一种面向无人机daa的航迹融合方法
技术领域
1.本发明涉及无人机daa技术领域,具体而言,涉及一种面向无人机daa的航迹融合方法。
背景技术:
2.近年来,无人机系统(unmanned aircraft system,uas)得到了飞速发展和广泛应用:在军事方面,无人机承担越来越多的侦查、打击等任务;在民用方面,无人机在遥感测绘、地质勘测、灾害救援等方面具有广泛的应用。
3.无人机产业飞速发展,数量急剧增加,由于缺乏必要的探测与避让(detect and avoid,daa)设备,给无人机自身及空域内其他飞机造成了极大地威胁,针对上述问题,国内外研究机构进行了大量的研究、测试,目前rtca组织发布了do-365标准,按照该标准,无人机daa系统的避让处理工作过程如下:
4.a)目标探测:通过空空雷达(atar)、主动监视(ast)、自动相关监视(ads-b)传感器探测空域内飞机(简称“入侵机”);
5.b)航迹融合:通过航迹融合算法将atar、ast、ads-b传感器数据融合,生成可靠全局航迹;
6.c)告警及引导处理:依据全局航迹进行告警计算、必要时给出引导信息。
7.航迹融合需要针对传感器的特性及自身应用场景,采取合适的算法,以最小的计算量达到较好的使用效果。
8.目前尚无成熟的针对atar、ast、ads-b传感器的航迹融合算法,目前的航迹融合算法存在如下问题:
9.a)航迹融合依赖的传感器多是一次雷达,且多为同构传感器,应用场景以地面监视为主。
10.b)航迹融合中较少涉及合作传感器(ast,ads-b),没有充分利用合作传感器的信息。
技术实现要素:
11.本发明旨在提供一种面向无人机daa的航迹融合方法,以解决上述无人机daa系统的避让处理工作过程中航迹融合存在的问题。
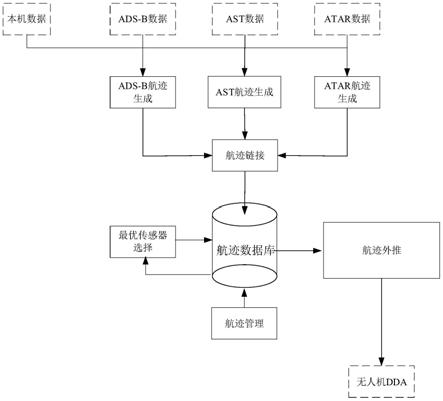
12.本发明提供的一种面向无人机daa的航迹融合方法,包括如下步骤:
13.s10,从各种传感器接收传感器数据;
14.s20,根据接收的传感器数据为每个传感器的每个目标建立航迹;
15.s30,识别和链接来自不同传感器的同一目标的航迹;
16.s40,在链接的航迹中找到最佳航迹;
17.s50,根据最佳航迹进行航迹外推;
18.s60,完成航迹外推后将最终航迹发送到无人机daa设备。
19.进一步的,步骤s10中所述各种传感器包括:
20.空对空雷达atar;
21.主动监视系统ast;
22.以及,自动相关监视系统ads-b。
23.进一步的,步骤s20中,为接收的空对空雷达atar数据的每个目标建立航迹的方法包括:
24.s211,根据本机数据和空对空雷达atar数据计算当前目标位置;
25.s212,航迹数据库中存储初始化航迹和建立的航迹,检测航迹数据库中是否有航迹外推位置与当前目标位置匹配:
26.(1)若航迹数据库中没有航迹外推位置与当前目标位置匹配,则根据空对空雷达atar数据初始化航迹;
27.(2)若航迹数据库中有初始化航迹外推位置与当前目标位置匹配,则在初始化航迹的基础上建立航迹;
28.(3)若航迹数据库中有建立的航迹外推位置与当前目标位置匹配,则根据通过对空对空雷达atar数据进行卡尔曼滤波的方式更新建立的航迹。
29.进一步的,所述空对空雷达atar数据表示为斜距、方位角、俯仰角,记为(ρ,β,ε),所述根据通过对空对空雷达atar数据进行卡尔曼滤波的方式更新建立的航迹的方法为:
30.(a)根据第k次的航迹外推位置通过enu预测逻辑预测第k 1次的航迹外推位置预测值
31.(b)将第k 1次的航迹外推位置预测值进行enu坐标到ρβε坐标的坐标转换,得到
32.(c)计算空对空雷达atar数据中斜距、方位角、俯仰角与的残差;
33.(d)对残差和增益k(k 1)进行ρβε坐标到enu坐标的坐标转换;
34.(e)采用第k 1次的航迹外推位置预测值以及坐标转换后的残差和增益k(k 1),计算第k 1次的航迹外推位置
35.(f)将第k 1次的航迹外推位置结合本机数据中的经度、纬度、高度,计算当前目标的绝对经度、纬度、高度。
36.进一步的,步骤s20中,为接收的主动监视系统ast数据的每个目标建立航迹的方法包括:
37.s221,根据本机数据和主动监视系统ast数据计算当前目标位置;
