1.本发明涉及农业机械领域,尤其是谷物联合收割机技术。
背景技术:
2.粮食和油料作物是重要的战略物资,每个国家都重视粮食和油料作物的生产,农业科技不断进步使得粮食和油料作物亩产量逐渐提高,随着科技的发展机械收割几乎普及,机械收割效率较人工有着极大的提高,但目前的机械联合收割机收割过程中出现一定抛洒量,对有些特别干燥的小麦会出现高达3%~10%抛洒量,对于油料作物特别干燥情况下甚至出现高达30%的抛洒量,造成谷物巨大的浪费,之所以如此是因为目前的收割机在收割时会触碰打击到谷物使得干燥的谷物洒落,像全喂入式联合收割机割台前部拨禾轮在拨动作物倒向割台内部时会打击到谷物,使得成熟的谷物从干枯的植株上洒落,从而形成抛洒,后部的脱粒部分脱粒不干净也会形成谷物抛洒。
技术实现要素:
3.本发明在于提供一种谷物联合收割机割台不抛洒谷物的方法,该方法具有模拟人收割的方式对谷物进行收割,可以极大的减少割台部分谷物的抛洒浪费。
4.本发明通过以下技术手段得以实现:利用分禾锥尖将谷物植株分开收拢,其特征在于分禾锥尖接近地面前行时将前方的大片谷物植株分割出小块,并将其收拢;
②
利用夹握链对或者夹握带对实现对谷物的进一步收拢和静止夹握,其特征在于夹握链对或夹握带对包含收拢段和夹握段,前端驱动轮藏于分禾尖锥内部后方,前端驱动轮和压轮间为收拢段,收拢段与该装置前进方向呈斜向后,压轮和后端轮间为夹握段,夹握段与前进方向一致,夹握段在弹簧对压轮和后端轮的作用下挤压在一起,收割时夹握段与地面平行,链条或者齿带运转速度大小与该装置前进的速度相同,两条链条或者齿带转动方向相反、形成的夹握段向后运动,由于夹握段运转速度大小与该装置前进速度大小相同,方向与前进方向相反,所以夹握段相对于地面的合速度为0,从而夹握段相对于谷物植株呈静止夹住状态,仅是夹握住谷物植株,像人收割的时候一只手握住谷物植株一样;利用割刀对夹握段夹握住的谷物植株的下部进行割断,其特征在于割刀位于夹握段的下方,固定在装置机架上的割刀前进速度和装置相同,所以割刀相对于固定于大地上的谷物植株是运动的,从而割刀随着装置的前进就将夹握住不动的谷物植株下部割断,这个过程就是人收割时的用手将谷物植株收拢抓握住,然后另一只手移动割刀割断谷物植株下部;利用输送系统连接于该装置后部实现对夹握段割掉的谷物植株离开夹握段后输送到后部进行脱粒,其特征在于对于全喂入式联合收割机割台,该装置夹握段后部伸进割台内部,后端接近输送绞龙,使得割断下部的谷物植株离开夹握段后倒向绞龙;利用弹簧约束压轮、驱动轮、后端轮等支撑轮实现对谷物植株的夹握随着谷物植株
量变化的自动调整,其特征在于用弹簧约束住轮子朝某个方向可以移动,从而随着谷物植株量的不同而大小自行调整使得链条或者齿带始终保持张紧和夹握段的夹握状态;利用若干个该装置并列组成割台前端形成一定宽度的收割幅度,其特征为该装置实现一定小宽度的收割和连接后部的输送部分,将该装置并联组成一定比较大宽度的收割台前端,将收割台宽度范围内的谷物收割掉并提供后部的输送机构输送。
5.该方法具有收割时不会对谷物形成打击致使谷物洒落、结构简单等优点。
附图说明
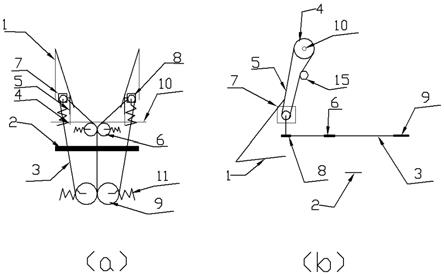
6.下面结合附图对本发明加以说明:图1表示的是发明的示意图;图2表示的是发明应用于全喂入式联合收割机割台示意图;其中,1分禾锥尖、2割刀、3夹握链对或夹握带对、4链轮、5链条、6压轮、7转轴90度变向(锥形齿轮组成的90度转动方向改变装置)、8驱动轮(链轮或者齿型带轮)、9后端轮(链轮或者齿型带轮或者压轮)、10驱动转轴、11弹簧、12挡板、13绞龙、14收割台机架、15压轮。
具体实施方式
7.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
8.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
