一种基于无人机载wifi探针的多移动设备定位方法
技术领域
1.本发明涉及移动设备定位技术领域,尤其是涉及一种基于无人机载wifi探针的多移动设备定位方法。
背景技术:
2.近年来,智能手机等移动设备成为了大多数人随身必备的物品之一。这些移动设备往往都有wifi功能,并且大多数人会选择默认开启这一功能。为了探测周围存在的wifi接入点,开启wifi的移动设备会不断向周围发送probe request(探测请求)帧,其中包含发送时间、设备mac地址、信号强度等信息。wi-fi探针可以通过捕获probe request帧来感知附近的wifi设备,并且可以通过信号强度(rssi)换算得到wi-fi设备与探针之间的大致距离。
3.wifi探针技术常用于人流统计和目标定位。如,公开号为cn112584491a的文献公开了一种基于wifi探针的目标定位系统,以对目标在建筑内的楼层进行定位。公开号为cn111866725a的文献公开了一种基于wifi探针技术的人流检测方法,用于监测人流量及轨迹。然而,目前的wifi探针技术大都基于固定位置,必须要提前在实地部署才能使用;同时,在灾害场景下,当提前部署的wifi探针遭到破坏或网络中断时,其也不能发挥作用。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于无人机载wifi探针的多移动设备定位方法。
5.本发明的目的可以通过以下技术方案来实现:
6.一种基于无人机载wifi探针的多移动设备定位方法,该方法包括:
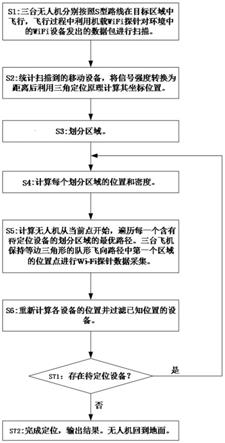
7.s1、多台无人机在目标区域中分别按设定路径飞行,飞行过程中利用机载wifi探针对环境中的移动设备进行粗略扫描;
8.s2、根据粗略扫描结果初始化待定位的移动设备列表,并初步获取待定位的移动设备的位置坐标;
9.s3、对目标区域进行区域划分;
10.s4、计算每个划分区域的位置以及当前待定位的移动设备的密度;
11.s5、计算无人机从当前点开始,遍历每一个含有待定位移动设备的划分区域的最优路径;
12.s6、多台无人机组成阵列按照规划的最优路径飞向第一个划分区域,在划分区域中,无人机阵列精确扫描该划分区域内的移动设备,确定移动设备的位置坐标并更新待定位的移动设备列表;
13.s7、判断是否仍然存在待定位的移动设备,如是则重复步骤s4~s6,否则完成定位。
14.优选地,步骤s2具体包括:
15.s21、统计来自同一移动设备的数据包;
16.s22、对于所有数据包,将信号强度转换为距离;
17.s23、利用三角定位原理计算每个移动设备的位置;
18.s24、将这些设备添加到待定位的移动设备列表。
19.优选地,步骤s4中划分区域的位置为该划分区域内所有待定位的移动设备的平均位置。
20.优选地,步骤s4中划分区域内待定位的移动设备的密度为该划分区域内待定位的移动设备的数量。
21.优选地,步骤s5具体为:
22.s51、计算划分区域之间的距离:
[0023][0024]
其中,d
i,j
为第i个划分区域和第j个划分区域之间的距离,xi、yi为第i个划分区域的位置坐标,xj、yj为第j个划分区域的位置坐标,nj为第j个划分区域中当前待定位的移动设备的密度,max(n)为所有划分区域中当前待定位的移动设备的密度的最大值,n为划分区域的总个数,wj和hj为第j个划分区域的宽度和高度,α为密度影响系数;
[0025]
s52、基于无人机当前点的位置信息以及划分区域之间的距离利用启发式算法求解最优路径。
[0026]
优选地,步骤s52中求解最优路径的启发式算法包括模拟退火算法、遗传算法、蚁群算法。
[0027]
优选地,步骤s6中无人机阵列精确扫描划分区域内的移动设备时多台无人机以当前精确扫描的划分区域的计算位置为中心点并环绕该划分区域进行扫描。
[0028]
优选地,步骤s6中确定移动设备的位置坐标并更新待定位的移动设备列表具体包括:
[0029]
s61、计算当前扫描的划分区域中各移动设备的位置坐标;
[0030]
s62、对于该划分区域内的移动设备,若在连续m次扫描中都位于同一划分区域,则确定其精确坐标并标记为已定位移动设备并从当前待定位的移动设备列表中删除,若出现新的移动设备则将其增加至待定位的移动设备列表中。
[0031]
优选地,采用三台无人机进行定位,在粗略扫描阶段,三台无人机分别按照s形路线在目标区域中飞行。
[0032]