38.s222,航迹数据库中存储初始化航迹和建立的航迹,检测航迹数据库中是否有航迹外推位置与当前目标位置匹配:
39.(1)若航迹数据库中没有航迹外推位置与当前目标位置匹配,则根据主动监视系统ast数据初始化航迹;
40.(2)若航迹数据库中有初始化航迹外推位置与当前目标位置匹配,则在初始化航迹的基础上建立航迹;
41.(3)若航迹数据库中有建立的航迹外推位置与当前目标位置匹配,则根据通过对主动监视系统ast数据进行卡尔曼滤波的方式更新建立的航迹。
42.进一步的,所述主动监视系统ast数据表示为斜距、方位角、高度报告值,记为(ρ,β,h),所述根据通过对主动监视系统ast数据进行卡尔曼滤波的方式更新建立的航迹的方法为:
43.(a)根据第k次的航迹外推位置通过enu预测逻辑预测第k 1次的航迹外推位置预测值
44.(b)将第k 1次的航迹外推位置预测值进行enu坐标到斜距方位坐标的坐标转换;
45.(c)计算主动监视系统ast数据中斜距和方位与坐标转换后的第k 1次的航迹外推位置预测值的残差一;
46.(d)对残差一和增益k(k 1)进行斜距方位坐标到enu坐标的坐标转换;
47.(e)采用第k 1次的航迹外推位置预测值以及坐标转换后的残差一和增益k(k 1),计算第k 1次的航迹外推位置中的en值;
48.(f)计算主动监视系统ast数据中高度报告值与第k 1次的航迹外推位置预测值的残差二;
49.(g)采用第k 1次的航迹外推位置预测值以及残差二和增益k(k 1),计算第k 1次的航迹外推位置中的高度值;
50.(h)由第k 1次的航迹外推位置中的en值和高度值得到第k 1次的航迹外推位置将第k 1次的航迹外推位置结合本机数据中的经度、纬度、高度,计算当前目标的绝对经度、纬度、高度。
51.进一步的,设[e
s n
s us]
′
为局部航迹在enu坐标系中的外推位置,[e n u]
′
为全局航迹在enu坐标系中的外推位置;[ρ
s β
s εs]
′
为局部航迹在球坐标系的外推位置;[ρ β ε]
′
为全局航迹在球坐标系的外推位置;其中,局部航迹是指链接前的航迹,全局航迹是指链接后的航迹;则步骤s30包括如下子步骤:
[0052]
s31,读入一条局部航迹i;
[0053]
s32,读入一条全局航迹j;
[0054]
s33,计算航迹连接的参数δs、δz、δρ、δβ、δε:
[0055]
(1)局部航迹i与全局航迹j的横向位置差异:其中:
[0056]
δx=|e-es|;
[0057]
δy=|n-ns|;
[0058]
(2)局部航迹i与全局航迹j的垂直位置差异:δz=|u-us|;
[0059]
(3)局部航迹i与全局航迹j的斜距差:δρ=|ρ-ρs|;
[0060]
(4)局部航迹i与全局航迹j的方位角差:δβ=|β-βs|;
[0061]
(5)局部航迹i与全局航迹j的俯仰角差:δε=|ε-εs|;
[0062]
s34,根据步骤s33计算的航迹连接的参数,判断局部航迹i与全局航迹j是否满足链接条件,满足进入s35,否则终止;
[0063]
s35,判断局部航迹i与全局航迹j的icao地址是否匹配,若匹配则直接链接局部航迹i与全局航迹j,否则进入步骤s36;
[0064]
s36,判断局部航迹i与全局航迹j的二次应答a代码是否匹配,若匹配则直接链接局部航迹i与全局航迹j,否则进入步骤s37;
[0065]
s37,重复s32~s36,在尚未链接的全局航迹中选择δs最小的全局航迹进行链接。
[0066]
进一步的,步骤s40中在链接的航迹中找到最佳航迹的方法为:
[0067]
s41,分别在水平方向和垂直方向找到最佳传感器:
[0068]
(1)对于垂直方向的最佳传感器:
[0069]
先判断是否为合作传感器:合作传感器的优选于非合作传感器;其中,合作传感器是指主动监视系统ast和自动相关监视系统ads-b;非合作传感器是指空对空雷达atar;
[0070]
若都为合作传感器,则再判断合作传感器的垂直速率不确定性,垂直速率不确定性最小的为最优传感器;
[0071]
(2)对于水平方向的最佳传感器,计算各个传感器的水平位置不确定性选择水平位置不确定性最小的传感器为最佳传感器;
[0072][0073][0074][0075]
其中,σ
east
为传感器东方向位置不确定度;σ
v,east
