1.本发明涉及计算流体力学(cfd)中湍流模型领域,特别涉及一种基于改进rans模型长度实现的脱体涡模拟模型构造方法。
背景技术:
2.在对湍流边界层分离流动问题进行数值模拟时,工程上常用的雷诺平均模型(rans)无法给出准确的预测结果,而较为准确的直接数值模拟(direct numerical simulation,dns)和大涡模拟(large eddy simulation,les)计算量过大难以实用化。脱体涡模拟(detached eddy simulation,des)是一种计算量适中且预测精度较好的模型,已经被广泛的应用于商业或in-house数值模拟软件中。des模型是在常用rans模型的基础上,通过比较当地网格尺度和平均流动的长度尺度,对模型方程的源项进行合适的修正,但现有des模型的预测准确性依然存在待优化问题。
技术实现要素:
3.针对现有技术中存在的问题,提供了一种脱体涡模拟模型构造方法及计算机程序,基于改进rans模型长度实现,在当前工程中广泛采用的des模型基础上,通过引入更合理的当地平均流动长度尺度近似,以改进控制方程的源项,进而提高des模型的精度。
4.本发明采用的技术方案如下:一种脱体涡模拟模型构造方法,通过改进rans模型长度实现,包括以下步骤:步骤1、获取rans模型控制方程中的湍动能破坏项,确定湍动能破坏项中的长度尺度;步骤2、对长度尺度进行修正,完成新的替代破坏项构建;步骤3、将新的替代破坏项替代原控制方程中的湍动能破坏项,并对新的替代破坏项进行网格尺度修正,得到新的改进脱体涡模型的控制方程;步骤4、基于改进脱体涡模型控制方程构建计算机程序,读取流场数据,利用数值方法离散求解改进模型的控制方程,得到关于湍流粘性系数的时间空间演变的数据。
5.进一步的,所述步骤2中,修正后的长度尺度为:其中,为卡门常数,为经验系数,为普朗特混合长度,定义为:其中,为湍流涡粘性系数,为流场的涡量,为由速度场梯度得到的反对称张量;,分别表示空间中i方向和j方向的坐标,i与j取值为1、2、3表示空间的三个方向;为流体的速度矢量在方向的分量,为流体的速
度矢量在方向的分量。
6.进一步的,所述步骤2中替代破坏项为:其中,为控制方程的输送变量,表示联系与湍动能之间的因子。
7.进一步的,所述网格尺度修正的具体方法为:采用替代修正后的长度尺度;其中,为当地最大网格尺度,。
8.进一步的,所述rans模型为s-a模型、k-ω sst模型、k-ω模型或者k-kl模型。
9.本发明还提供了一种电子设备,包括:存储器,用于存储可执行指令;以及处理器,用于与所述存储器通信以执行所述可执行指令从而完成上述的基于改进rans模型长度的脱体涡模拟模型构造方法对应的过程。
10.本发明还提供了一种计算机存储介质,用于存储计算机可读取的指令,所述指令被执行时执行上述的基于改进rans模型长度的脱体涡模拟模型构造方法。
11.与现有技术相比,采用上述技术方案的有益效果为:本发明提出的模型构造方法,在模拟含分离的湍流流动时,能够更合理地自动区分需要使用rans的近壁区域和需要使用les的远离壁面区域,使对流动的解析更加精准,能够在较为苛刻的网格分辨率条件下得到最优的数值模拟结果。
附图说明
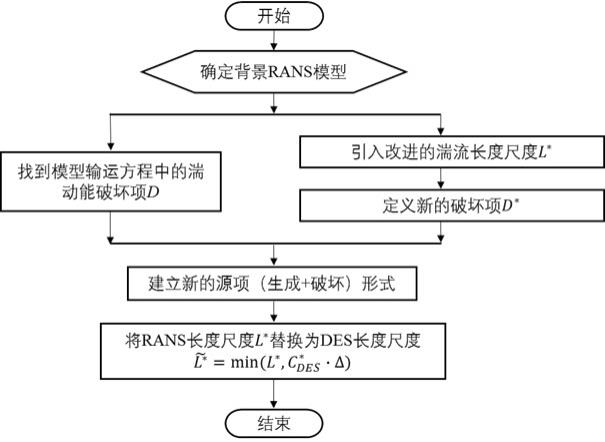
12.图1为本发明提出的基于改进rans模型长度的脱体涡模拟模型构造方法流程图。
13.图2为本发明一实施例中长度尺度l^*沿壁面法向的分布以及与s-a和sst模型长度尺度的对比图。
14.图3为本发明一实施例中圆柱绕流数值验证过程中的瞬时流场涡结构示意图。
15.图4为本发明一实施例中圆柱绕流数值验证过程中的尾迹区的流向速度分布示意图。
16.图5为本发明一实施例中圆柱绕流数值验证过程中的尾迹区的流向脉动速度分布示意图。
17.图6为本发明一实施例中圆柱绕流数值验证过程中的尾迹区的法向脉动速度示意图。
18.图7为本发明一实施例中naca0012翼型大攻角绕流数值验证过程中的瞬时流场涡结构示意图。
19.图8为本发明一实施例中naca0012翼型大攻角绕流数值验证过程中的表面压力系数比较示意图。
具体实施方式
20.下面结合附图对本发明做进一步描述。
21.实施例1
如图1所示,一种基于改进rans模型长度的脱体涡模拟模型构造方法,包括以下步骤:步骤1、获取rans模型控制方程中的湍动能破坏项,确定湍动能破坏项中的长度尺度;步骤2、对长度尺度进行修正,完成新的替代破坏项构建;步骤3、将新的替代破坏项替代原控制方程中的湍动能破坏项,并对新的替代破坏项进行网格尺度修正,得到新的改进脱体涡模型的控制方程;步骤4、基于改进模型控制方程构建计算机程序,读取流场数据,利用数值方法离散求解改进模型的控制方程,得到关于湍流粘性系数的时间空间演变的数据,该方法相较于相比于原始模型得到的数据具有更高的精度。
