪声信号发生相消干涉,达到降低或消除电机振动噪声的目的。交流电机的低频振动噪声主动控制技术对电机的中低频段振动噪声控制效果显著,具有成本低、体积小,便于安装等优点。
技术实现要素:
4.本发明的目的是克服现有振动噪声被动控制技术的不足,提供一种变频供电交流电机的低频振动噪声主动控制方法。
5.为了实现上述目的,本发明解决其技术问题所采用的技术方案是:一种变频供电交流电机的低频振动噪声主动控制方法,将交流电机目标考核点振动噪声信号和电机的电特征频谱信号共同作为自适应滤波器的输入,其输出作为补偿值叠加至电机电信号的参考量中,并参与交流电机的闭环驱动控制。
6.进一步的步骤如下:
7.步骤1,将交流电机目标考核点振动噪声传感器的原始输出信号经过滤波和衰减处理,去除其中的直流分量,保留交流分量并通过采样和运算得到电机的振动噪声信号,将该振动噪声信号作为自适应控制算法的偏差信号e(k);
8.步骤2,通过如下公式计算交流电机的电特征频谱信号x(k),作为自适应控制算法的参考信号:
[0009][0010]
式中f为交流电机的基波频率,n为电信号特征频次,an为对应特征频次的电信号幅值,为对应特征频次的电信号移相角,t(k)为第k次计算时刻,n为考核频段内的电信号最大特征频次;
[0011]
步骤3,使用自适应控制算法计算交流电机电信号的参考量补偿值
[0012]
以长度为m 1的时序参考信号向量x,以及当前时刻的偏差信号e(m)作为自适应滤波器的输入,以交流电机电信号的参考量补偿值y(m)作为自适应滤波器的输出,定义自适应滤波器的权系数向量w的长度为m,迭代步长为μ,根据如下公式进行迭代:
[0013][0014]
步骤4,将自适应滤波器的输出y(m)进行限幅处理,并叠加至交流电机电信号的参考量中,作用于交流电机的闭环驱动控制。
[0015]
本发明的有益效果是:
[0016]
针对交流电机振动噪声采用传统被动控制手段无法在保证体积、重量、尺寸均满足工程要求的情况下,有效控制交流电机的低频振动噪声及其传递,本发明从电机的驱动控制上采用自适应主动控制技术进行电磁激励源的抑制,可对低频振动噪声进行针对性的控制,解决交流电机低频电磁振动噪声特征线谱突出的问题。
附图说明
[0017]
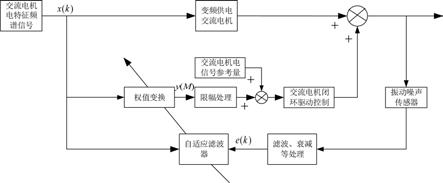
图1为变频供电交流电机的低频振动噪声主动控制方法结构示意图;
[0018]
图2为采用本发明低频振动噪声主动控制方法前后的振动噪声激励源信号仿真波形;
[0019]
图3为采用本发明低频振动噪声主动控制方法前后的振动噪声激励源信号频谱分析对比。
具体实施方式
[0020]
下面结合附图对本发明作进一步详细说明。
[0021]
图1所示,本发明公开的一种变频供电交流电机的低频振动噪声主动控制方法,将交流电机目标考核点振动噪声信号和电机的电特征频谱信号共同作为自适应滤波器的输入,其输出作为补偿值叠加至电机电信号的参考量中,并参与交流电机的闭环驱动控制。
[0022]
具体包括如下步骤:
[0023]
1,将交流电机目标考核点振动噪声传感器的原始输出信号经过滤波和衰减处理,去除其中的直流分量,保留交流分量并通过采样和运算得到电机的振动噪声信号,将该振动噪声信号作为自适应控制算法的偏差信号e(k)。
[0024]
2,将交流电机的电特征频谱信号作为自适应控制算法的参考信号x(k),并有如下形式:
[0025][0026]
式中f为交流电机的基波频率,n为电信号特征频次,an为对应特征频次的电信号
幅值,为对应特征频次的电信号移相角,t(k)为第k次计算时刻,n为考核频段内的电信号最大特征频次。
[0027]
3,使用自适应控制算法计算交流电机电信号的参考量补偿值。自适应滤波器的输入是长度为m 1的时序参考信号向量x,以及当前时刻的偏差信号e(m);自适应滤波器的输出为交流电机电信号的参考量补偿值y(m);自适应滤波器的权系数向量w,其长度为m,迭代步长为μ,并根据如下公式进行迭代。
[0028][0029]
4,将自适应滤波器的输出y(m)进行限幅处理,并叠加至交流电机电信号的参考量中,作用于交流电机的闭环电驱控制。
[0030]
图2为采用本发明所提出的变频供电交流电机低频振动噪声主动控制方法前后的振动噪声激励源信号仿真波形。其中,交流电机额定运行频率为24hz,负载转矩为500nm,主动控制系统的计算频率为10khz,自适应滤波器长度为20,步长为0.001,交流电机的等效振动噪声输入信号为
[0031]
x(k)=0.2sin[2πf
·
t(k) π/12] 0.3sin[4πf
·
t(k) π/3]。
[0032]
电机升速至24hz后,在1.2s处投入自适应滤波主动控制算法。
[0033]
图3为采用本发明所提出的变频供电交流电机低频振动噪声主动控制方法前后的振动噪声激励源信号频谱分析对比。
[0034]
从图2和图3可明显看出,在电机控制系统中施加低频振动噪声主动控制算法后,特征频次的振动噪声激励源信号可迅速减小。
[0035]
本发明公布的变频供电交流电机低频振动噪声主动控制方法中,自适应滤波器的长度和迭代步长与主动控制系统的调节时间、稳态误差以及特征频点处振动噪声信号的降低幅度均有着密切的关系。更高的滤波器长度有利于增强系统的鲁棒性,同时提高系统的稳态精度,但另一方面,受控制芯片的运算能力限制,滤波器长度过高会增大运算量,降低控制的实时性。此外,在系统稳定的前提下,适当增大迭代步长可以显著缩短调节时间。最优的滤波器参数需根据振动噪声信号的采样频率、频谱范围,以及主动控制系统的计算频率综合考量。
[0036]
本发明不局限于上述最佳实施方式,任何本领域技术人员在本发明的启示下都可以得出其它变形及改进的产品,但不论在其形状或结构上做任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。