为传感器东方向速度不确定度;σ
north
为传感器北方向位置不确定度;σ
north
为传感器北方向速度不确定度;t为航迹计算间隔;
[0076]
s42,由最佳传感器产生的航迹即为最佳航迹。
[0077]
作为优选,需要采用主动监视系统ast数据及空对空雷达atar数据来验证自动相关监视系统ads-b数据的有效性。
[0078]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0079]
1、本发明充分考虑并发挥了atar、ast、ads-b各传感器的优势来进行航迹融合,并且充分利用了合作传感器的信息。
[0080]
2、本发明能够将atar、ast、ads-b三种传感器的航迹数据统一至经度、纬度、高度模式下,便于后续航迹融合处理。
[0081]
3、本发明针对主动监视系统ast测角性能较差的问题,采用了水平和垂直卡尔曼滤波结合的方式提升航迹滤波性能。
[0082]
4、本发明在航迹链接时,充分利用ast、ads-b提供的icao地址、二次a代码,提升航迹链接效率与质量。
[0083]
5、本发明引入了最佳传感器,在一定时间内只采用最优传感器更新全局航迹,减少计算量。
[0084]
6、本发明采用atar、ast数据对ads-b数据进行校验,能够有效滤除虚假目标。
附图说明
[0085]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例中的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
[0086]
图1为本发明实施例的面向无人机daa的航迹融合方法的流程图。
[0087]
图2为本发明实施例的空对空雷达atar数据建立航迹的流程图。
[0088]
图3为本发明实施例的空对空雷达atar数据建立航迹中卡尔曼滤波流程图。
[0089]
图4为为本发明实施例的主动监视系统ast数据建立航迹中卡尔曼滤波流程图。
[0090]
图5为本发明实施例的航迹链接的流程图。
具体实施方式
[0091]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0092]
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0093]
实施例
[0094]
如图1所示,本实施例提出一种面向无人机daa的航迹融合方法,包括如下步骤:
[0095]
s10,从各种传感器接收传感器数据;其中,所述各种传感器包括:
[0096]
空对空雷达atar;
[0097]
主动监视系统ast;
[0098]
以及,自动相关监视系统ads-b。
[0099]
s20,根据接收的传感器数据为每个传感器的每个目标建立航迹;
[0100]
1、空对空雷达atar
[0101]
如图2所示,为接收的空对空雷达atar数据的每个目标建立航迹的方法包括:
[0102]
s211,根据本机数据和空对空雷达atar数据计算当前目标位置;
[0103]
s212,航迹数据库中存储初始化航迹和建立的航迹,检测航迹数据库中是否有航迹外推位置与当前目标位置匹配:
[0104]
(1)若航迹数据库中没有航迹外推位置与当前目标位置匹配,则根据空对空雷达atar数据初始化航迹;
[0105]
(2)若航迹数据库中有初始化航迹外推位置与当前目标位置匹配,则在初始化航迹的基础上建立航迹;
[0106]
(3)若航迹数据库中有建立的航迹外推位置与当前目标位置匹配,则根据通过对空对空雷达atar数据进行卡尔曼滤波的方式更新建立的航迹。其中,所述空对空雷达atar数据表示为斜距、方位角、俯仰角,记为(ρ,β,ε),如图3所示,所述根据通过对空对空雷达
atar数据进行卡尔曼滤波的方式更新建立的航迹的方法为:
[0107]
(a)根据第k次的航迹外推位置通过enu预测逻辑预测第k 1次的航迹外推位置预测值
[0108]
(b)将第k 1次的航迹外推位置预测值进行enu坐标到ρβε坐标的坐标转换,得到
[0109]
(c)计算空对空雷达atar数据中斜距、方位角、俯仰角与的残差;
[0110]
(d)对残差和增益k(k 1)进行ρβε坐标到enu坐标的坐标转换;
[0111]