优选地,在精确扫描阶段,三台无人机保持等边三角形的队形扫描各个划分区域。
[0033]
与现有技术相比,本发明具有如下优点:
[0034]
(1)本发明创造性地提出一种利用无人机载wifi探针进行移动设备定位的方法,多台无人机飞向目标点位各自采集、相互交换wifi数据后对移动设备进行定位,输出设备位置、密度图等信息,该方法使定位区域可以任意选择,无需提前部署设备,为了应对定位精度的问题,本专利引入了“区域划分”这一概念,在兼顾实用性的同时使得定位误差保持在可接受的范围内。
[0035]
(2)本发明本专利创造性地提出一种用于移动设备定位的无人机飞行轨迹方案,使得无人机在保证总扫描时间相对短的情况下,优先完成人群密度高的区域的扫描,并且
可以实现对设备的准确和持续的定位。
附图说明
[0036]
图1为本发明一种基于无人机载wifi探针的多移动设备定位方法的流程框图。
[0037]
图2为无人机s形飞行路线的示意图。
[0038]
图3为无人机扫描某一划分区域时的示意图。
具体实施方式
[0039]
下面结合附图和具体实施例对本发明进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本发明并不意在对其适用物或其用途进行限定,且本发明并不限定于以下的实施方式。
[0040]
实施例
[0041]
如图1所示,本实施例提供一种基于无人机载wifi探针的多移动设备定位方法,该方法包括:
[0042]
s1、多台无人机在目标区域中分别按设定路径飞行,飞行过程中利用机载wifi探针对环境中的移动设备进行粗略扫描;
[0043]
s2、根据粗略扫描结果初始化待定位的移动设备列表,并初步获取待定位的移动设备的位置坐标;
[0044]
s3、对目标区域进行区域划分;
[0045]
s4、计算每个划分区域的位置以及当前待定位的移动设备的密度;
[0046]
s5、计算无人机从当前点开始,遍历每一个含有待定位移动设备的划分区域的最优路径;
[0047]
s6、多台无人机组成阵列按照规划的最优路径飞向第一个划分区域,在划分区域中,无人机阵列精确扫描该划分区域内的移动设备,确定移动设备的位置坐标并更新待定位的移动设备列表,无人机阵列精确扫描划分区域内的移动设备时多台无人机以当前精确扫描的划分区域的计算位置为中心点并环绕该划分区域进行扫描;
[0048]
s7、判断是否仍然存在待定位的移动设备,如是则重复步骤s4~s6,否则完成定位。
[0049]
本实施例优选采用三台无人机进行定位,在粗略扫描阶段,三台无人机分别按照s形路线在目标区域中飞行。在精确扫描阶段,三台无人机保持等边三角形的队形扫描各个划分区域。在其他优选实施例中,也可以采用三台以上的无人机进行定位扫描,满足如下扫描方式即可:在粗略扫描阶段,多台无人机的扫描范围能覆盖整个目标区域,使得所有移动设备均能扫描出来;在精确扫描阶段,多台无人机环绕待扫描的划分区域,如采用四台无人机时,形成环形阵列。
[0050]
以下,以三台无人机进行定位具体说明本发明的具体执行方案:
[0051]
步骤s1按照s形路线进行飞行的有益效果为:使无人机尽可能保持直线飞行,加快扫描速度;不同无人机以最短的总路径长度完成对整个区域的扫描。图2为步骤s1中无人机飞行路线的示意图,其包括以下步骤:
[0052]
s11:根据目标区域的大小,计算每台无人机的s形飞行路径轨迹点。两台无人机的
平行扫描轨迹之间的距离不能超过2r,其中r为wifi探针最远探测距离,以保证区域中所有的wifi设备都能被探测到,本实施例中台无人机的平行扫描轨迹之间的距离取
[0053]
s12:三台无人机分别按照预先计算的轨迹点飞行,飞行过程中利用机载wifi探针对环境中的wifi设备发出的数据包进行扫描并提取部分信息存储。存储格式为(时间,设备mac地址,信号强度rssi,无人机编号,无人机位置)。
[0054]
s13:两台从无人机将获取的数据发送到主无人机上。
[0055]
步骤s2包括以下步骤:
[0056]
s21:统计来自同一移动设备(其mac地址相同)的数据包。
[0057]
s22:对于所有数据包,将信号强度(rssi)转换为距离。转换公式为
[0058][0059]
其中pd为在距离d处的wifi探针接收的信号强度,p
d0
为设备在距离1m处的参考信号强度,n为路径衰减指数。
[0060]
s23:利用三角定位原理计算每个设备的位置。设备的位置(x,y)满足
[0061]
(x-xi)2 (y-yi)2=d
i2
,