22.具体的,本实施例中以应用最广泛rans模型的s-a模型(基于spalart-allmaras一方程rans模型)和k-ω sst模型为例,对步骤1进行详细说明:s-a模型的控制方程为:(1)该模型原始破坏项为,模型长度尺度即为最小壁面距离,k-ω sst模型的控制方程为:(2)(3)其中,,该模型的原始破坏项为,模型长度尺度为。
23.步骤2中,基于普朗特混合长度对模型长度尺度进行修正,修正后的长度尺度为:(4)其中,为卡门常数,为经验系数,为普朗特混合长度,定义为:(5)其中,为湍流涡粘性系数,为流场的涡量,为由速度场梯度得到的反对称张量;,分别表示空间中i方向和j方向的坐标,i与j取
值为1、2、3表示空间的三个方向;为流体的速度矢量在方向的分量,为流体的速度矢量在方向的分量。
24.改进的模型长度尺度可适用于任意基于涡粘性假设的rans模型,且对于典型的壁湍流,沿壁面法向的分布更加接近于实验或dns数据。基于可以引入新的破坏项:(6)其中,为控制方程的输送变量,表示联系与湍动能之间的因子。
25.针对上述两个模型进行具体说明:s-a模型:则:(7)k-ω sst模型:,则:(8)将(7)(8)两式分别引入(1)(2)两式的右端,分别得到:(9)(10)可以看到得到的(9)式和(10)式分别与原rans模型方程(即(1)式和(2)式)完全相同。
26.最后引入网格尺度修正项完成改进的des模型的构造,具体方法为:采用替换完成网格尺度修正项的引入,其中,。
27.需要特别说明,以上过程以航空航天中最常用的s-a模型和k-ω sst模型为例进行阐述。本发明提出的方案可以用于任意基于涡粘性假设的rans模型,如k-ω模型、k-kl模型等。
28.最后,通过读取流场数据,并采用相应的离散方法求解改进脱体涡模型(des)的控制方程,得到湍流粘性系数的时间空间演化数据,该数据可以使航空航天领域的流动数值仿真结果更加准确。
29.本实施例还给出了沿着湍流平板边界层的壁面法向方向,由k-ω sst模型得到的长度尺度分布(点划线)和改进长度尺度(实线)的对比,图中蓝色散点为实验测量结果,具体如图2所示。
30.图3、图4、图5、图6是使用基于spalart-allmaras一方程rans模型构造的脱体涡模拟(简称s-a des,也有文献简称为des97)模型对圆柱绕流问题进行数值仿真的结果。其中图3是采用本发明所提供的改进方法得到的流动瞬时旋涡结构。图4比较了改进方法和原始方法得到的尾迹区平均速度分布,其中实线为原始方法结果,点划线为改进方法结果,圆点为实验测量结果。图5和图6分别比较了改进方法和原始方法得到的尾迹区三个流向位置上流向脉动速度和法向脉动速度分布,其中实线为原始方法结果,点划线为改进方法结果,圆点为实验测量结果。图7、图8是使用s-a des模型对naca 0012翼型大攻角绕流问题进行数值仿真的结果,其中图7是采用本发明所提供的改进方法得到的流动瞬时旋涡结构。图8比较了改进方法和原始方法得到的沿翼型表面的压力系数分布,其中实线为原始方法结果,点划线为改进方法结果,圆点为实验测量结果。以上两个算例结果的对比说明了本发明所提供模型构造方法对流动数值仿真结果的改进。
31.实施例2在实施例1的基础上,本实施例还提供了一种电子设备,包括:存储器,用于存储可执行指令;以及处理器,用于与所述存储器通信以执行所述可执行指令从而完成实施例1中基于改进rans模型长度的脱体涡模拟模型构造方法对应的过程。
32.实施例3在实施例1的基础上,本实施例还提供了一种计算机存储介质,用于存储计算机可读取的指令,所述指令被执行时执行实施例1中的基于改进rans模型长度的脱体涡模拟模型构造方法。
33.本发明并不局限于前述的具体实施方式。本发明扩展到任何在本说明书中披露的新特征或任何新的组合,以及披露的任一新的方法或过程的步骤或任何新的组合。如果本领域技术人员,在不脱离本发明的精神所做的非实质性改变或改进,都应该属于本发明权利要求保护的范围。
34.本说明书中公开的所有特征,或公开的所有方法或过程中的步骤,除了互相排斥的特征和/或步骤以外,均可以以任何方式组合。
35.本说明书中公开的任一特征,除非特别叙述,均可被其他等效或具有类似目的的替代特征加以替换。即,除非特别叙述,每个特征只是一系列等效或类似特征中的一个例子而已。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。