1.本发明涉及并网逆变器控制的技术领域,特别是涉及一种消除并网逆变器有功振荡方法的技术领域。
背景技术:
2.我国风力发电和太阳能光伏发电的发展速度位居世界首位,并且具有巨大的潜在市场。并网逆变器是新能源分布式发电系统与电网进行连接的关键设备,电网发生故障将会对并网逆变器的运行性能造成不良影响。
3.如图1所示为三相并网逆变器主电路结构;不平衡电网下,并网逆变器的数学模型可以表示为:
[0004][0005]
式中,p0和q0表示输出功率的平均值;p
c2
、p
s2
和q
c2
、q
s2
分别为输出有功和无功的二倍频振荡分量幅值。和分别为电网电压和并网电流在双同步参考坐标系下的正负序分量;易知,上式4个可控的电流量无法同时满足6个功率分量的控制要求。
[0006]
电网正常运行时,通常采用传统的正序pi控制就能对并网逆变器进行良好的控制。然而,当电网发生平衡故障时,采用这种方法的并网逆变器将出现电流畸变,有功和无功振荡等一系列问题,严重影响系统的安全可靠运行。有学者针对不对称电网下出现的电压、电流正负序分量采用双电流内环结构和pi控制器进行独立控制,在保证较好的并网电流质量的同时,维持输出功率的恒定,但这种方法需要多个pi控制器的配合,相应参数调节难度大,动态响应慢。本发明以并网逆变器输出有功功率恒定为目标,提出一种消除并网逆变器有功振荡的方法,同时本发明方法不使用锁相环,提高了并网逆变器在电网不平衡情况下的动态响应速度。
技术实现要素:
[0007]
有鉴于此,本发明的目的是提出一种消除并网逆变器有功振荡的方法,有利于提高不平衡电网情况下系统的动态响应速度,保证并网逆变器的有功功率恒定。
[0008]
本发明为了实现上述目的而采用以下技术方案实现:
[0009]
一种消除并网逆变器有功振荡的方法,包括以下步骤:
[0010]
步骤s1:建立三相三电平npc并网逆变器主电路结构;主电路包括直流母线电压v
dc
;直流侧电容c1和c2;三相三电平npc并网逆变器;滤波电感l;滤波电感电阻和线路等效
电阻的总电阻r以及电网e;
[0011]
步骤s2:建立并网逆变器可预测的离散时间模型:
[0012][0013]
式中,上标“p”为预测变量,ts为系统采样时间,i
p
(k 1)为所预测的k 1时刻的并网电流矢量;i(k)为当前k时刻的并网电流矢量;e(k)当前k时刻的电网电压矢量;v(k)为逆变器的输出电压矢量;
[0014]
步骤s3:建立新型功率表达式:
[0015][0016]
式中,e
′
表示延时1/4基波周期t后的电网电压;下标“α”和“β”分别表示相应状态量在两相静止αβ坐标系下的表达形式;
[0017]
步骤s4:通过三角函数变换,得到两相静止αβ坐标系下瞬时功率表达式为:
[0018][0019]
式中,
[0020]
其中,i
′
表示延时1/4基波周期t后的并网电流;
[0021]
步骤s5:测量当前时刻的电网电压e(k)、并网电流i(k),并将e(k)和i(k)分解到两相静止αβ坐标系;
[0022]
步骤s6:以消除有功振荡为目标,在两相静止αβ坐标系下求取并网电流参考值:
[0023][0024]
步骤s7:建立代价函数:
[0025][0026]
步骤s8:在逆变器所有可能的27种开关状态下,根据步骤s2得到的并网逆变器可预测的离散时间模型,预测k 1时刻的并网电流矢量i
p
(k 1);
[0027]
步骤s9:在每一个开关状态作用下,对代价函数f进行在线评估,选取一个使代价函数值最小的开关状态作为逆变器的最优开关状态;
[0028]
步骤s10:将最优开关状态应用于逆变器,等待下一采样时刻,返回步骤s5。
[0029]
进一步地,所述步骤s3中,基波周期t=0.02s。
[0030]
进一步地,所述步骤s7、s8、s9和s10中,将基于矢量角补偿法的模型预测控制策略应用于并网逆变器的控制。
