技术特征:
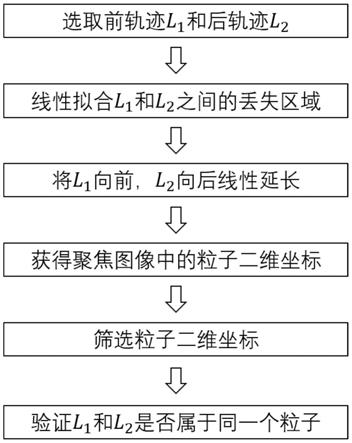
1.一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,包括以下步骤:步骤s1、选择前轨迹和后轨迹;步骤s2、线性拟合前轨迹和后轨迹之间的丢失区域;步骤s3、根据需求向前线性拟合前轨迹,向后线性拟合后轨迹到所需长度;步骤s4、通过图像识别算法获得拟合位置样品图像中的粒子二维坐标;步骤s5、通过位置预测算法筛选粒子二维或三维坐标;步骤s6、若为三维轨迹则恢复拟合位置的三维信息;步骤s7、验证前轨迹和后轨迹是否属于同一个粒子。2.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,前轨迹l1为随机选择,后轨迹l2为前轨迹l1周围同时满足时间和空间双重限制条件的轨迹;时间限制条件为1≤f
21-f
1end
≤f,f
1end
到f
21
之间的帧称为丢失区域,f为时间限制参数,f
1end
为前轨迹l1的最后一帧,f
21
为后轨迹l2的第一帧;空间限制条件为0≤d
gap
≤maxd0 (f
21-f
1end-1)maxd1;其中,maxd0为单帧最大位移maxd0,maxd1为多帧最大位移,前轨迹l1的最后一个点到后轨迹l2的第一个点的距离为d
gap
;对于任意的前轨迹l1,符合时间和空间限制条件的所有轨迹都能够选为属于该前轨迹l1的后轨迹l2。3.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,步骤s2包括:将前轨迹l1和属于这条前轨迹l1的一条后轨迹l2进行线性拟合,用线段l连接前轨迹l1的最后一个点和后轨迹l2的第一个点,在这条线段l上均匀地取f
21-f
1end
1个位置,并去掉线段l两个端点的位置即为前轨迹l1和后轨迹l2之间丢失区域的线性拟合位置,f
21
为后轨迹l2的第一帧,f
1end
为前轨迹l1的最后一帧。4.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,步骤s3包括以下步骤:设n为延长拟合参照帧数,n≥1并且小于前轨迹l1和后轨迹l2包含的帧数,设延长帧数m;取前轨迹l1的前n个点,对这n个点的时间坐标t和坐标(x、y)进行线性回归,获得坐标(x、y)相对于时间坐标t的线性方程:x(t)=k
x
t b
x
y(t)=k
y
t b
y
其中k
x
为x相对于t的斜率,b
x
为x相对于t的截距,k
y
为y相对于t的斜率,b
y
为y相对于t的截距;设前轨迹l1的第一帧为f
11
,将线性方程x(t)、y(t)代入时间坐标t=f
11-1到f
11-m即得前轨迹l1向前一帧到m帧的线性预测位置的坐标(x、y);若为三维轨迹,对这n个点的时间坐标t和坐标z进行线性回归,获得坐标z相对于时间坐标t的线性方程:z(t)=k
z
t b
z
其中k
z
为z相对于t的斜率,b
z
为z相对于t的截距;设前轨迹l1的第一帧为f
11
,将线性方程z(t)代入时间坐标t=f
11-1到f
11-m即得前轨迹l1向前一帧到m帧的线性预测位置的坐标z;
设n为延长拟合参照帧数,n≥1并且小于前轨迹l1和后轨迹l2包含的帧数,设延长帧数m;取后轨迹l2的后n个点,对这n个点的时间坐标t和坐标(x、y)进行线性回归,获得坐标(x、y)相对于时间坐标t的线性方程:x(t)=k
x
t b
x
y(t)=k
y
t b
y
其中k
x
为x相对于t的斜率,b
x
为x相对于t的截距,k
y
为y相对于t的斜率,b
y
为y相对于t的截距;设后轨迹l2的最后一帧为f
2end
,将线性方程x(t)、y(t)代入时间坐标t=f
2end
1到f
2end
m即得后轨迹l2向后一帧到m帧的线性预测位置的坐标(x、y);若为三维轨迹,对这n个点的时间坐标t和坐标z进行线性回归,获得坐标z相对于时间坐标t的线性方程:z(t)=k
z
t b
z
其中k
z
为z相对于t的斜率,b
z
为z相对于t的截距;设后轨迹l2的最后一帧为f
2end
,将线性方程z(t)代入时间坐标t=f
2end
1到f
2end
m即得后轨迹l2向后一帧到m帧的线性预测位置的坐标z;步骤s2和步骤s3中获得的线性拟合位置统称为拟合位置,记为(x
f
,y
f
),若为三维轨迹则记为(x
f
,y
f
,z
f
)。5.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,所述图像识别算法包括以下内容:设光强阈值为t,在样品图像中,选出所有光强大于t的像素,其中所有相邻的像素属于同一个粒子,将粒子包含的所有像素的二维坐标平均值或光强加权后的坐标平均值作为粒子的二维坐标(x
′
,y
′
)。6.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,所述位置预测算法为:设j为位置预测参照帧数,取前轨迹l1的后j个点,对这j个点的时间坐标t和坐标(x、y)进行线性回归,获得坐标(x、y)相对于时间坐标t的线性方程:x(t)=k
x
t b
x
y(t)=k