9.实施例:如附图1至附图2所示:本实施例提供了一种谷物联合收割机割台不抛撒谷物的方法,其特征为包括分禾锥尖1、夹握链对或夹握带对3和割刀2等;分禾锥尖1,用于将谷物植株分开和初步收拢,位于最前端;夹握链对或夹握带对3,用于进一步收拢和夹握住谷物植株,最前端驱动轮8位于分禾锥尖1内部后方,压轮6和后端轮9位于分禾锥尖1斜后方,压轮6位于前端驱动轮8和后端轮9之间;割刀2,用于割断谷物植株下部,位于夹握链对或夹握带对3中压轮6和后端轮9之间的下方。
10.所述的夹握链对或夹握带对3由驱动轮8、链条或齿型带、压轮6和后端轮9等组成,夹握链对或夹握带对3包含收拢段部分和夹握段部分,前端驱动轮8和压轮6间与装置前进方向呈斜向的部分为收拢段,压轮6和后端轮9间与装置前进方向一致的部分为夹握段,两条链条或者齿型带在弹簧对压轮6等支撑轮的作用下处于自动张紧状态,并且夹握段贴合在一起;在工作时夹握段与地面平行,链条或者齿型带运转速度大小与装置前进的速度相同,并且夹握段运动方向向后。
11.该方法应用于割台时将若干个该方法中的装置并列在一起放置在割台前端,全喂
入式联合收割机割台的前端拨禾轮去掉,用若干该发明中的装置并列组合在一起替代,并且组合后端伸进割台内部接近绞龙13,通过驱动轴10将割台驱动和该装置组合运动联系起来,通过传动过程中各种传动轮大小的配比使得夹握链对或夹握带对3的转速和收割机运动速度大小相同,在该装置组合后端下方组合的各装置之间设置挡板12,可以防止绞龙13输送的时候谷物植株跑出收割台。
12.本发明工作原理为:随着割台的前进,前端的分禾尖锥1将大片谷物植株分割成小片并收拢,随着谷物植株进入夹握链对或夹握带对3的收拢段进一步收拢在一起准备进入夹握段,当进入夹握段的时候谷物植株被夹住不动,夹握段下方的割刀2割断谷物植株下部,随着割台前进被割断下部的谷物植株从夹握段脱离倒向后方的绞龙13,绞龙13将谷物植株进一步输送到后方的脱粒部分。
13.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
技术特征:
1.一种谷物联合收割机割台不抛撒谷物的方法,其特征为包括分禾锥尖(1)、夹握链对或夹握带对(3)和割刀(2)等;分禾锥尖(1),用于将谷物植株分开和初步收拢,位于最前端;夹握链对或夹握带对(3),用于进一步收拢和夹握住谷物植株,最前端驱动轮(8)位于分禾锥尖(1)内部后方,压轮(6)和后端轮(9)位于分禾锥尖(1)斜后方,压轮(6)位于前端驱动轮(8)和后端轮(9)之间;割刀(2),用于割断谷物植株下部,位于夹握链对或夹握带对(3)中压轮(6)和后端轮(9)之间的下方。2.根据权利要求1所述的一种谷物联合收割机割台不抛撒谷物的方法,其特征在于,所述的夹握链对或夹握带对(3)由驱动轮(8)、链条或齿型带、压轮(6)和后端轮(9)等组成,夹握链对或夹握带对(3)包含收拢段部分和夹握段部分,前端驱动轮(8)和压轮(6)间与发明装置前进方向呈斜向的部分为收拢段,压轮(6)和后端轮(9)间与发明装置前进方向一致的部分为夹握段,两条链条或者齿型带在弹簧对压轮(6)等支撑轮的作用下处于自动张紧状态,并且夹握段贴合在一起;在工作时夹握段与地面平行,链条或者齿型带运转速度大小与装置前进的速度相同,并且夹握段运动方向向后。
技术总结
本发明公开了一种谷物联合收割机割台不抛撒谷物的方法,属于农业机械领域,该方法可以极大的减少收割过程中割台部分的谷物抛洒。该发明包括分禾尖锥、夹握链对(或夹握带对)和割刀等。工作过程为:随着发明装置的前进,分禾锥尖将前方的谷物植株分割成小块并收拢起来,后方的夹握链对(或夹握带对)进一步将谷物植株收拢在一起并静止夹握住,夹握链对(或夹握带对)下方的割刀在谷物植株被静止夹握住后将其下部割断,夹握链对(或夹握带对)后端置于收割台内部并靠近或者连接输送系统,使得被割断根部的谷物植株从夹握链对(或夹握带对)中离开后被输送到后方的脱粒部分脱粒。开后被输送到后方的脱粒部分脱粒。开后被输送到后方的脱粒部分脱粒。
技术研发人员:常防震
受保护的技术使用者:常防震
技术研发日:2020.09.03
技术公布日:2022/3/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。