[0031]
与现有技术相比,本发明具有以下2个突出优点:
[0032]
1、本发明通过模型预测控制策略,控制结构简单易实现,并且能够有效消除不平衡电网情况下并网逆变器出现的有功振荡。
[0033]
2、本发明方法无需锁相环电路,有效避免了复杂的锁相环参数设计,提高了不平衡电网情况下系统的动态响应速度。
附图说明
[0034]
图1为本发明的三相并网逆变器主电路结构;
[0035]
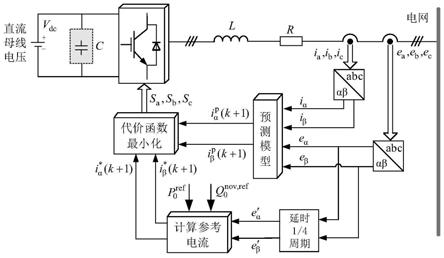
图2为本发明的并网逆变器模型预测控制框图;
[0036]
图3为本发明的方法流程图;
[0037]
图4为两种控制方法的并网电流对比图;
[0038]
图5为两种控制方法的有功功率对比图。
具体实施方式
[0039]
下面结合附图及实施例对本发明做进一步说明。图2为本发明的并网逆变器模型预测控制框图,图3为本发明的方法流程图。从图2和图3可以看出,本实施例提供了一种消除并网逆变器有功振荡的方法,具体包括以下步骤:
[0040]
步骤s1:如图1所示,建立三相三电平npc并网逆变器主电路结构;主电路参数设置如下:直流母线电压v
dc
=700v;直流侧电容c1=c2=4400μf;滤波电感l=10mh;滤波电感电阻和线路等效电阻的总电阻r=0.01ω以及电网并网逆变器采用三相三电平npc拓扑结构;
[0041]
步骤s2:建立并网逆变器可预测的离散时间模型:
[0042][0043]
式中,上标“p”为预测变量,ts为系统采样时间,i
p
(k 1)为所预测的k 1时刻的并网电流矢量;i(k)为当前k时刻的并网电流矢量;e(k)当前k时刻的电网电压矢量;v(k)为逆变器的输出电压矢量;
[0044]
步骤s3:建立新型功率表达式:
[0045][0046]
式中,e
′
表示延时1/4基波周期t后的电网电压;下标“α”和“β”分别表示相应状态量在两相静止αβ坐标系下的表达形式;
[0047]
步骤s4:通过三角函数变换,得到两相静止αβ坐标系下瞬时功率表达式为:
[0048][0049]
式中,
[0050]
其中,i
′
表示延时1/4基波周期t后的并网电流;
[0051]
步骤s5:测量当前时刻的电网电压e(k)、并网电流i(k),并将e(k)和i(k)分解到两相静止αβ坐标系;
[0052]
步骤s6:以消除有功振荡为目标,在两相静止αβ坐标系下求取并网电流参考值:
[0053]
[0054]
步骤s7:建立代价函数:
[0055][0056]
步骤s8:在逆变器所有可能的27种开关状态下,根据步骤s2得到的并网逆变器可预测的离散时间模型,预测k 1时刻的并网电流矢量i
p
(k 1);
[0057]
步骤s9:在每一个开关状态作用下,对代价函数f进行在线评估,选取一个使代价函数值最小的开关状态作为逆变器的最优开关状态;
[0058]
步骤s10:将最优开关状态应用于逆变器,等待下一采样时刻,返回步骤s5。
[0059]
在本实施例中,所述步骤s3中,基波周期t=0.02s。
[0060]
在本实施例中,所述步骤s7、s8、s9和s10中,将基于矢量角补偿法的模型预测控制策略应用于并网逆变器的控制。
[0061]
在本实施例中,设置逆变器向电网输送的有功功率参考值新型无功功率参考值为电网在t=0.21s至t=0.3s期间发生不对称跌落故障,假设故障前的电网电压幅值为1pu,故障期间电网电压跌落为:v
1
=0.6∠-45(pu)和v-1
=0.2∠ 45(pu);系统基波频率为50hz;采样频率fs=40khz。
[0062]
图4和图5分别为两种控制方法的并网电流和有功功率对比图。可以看出,采用本发明方法具有更好的动态性能,并且可以有效地消除有功振荡。
[0063]
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。