(e)采用第k 1次的航迹外推位置预测值以及坐标转换后的残差和增益k(k 1),计算第k 1次的航迹外推位置
[0112]
(f)将第k 1次的航迹外推位置结合本机数据中的经度、纬度、高度,计算当前目标的绝对经度、纬度、高度(φ,λ,h)。
[0113]
2、主动监视系统ast
[0114]
与空对空雷达atar类似,可以参照图2,为接收的主动监视系统ast数据的每个目标建立航迹的方法包括:
[0115]
s221,根据本机数据和主动监视系统ast数据计算当前目标位置;
[0116]
s222,航迹数据库中存储初始化航迹和建立的航迹,检测航迹数据库中是否有航迹外推位置与当前目标位置匹配:
[0117]
(1)若航迹数据库中没有航迹外推位置与当前目标位置匹配,则根据主动监视系统ast数据初始化航迹;
[0118]
(2)若航迹数据库中有初始化航迹外推位置与当前目标位置匹配,则在初始化航迹的基础上建立航迹;
[0119]
(3)若航迹数据库中有建立的航迹外推位置与当前目标位置匹配,则根据通过对主动监视系统ast数据进行卡尔曼滤波的方式更新建立的航迹。其中,由于主动监视系统ast的目标测量特性与空对空雷达atar有差异(采用应答机的高度报告值h代替了空对空雷达atar中的俯仰角ε),因此需要对卡尔曼滤波算法需做适当调整,距离方位(ρ、β)采用扩展卡尔曼滤波,高度采用卡尔曼滤波,最后将高度及e(east)n(north)值合并转换输出经度、纬度、高度。因此,如图4所示,所述主动监视系统ast数据表示为斜距、方位角、高度报告值,记为(ρ,β,h),所述根据通过对主动监视系统ast数据进行卡尔曼滤波的方式更新建立的航迹的方法为:
[0120]
(a)根据第k次的航迹外推位置通过enu预测逻辑预测第k 1次的航迹外推位置预测值
[0121]
(b)将第k 1次的航迹外推位置预测值进行enu坐标到斜距方位坐标的坐标转换;
[0122]
(c)计算主动监视系统ast数据中斜距和方位与坐标转换后的第k 1次的航迹外推位置预测值的残差一;
[0123]
(d)对残差一和增益k(k 1)进行斜距方位坐标到enu坐标的坐标转换;
[0124]
(e)采用第k 1次的航迹外推位置预测值以及坐标转换后的残差一和增益k(k 1),计算第k 1次的航迹外推位置中的en值;
[0125]
(f)计算主动监视系统ast数据中高度报告值与第k 1次的航迹外推位置预测值的残差二;
[0126]
(g)采用第k 1次的航迹外推位置预测值以及残差二和增益k(k 1),计算第k 1次的航迹外推位置中的高度值;
[0127]
(h)由第k 1次的航迹外推位置中的en值和高度值得到第k 1次的航迹外推位置将第k 1次的航迹外推位置结合本机数据中的经度、纬度、高度,计算当前目标的绝对经度、纬度、高度(φ,λ,h)。
[0128]
3、自动相关监视系统ads-b
[0129]
自动相关监视系统ads-b数据提供完整的航迹数据(如位置、速度和其他运动参数)。因此,自动相关监视系统ads-b数据可以由无人机daa设备中的dda算法直接使用。
[0130]
但是由于部分自动相关监视系统ads-b不能提供定位精度的问题。自动相关监视系统ads-b数据可能被欺骗,产生虚假和误导性的跟踪信息被发送到无人机daa设备进行警报和引导功能。因此,无人机daa需要对自动相关监视系统ads-b数据进行额外验证。本实施例采用主动监视系统ast数据及空对空雷达atar数据来验证自动相关监视系统ads-b数据的有效性,验证要求如下:
[0131]
采用主动监视系统ast数据来验证自动相关监视系统ads-b数据的验证要求包括:
[0132]
a)斜距差:<0.25nm;
[0133]
b)方位差:<45
°
;
[0134]
c)高度告:<200ft。
[0135]
采用空对空雷达atar数据来验证自动相关监视系统ads-b数据的验证要求包括:(空对空雷达atar有更高的方位测量精度,但高度测量性能略差):
[0136]
a)斜距差:<0.25nm;
[0137]
b)方位差:<15
°
;
[0138]
c)高度告:<500ft。
[0139]
一般地,无人机dda设备会设定一个周期(例如每10秒)对ads-b数据的有效性进行验证。
[0140]
通过步骤s20,能够将三种传感器的航迹数据统一至经度、纬度、高度模式下,便于后续处理。
