空间机动目标isar成像方法、装置、设备及存储介质
技术领域
1.本发明涉及isar成像技术领域,尤其涉及一种空间机动目标isar成像方法、装置、设备及存储介质。
背景技术:
2.逆合成孔径雷达(inverse synthetic aperture radar,isar)主要通过固定/相对固定的天线实现对空间/海面等机动目标的进行全天候、全天时探测和成像,在国家安全,战略攻防,探测预警等领域具有重要意义,也受到了世界各国广泛关注。目前,空间环境日趋复杂,大/复杂机动目标日益增多,给准确获取机动目标高分辨图像带来严峻挑战。针对机动性差的匀速旋转目标,传统距离-多普勒(range-doppler,rd)成像方法可得到较为理想的目标图像,但是对于机动性强的目标,由于转动的非均匀特征,使得目标散射点方位向的多普勒频率具有非线性时变特征,传统的成像算法失效,因此需要进一步研究适用于复杂机动目标的isar成像方法。
3.近年来,国内外学者提出多种isar成像算法,这些方法可分两大类。第一类非参数化方法,该类方法主要通过引入高分辨时频分析技术代替传统距离-多普勒方法的方位向傅立叶变换,获取观测目标isar图像,包括短时傅里叶变换(short time fourier transform,stft),小波变换(wavelet transform,wt),维纳格变换(wigner-ville distribution,wvd),平滑维纳格变换(smoothed pseudo wigner-ville distribution,spwvd),l类的多项式维纳格变换等方法,但是这类方法受时频分析技术本身的线性变换和非线性变换影响较大,而且选择此类方法时需要在分辨率和交叉相抑制之间做出权衡,限制了此类方法的适用性。第二类参数化方法,该类方法将经过平动补偿的各距离单元信号建模为线性调频或立方相位信号,然后利用参数估计的方法估计信号的相关参数实现isar成像。主要包括高阶模糊函数(high-order ambiguity function,haf),乘积高阶相位函数(product high-order matched phase transform,phpf),立方相位函数(cubic phase function,cpf),广义立方相位函数(generalized cpf,gcpf),频率-二次调频率分布(chirp rate quadratic chirp rate distribution,crqcrd),乘积gcpf(product generalized cpf,pgcpf),积累参量立方相位函数(integrated parametric cpf,ipcpf),相干积分平滑gcpf(coherent integrated smoothed gcpf,cisgcpf)。尽管这类方法可以获得较好的isar成像结果,但是由于需要遍历目标存在的所有距离单元,估计目标所有散射点的相关参数,具有很高的计算复杂度,几乎不适合实时处理。
技术实现要素:
4.基于此,有必要针对上述技术问题,提供一种空间机动目标isar成像方法、装置、设备及存储介质。
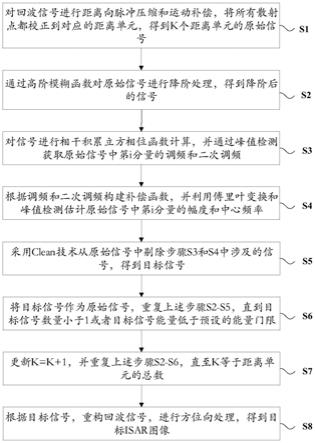
5.一种空间机动目标isar成像方法,所述方法包括:s1对回波信号进行距离向脉冲压缩和运动补偿,将所有散射点都校正到对应的距离单元,得到k个距离单元的原始信号;
s2通过高阶模糊函数对所述原始信号进行降阶处理,得到降阶后的信号;s3对所述信号进行相干积累立方相位函数计算,并通过峰值检测获取所述原始信号中第i分量的调频和二次调频系数;s4根据所述调频和二次调频系数构建补偿函数,并利用傅里叶变换和峰值检测估计所述原始信号中第i分量的幅度和中心频率;s5采用clean技术从原始信号中剔除步骤s3和s4中涉及的信号分量,得到目标信号;s6将所述目标信号作为新的原始信号,重复上述步骤s2-s5,直到目标信号数量小于1或者目标信号能量低于预设的能量门限;s7更新k=k 1,并重复上述步骤s2-s6,直至所述k等于所述距离单元的总数;s8根据所述目标信号,重构回波信号,进行方位向处理,得到目标isar图像。
6.在其中一个实施例中,所述步骤s1之前,还包括:获取回波信号数据。
7.在其中一个实施例中,所述原始信号为多成分的立方相位信号,且所述原始信号的参数包括调频、二次调频、幅度和中心频率。
8.在其中一个实施例中,所述步骤s2,具体为:采用高阶模糊函数对所述立方相位信号的信号进行降幂,得到lfm信号。
9.在其中一个实施例中,所述步骤s3,具体为:采用相干积累立方相位函数估计所述lfm信号的频率和调频率;基于峰值检测,分析lfm信号和立方相位信号之间的对应关系,并估计所述立方相位信号的调频和二次调频。