y
t b
y
其中k
x
为x相对于t的斜率,b
x
为x相对于t的截距,k
y
为y相对于t的斜率,b
y
为y相对于t的截距;将线性方程x(t)、y(t)代入t=f
1end
1即得前轨迹l1向后一帧的线性预测位置的坐标(x、y),获得的预测坐标记为(x
p
,y
p
),其中f
1end
为前轨迹l1的最后一帧;在前轨迹l1向后一帧中,计算所有粒子的二维坐标(x
′
,y
′
)到预测坐标(x
p
,y
p
)的距离,距离(x
p
,y
p
)最近的(x
′
,y
′
)选为前轨迹l1向后一帧的粒子二维坐标,记为(x
r
,y
r
),把(x
r
,y
r
)置于前轨迹l1的末尾;若为三维轨迹则把(x
r
,y
r
,z
f
)置于前轨迹l1的末尾,成为新的前轨迹l1的最后一点,重复该步骤,直到时间坐标t为丢失区域的中间帧;设j为位置预测参照帧数,取后轨迹l2的前j个点,对这j个点的时间坐标t和坐标x、y进
行线性回归,获得坐标x、y相对于时间坐标t的线性方程:x(t)=k
x
t b
x
y(t)=k
y
t b
y
其中k
x
为x相对于t的斜率,b
x
为x相对于t的截距,k
y
为y相对于t的斜率,b
y
为y相对于t的截距;将线性方程x(t)、y(t)代入t=f
21-1即得后轨迹l2向前一帧的线性预测位置的坐标x、y,其中f
21
为后轨迹l2的第一帧,这样获得的预测坐标记为(x
p
,y
p
);在后轨迹l2向前一帧中,计算所有粒子的二维坐标(x
′
,y
′
)到预测坐标(x
p
,y
p
)的距离,距离(x
p
,y
p
)最近的(x
′
,y
′
)选为后轨迹l2向前一帧的粒子二维坐标,记为(x
r
,y
r
),把(x
r
,y
r
)置于后轨迹l2的开头;若为三维轨迹则把(x
r
,y
r
,z
f
)置于后轨迹l2的开头,成为新的后轨迹l2的第一点,重复该步骤,直到时间坐标t为丢失区域的中间帧的后一帧;对前轨迹l1的向前线性拟合帧和后轨迹l2的向后线性拟合帧同样如此执行该步骤。7.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,步骤s6具体包括:若样品图像中含有三维信息,则在样品图像的坐标(x
r
,y
r
)处,使用该三维信息对应的方式获取(x
r
,y
r
,z
f
)的z坐标,记为z
r
,则该粒子坐标为(x
r
,y
r
,z
r
);对光场中每一层不同的z,其中坐标(x
r
,y
r
)对应的粒子所包含的所有像素的强度的和为i
z
,每个不同的z都有一个i
z
,对i
z
和z进行高斯拟合,拟合结果的最大值记为z
r
,粒子的三维坐标即为(x
r
,y
r
,z
r
)。8.根据权利要求7所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,样品图像中含有三维信息为全息图像、双目视觉、全内反射光强图。9.根据权利要求8所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,当三维信息为全息图像时,通过高斯拟合获得粒子的三维坐标:设z
g
为高斯拟合范围,在坐标(x
r
,y
r
,z
f
)处,通过rayleigh-sommerfeld算法,对全息图像进行三维重建,获取z
f-z
g
到z
f
z
g
的三维光场,计算公式如下:u(r,z)=ft-1
(ft(i
s
(r,0)
·
h(q,-z)))式中,h(r,-z)为瑞利索末菲传播子,r和z分别为拟合位置的横向坐标和纵向坐标,i为虚数单位,k为波数,r为光传播的距离,u(r,z)是三维重建所得的光场,i
s
(r,0)为全息图像在r处的光强,ft-1
、ft分别为傅里叶逆变换和傅里叶变换,h(q,-z)为h(r,-z)的傅里叶变换,q为频域坐标。10.根据权利要求1所述的一种运动粒子的二维及三维示踪轨迹续连方法,其特征在于,步骤s7的验证为:设纠错距离为wrong_d,计算前轨迹l1的最后一点到后轨迹l2的第一点的距离d
finish
,若大于wrong_d,则前轨迹l1和后轨迹l2不属于同一个粒子,否则前轨迹l1和后轨迹l2属于同一个粒子。
技术总结
本发明公开了一种运动粒子的二维及三维示踪轨迹续连方法,包括以下步骤:选择前轨迹,根据前轨迹找到其相应的后轨迹;拟合前轨迹和后轨迹之间的粒子空间位置;根据需求向前拟合前轨迹和向后拟合后轨迹;基于图像识别获取拟合位置的粒子二维或三维位置;设置纠错距离,对前轨迹和后轨迹的归属是否正确进行判断;本发明同时适用于二维或三维轨迹,能续连已有的碎片式轨迹,补齐碎片轨迹之间的丢失区域,若轨迹长度不足则向两端延长轨迹,有效增加了轨迹点数目。因此,该发明可显著提升粒子示踪技术的准确性和实用性,适用于对各种宏观和微观运动中的多个目标粒子进行同时示踪。运动中的多个目标粒子进行同时示踪。运动中的多个目标粒子进行同时示踪。
技术研发人员:龚湘君 王淦诚 张广照
受保护的技术使用者:华南理工大学
技术研发日:2021.10.21
技术公布日:2022/3/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。