[0141]
s30,识别和链接来自不同传感器的同一目标的航迹;
[0142]
航迹链接主要是将来自不同传感器(ads-b、atar、ast)的同一目标的局部航迹链接为全局航迹。航迹连接依赖于以下参数:
[0143]
(1)icao地址,即24位国际民用航空组织地址;
[0144]
(2)二次应答a代码;
[0145]
(3)位置关联。
[0146]
由此,设[e
s n
s us]
′
为局部航迹在enu坐标系中的外推位置,[e n u]
′
为全局航迹在enu坐标系中的外推位置;[ρ
s β
s εs]
′
为局部航迹在球坐标系的外推位置;[ρ β ε]
′
为全
局航迹在球坐标系的外推位置;其中,局部航迹是指链接前的航迹,全局航迹是指链接后的航迹;如图5所示,步骤s30包括如下子步骤:
[0147]
s31,读入一条局部航迹i;
[0148]
s32,读入一条全局航迹j;
[0149]
s33,计算航迹连接的参数δs、δz、δρ、δβ、δε:
[0150]
(1)局部航迹i与全局航迹j的横向位置差异:其中:
[0151]
δx=|e-es|;
[0152]
δy=|n-ns|;
[0153]
(2)局部航迹i与全局航迹j的垂直位置差异:δz=|u-us|;
[0154]
(3)局部航迹i与全局航迹j的斜距差:δρ=|ρ-ρs|;
[0155]
(4)局部航迹i与全局航迹j的方位角差:δβ=|β-βs|;
[0156]
(5)局部航迹i与全局航迹j的俯仰角差:δε=|ε-εs|;
[0157]
s34,根据步骤s33计算的航迹连接的参数,判断局部航迹i与全局航迹j是否满足链接条件,满足进入s35,否则终止;其中链接条件是指参数δz、δρ、δβ、δε的分别是否在预设范围内,例如:
[0158]
δρ《0.25nm;
[0159]
δε《2.5
°
或δz《250
′
;
[0160]
δβ《45
°
;
[0161]
s35,判断局部航迹i与全局航迹j的icao地址是否匹配,若匹配则直接链接局部航迹i与全局航迹j,否则进入步骤s36;
[0162]
s36,判断局部航迹i与全局航迹j的二次应答a代码是否匹配,若匹配则直接链接局部航迹i与全局航迹j,否则进入步骤s37;
[0163]
s37,重复s32~s36,在尚未链接的全局航迹中选择δs最小的全局航迹进行链接。
[0164]
s40,在链接的航迹中找到最佳航迹;
[0165]
航迹一旦链接,全局航迹执行一个最优传感器的选择器,水平和垂直最优传感器是独立估计,则步骤s40中在链接的航迹中找到最佳航迹的方法为:
[0166]
s41,分别在水平方向和垂直方向找到最佳传感器:
[0167]
(1)对于垂直方向的最佳传感器:
[0168]
先判断是否为合作传感器:合作传感器的优选于非合作传感器;其中,合作传感器是指主动监视系统ast和自动相关监视系统ads-b;非合作传感器是指空对空雷达atar;
[0169]
若都为合作传感器,则再判断合作传感器的垂直速率不确定性,垂直速率不确定性最小的为最优传感器;
[0170]
(2)对于水平方向的最佳传感器,计算各个传感器的水平位置不确定性选择水平位置不确定性最小的传感器为最佳传感器;
[0171]
[0172][0173][0174]
其中,σ
east
为传感器东方向位置不确定度;σ
v,east
为传感器东方向速度不确定度;σ
north
为传感器北方向位置不确定度;σ
north
为传感器北方向速度不确定度;t为航迹计算间隔;
[0175]
s42,由最佳传感器产生的航迹即为最佳航迹。为了避免一直切换最优传感器,仅当备用传感器(即除了最优传感器外的其他传感器)航迹在一定时间(根据需要预设,如至少2.5秒)内具有更好的不确定性。
[0176]
s50,根据最佳航迹进行航迹外推;即可以通过最佳航迹估计水平速度和垂直速度,并按照估计的水平速度和垂直速度进行航迹外推,该航迹外推方法为现有技术,在此不再赘述。
[0177]
s60,完成航迹外推后将最终航迹发送到无人机daa设备,无人机daa设备能够根据融合后的最终航迹进行告警计算、必要时给出引导信息。
[0178]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