[0062]
其中(xi,yi)为wifi探针位置,di为wifi探针与设备的距离。该设备的每一个数据包都满足该关系,使用最小二乘法求出设备的位置(x,y)。
[0063]
s24:将这些设备添加到待定位设备列表。
[0064]
进一步地,在步骤s3中,划分区域为人为指定的任意区域。引入划分区域的有益效果为,其更符合灾后搜救的实际需求。某一移动设备的具体位置并不是那么重要(可能存在人员走动等情况;定位误差总会存在,如果在精度上不是数量级的提升,对救援人员没有实际意义),救援人员更关心在具体区域(如某一建筑、某一树林)内,是否有被困人员存在,以及大概人数。通过多次测量,保证设备所处在的划分区域的正确性,而容忍设备在划分区域内部的位置误差。
[0065]
依据需求不同,划分区域可以是预先规定的任意形状的区域,如矩形、圆形、不规则图形,只需要满足所有区域的集合是对目标区域的划分即可。优选地,在本方法中以矩形来表示所有的划分区域。矩形可以大大减少对该区域存储所需的空间(用四元组表示即可),降低算法的复杂度。划分区域除了可以是大小不一的矩形外,在没有特殊需求的情况下也可以是对目标区域进行平均划分形成的矩形。
[0066]
步骤s4中划分区域的位置为该划分区域内所有待定位的移动设备的平均位置。划分区域内待定位的移动设备的密度为该划分区域内待定位的移动设备的数量。
[0067]
步骤s5包括以下步骤:
[0068]
s51:计算划分区域之间的距离。计算公式为
[0069][0070]
其中,d
i,j
为第i个划分区域和第j个划分区域之间的距离,xi、yi为第i个划分区域的位置坐标,xj、yj为第j个划分区域的位置坐标,nj为第j个划分区域中当前待定位的移动设备的密度,max(n)为所有划分区域中当前待定位的移动设备的密度的最大值,n为划分区域的总个数,wj和hj为第j个划分区域的宽度和高度,α为密度影响系数。使用该种计算方式
的有益效果为,在距离相同的情况下,该种计算方式可以使无人机优先飞向设备密度更大的区域进行搜寻,在尽可能短的时间内完成尽可能多的设备定位,为灾害监测和救援争取时间。
[0071]
s52:将最优路径问题看作旅行商问题求解。由于该问题是np难问题,难以在多项式时间内找到精确答案,因此利用启发式算法(如模拟退火算法、遗传算法、蚁群算法)在规定时间内寻找相对较好的解答。例如,本实施例中利用模拟退火算法求解。
[0072]
步骤s6具体为:三台飞机保持等边三角形的队形飞向最优路径中第一个区域的位置点,通过机载wifi探针进行数据采集。确定移动设备的位置坐标并更新待定位的移动设备列表,具体包括:
[0073]
s61、计算当前扫描的划分区域中各移动设备的位置坐标;
[0074]
s62、对于该划分区域内的移动设备,若在连续m次扫描中都位于同一划分区域,则确定其精确坐标并标记为已定位移动设备并从当前待定位的移动设备列表中删除,若出现新的移动设备则将其增加至待定位的移动设备列表中。
[0075]
通过维护待定位设备列表,一方面保证每个设备在确定位置之前都经过多次扫描且所处位置收敛;另一方面设备位置可以随时间动态更新,实现持续监测。
[0076]
本发明提出的一种利用无人机载wifi探针进行多目标定位的方法,利用机载的wifi探针,三台无人机按照一定轨迹飞行并对环境中的wifi数据包进行扫描,同时相互通信接收到的数据包,根据接收到数据包的信号强度实现对移动设备的定位,输出设备位置、密度图等信息。与通常的固定点的wifi探针定位方案相比,本发明可以在城市受灾害或遇突发事件时对特定区域的人员携带的移动设备进行定位,无需受制于固定点wifi探针的部署情况,为灾前监控、灾后救援提供区域人群密度数据支持。具体地,本方法利用两轮扫描,由粗略到精确给出移动设备位置。引入划分区域概念,在兼顾实际需求的同时使得定位误差保持在可接受的范围内。利用启发式算法解决最优路径规划问题,同时创新性地提出一种距离计算公式,使无人机在总时间尽可能少的情况下,尽早扫描人群密度高的区域,尽快给出重要区域的扫描结果。引入待定位设备列表,通过维护该列表实现更准确和持续的动态定位。
[0077]
上述实施方式仅为例举,不表示对本发明范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本发明技术思想的范围内作各种省略、置换、变更。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
