技术特征:
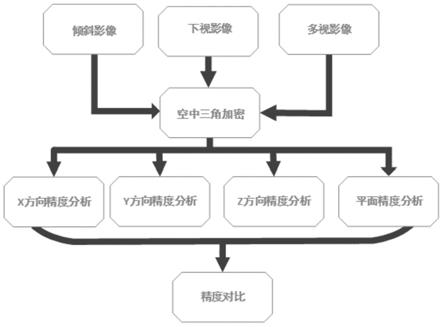
1.一种基于无人机倾斜摄影测量的空中三角形精度分析方法,其特征在于,具体步骤如下:步骤一:选取消费级无人机,搭载五镜头倾斜相机进行垂直和倾斜方位采集影像数据;步骤二:利用倾斜摄影测量方法对采集的影像数据,构成高分辨率的地区事物影像,构建三维模型;步骤三:进行空中三角形精度分析,具体步骤如下:在相同比例尺,对比不同控制点参与空中三角测量解算后,得到区域网平差精度,利用x方向、y方向、z方向和平面的误差计算公式来计算这四个方向的误差;其中x方向、y方向和z方向的差值vx,vy,vz为外业实测控制点中坐标值与其平差求解得到的坐标值的差,平面误差为x方向和y方向的误差平方和的平方根值,其中z方向也代表了高程误差,具体如下:其中m
x
,m
y
,m
z
,m
s
为x、y、z和平面方向误差。2.根据权利要求1所述的一种基于无人机倾斜摄影测量的空中三角形精度分析方法,其特征在于,所述五镜头倾斜相机对测区进行下视、前视、后视、左视、右视五个方向进行数据采集。3.根据权利要求1所述的一种基于无人机倾斜摄影测量的空中三角形精度分析方法,其特征在于,倾斜摄影测量方法,包括以下几个步骤:步骤1,将五镜头倾斜相机采集的场景利用大范围sfm算法分解为多个子区域,对每个子区域进行像素特征匹配和三维重建,最后,通过连接点对每个子区域形成的模型进行融合;步骤2,为了进行三维重建通过尺度不变特征变换sift匹配算法来匹配连接特征点,从而构建3d信息,sift算法首先是在尺度空间进行特征检测,并确定关键点的位置和关键点所处的尺度,然后使用关键点领域梯度的主方向作为该点的方向特征,以实现算子对尺度和方向的无关性;步骤3,光束法区域网平差方法具体是以一张像片组成的一束光线作为一个平差单元,以中心投影的共线方程作为平差的基础方程,通过各光线束在空间的旋转和平移,使像片之间的公共光线实现最佳的交汇,将整个区域最优归算到已知的控制点坐标系中,最终获取到加密点的地物坐标和像片的外方元素;步骤4、最终通过多视影像密集匹配和三维mesh的构建方法对多个不同视角拍摄的影像对空间场景中的实体进行三维信息的恢复和重建。
4.根据权利要求3所述的一种基于无人机倾斜摄影测量的空中三角形精度分析方法,其特征在于,大范围sfm算法是根据输入的倾斜影像的连接关系将大范围场景分解成多个子区域,并对各个子区域进行像素特征匹配以及3d重构,最后通过连接点将各个子区域形成的模型进行融合。5.根据权利要求3所述的一种基于无人机倾斜摄影测量的空中三角形精度分析方法,其特征在于,sift匹配算法的具体步骤如下:(1),构建尺度空间,由输入图像的函数与高斯函数的核进行卷积构成,并进行二次抽样,将尺度空间进行差分得到高斯差分空间,并生成高斯差分金字塔,具体如下:d(x,y,δ)=[g(x,y,δ)-g(x,y,ωδ)]*i(x,y)=l(x,y,δ)-i(x,y,ωδ)其中g(x,y,δ)为高斯函数,i(x,y)为原图像,两者卷积即构成尺度空间l(x,y,δ),δ为尺度因子,ω为相邻尺度空间的比例因子,d(x,y,δ)为高斯差分空间;(2),检测尺度空间极值点:在dog尺度空间本层以及上下两层的26个领域中最大或者最小值,为了精确定位极值点,需要去除低对比度的关键点和不稳定的边缘响应点;其中根据拟合三维二次函数来精确定位极值点的位置和尺度,该函数为x为极值点的偏移量,d为d(x,y,δ)在关键点的值;去除对比度低的极值点:(一般取0.03);去除不稳定的边缘响应点:一个定义不好的dog算子的极值在横跨边缘的地方有较大的主曲率,在垂直边缘的方向有较小的主曲率;主曲率通过2
×
2的hessian矩阵h求出:导数d由相邻采样点的差值估计得到;再根据不等式检测主曲率是否在某领域ε下,不满足则剔除改极值点;(3),计算极值点的主方向,根据高斯差分金字塔所采测出的极值点所在的高斯金字塔处的梯度模值和方向特征,模值和方向公式分别为如下所示:处的梯度模值和方向特征,模值和方向公式分别为如下所示:(4),极值点的描述,对于每一个极值点使用4
×
4共16种子点来描述,这样对于一个极值点就可以产生128个数据,即最终完成128维的sfit特征向量;(5),极值点的匹配,当两幅影响经过sfit提取的影像特征向量生成后,采用极值点特征向量的欧式距离来作为两幅影像的极值点的相似性判定度量,在两幅图的极值点中,如果最近距离除以次近距离少于某个比例阈值,则接受该匹配点。6.根据权利要求3所述的一种基于无人机倾斜摄影测量的空中三角形精度分析方法,
其特征在于,所述光束法区域网平差方法是以控制点和待定点的像点坐标为观测值,以待定成像参数和待定点的物方空间坐标为替代解求参数的解算方法,其中运用到的平差求解,是以高斯牛顿迭代的方法进行的;为了使观测值误差平方和总数最小,即误差非线性函数f(x)的构成的最小二乘问题,寻找增量vx,使得||f(x vx)||2达到最小;将目标函数的平方项展开,再对展开式求其增量vx的导数,令其为零,得到下式:2[f(x)
′
]
t
f(x)vx=-[f(x)
′
]
t
f(x)根据高斯牛顿法对上述等式求解,首先给定初值为x0,并进行迭代,对于第n次迭代,求出当前的雅可比矩阵j(x
n
)和误差f(x
n
),再次求解增量方程,若增量vx足够小的话,则停止迭代,否则,令x
n 1
=x
n
vx
n
,并返回迭代。
技术总结
本发明涉及无人机测绘测量技术领域,尤其是一种基于无人机倾斜摄影测量的空中三角形精度分析方法,具体步骤如下:利用消费级无人机搭载轻型便捷的五镜头倾斜相机,并采用倾斜摄影技术原理进行数据采集,通过运用空中三角测量解算,最终根据外业实测数据进行精度分析和评定,分析不同控制点布设方案对倾斜摄影测量的空中三角测量的精度影响进行分析,从中选择最佳的空三加密成果引入到重建三维场景的中,为无人机摄影技术的应用实施提供可行方案。案。案。
技术研发人员:陈豪 王佳伟 计渊 沈泽远 姚跃 贺忠义 武天龙 朱岚康 韩玮 郭延达 朱仁杰 胡沈涛
受保护的技术使用者:国网浙江省电力有限公司嘉兴供电公司
技术研发日:2021.10.26
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。