10.一种空间机动目标isar成像装置,包括原始信号获取模块、信号降阶模块、参数估计模块、信号剔除模块、信号判断模块、k值判断模块和isar成像模块,其中:所述原始信号获取模块用于,对回波信号进行距离向脉冲压缩和运动补偿,将所有散射点都校正到对应的距离单元,得到k个距离单元的原始信号;所述信号降阶模块用于,通过高阶模糊函数对所述原始信号进行降阶处理,得到降阶后的信号;所述参数估计模块用于,对所述信号进行相干积累立方相位函数计算,并通过峰值检测获取所述原始信号中第i分量的调频和二次调频;所述参数估计模块还用于,根据所述调频和二次调频构建补偿函数,并利用傅里叶变换和峰值检测估计所述原始信号中第i分量的幅度和中心频率;所述信号剔除模块用于,采用clean技术从原始信号中剔除步骤s3和s4中涉及的信号分量,得到目标信号;所述信号判断模块用于,将所述目标信号作为新的原始信号,重复上述步骤s2-s5,直到目标信号数量小于1或者目标信号能量低于预设的能量门限;所述k值判断模块用于,更新k=k 1,并重复上述步骤s2-s6,直至所述k等于所述距离单元的总数;所述isar成像模块用于,根据所述目标信号,重构回波信号,进行方位向处理,得到目标isar图像。
11.一种设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述各个实施例中所述的空间机动目标isar成像方法的步骤。
12.一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述各个实施例中所述的空间机动目标isar成像方法的步骤。
13.上述空间机动目标isar成像方法、装置、设备及存储介质,通过将回波信号完成脉冲压缩和运动补偿,得到原始信号,接着利用高阶模糊函数对原始信号降阶,并利用相干积累立方相位函数实现参数估计,重构原始信号实现isar成像。该方案能够同时估计原始信号的二阶和三阶参数,具有较高的运算效率,降低了计算复杂度;同时通过增加了自项能量,降低了信噪比门限,提高了低信噪比下参数估计的鲁棒性。
附图说明
14.图1为一个实施例中空间机动目标isar成像方法的流程示意图;
15.图2为一个实施例中空间机动目标isar成像的几何模型图;
16.图3为一个实施例中不同信噪比下提出的参数估计方法性能对比(a)5db(b)-5db;
17.图4为一个实施例中空间机动目标散射体的模型图;
18.图5为一个实施例中不同信噪比下rd方法isar成像结果(a)5db(b)-5db;
19.图6为一个实施例中不同信噪比下cisgcpf-cicpf方法isar成像结果(a)5db(b)-5db;
20.图7为一个实施例中不同信噪比下提出方法isar成像结果(a)5db(b)-5db;
21.图8为一个实施例中空间机动目标isar成像装置的结构框图;
22.图9是一个实施例中设备的内部结构图。
具体实施方式
23.为了使本发明的目的、技术方案及优点更加清楚明白,下面通过具体实施方式结合附图对本发明做进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
24.在一个实施例中,如图1所示,提供了一种空间机动目标isar成像方法,包括以下步骤:
25.s1对回波信号进行距离向脉冲压缩和运动补偿,将所有散射点都校正到对应的距离单元,得到k个距离单元的原始信号。
26.在一个实施例中,步骤s1之前,还包括:获取回波信号数据。
27.在一个实施例中,步骤s1中的原始信号为多成分的立方相位信号,且原始信号的参数包括调频、二次调频、幅度和中心频率。
28.具体地,空间机动目标isar成像几何模型如图2所示,以目标旋转中心o为坐标原点,xyz为坐标轴建立笛卡尔坐标系,p(x
p
,y
p
,z
p
)为目标上任意一散射点,向量r与雷达视线方向平行,向量ω为目标的等效角速度,根据向量分解法则,ω可以分解为平行于r的向量ωr和垂直于r的向量ωe。通过分析并结合已知信息可知,向量ωe主要贡献是在雷达与目标之间产生多普勒频率变化,对成像是有利的,能够带来方位向高分辨率,也是获取isar图像的关键因素。
29.对于空间机动目标的任意一散射点p,对应的线速度和线速度径向分量可分别表示为r
p
×
ωe和(r
p
×
ωe)
·
r,其中
×
和
·
为外积和内积。假设平动补偿已完成,则散射点p对应的多普勒频率可写为
[0030][0031]
其中,λ为发射信号波长.设w
x
,wy,wz分别为向量ωe在坐标轴xyz上的投影。对于空间机动目标,在不同方向的转动分量均具有时变特征,w
x
,wy,wz可分别表示为:
[0032][0033]
其中,tm代表方位慢时间,w
x1
,w
x2
,w
x3
;ω
y1
,w
y2
,w
y3
;w
z1
,w
z2
,w
z3
分别表征w
x
;wy;wz的常数项、一次项和二次项。同时ω1=w
x1
,w
y1
,w
z1
,ω2=w
x2
,w
y2
,w
z2
,ω3=ω
x3
,ω
y3
,ω
z3
。在实际isar成像过程中,相干积累时间较短(2-3s),可认为投影平面保持不变。因此,目标散射点运动的多普勒频率可进一步表示为
[0034][0035]
其中,r
x
,ry,rz分别表示向量r在笛卡尔坐标系中沿不同坐标轴xyz的投影。令向量k=(y
prz-z
pry
),(z
prx-x
prz
),(x
p
rx-y
prz
),则散射点p转动所引起的距离变化量为
[0036][0037]
雷达天线接收的有效回波经过脉冲压缩,可表示形式为:
[0038][0039]
其中,b为发射信号带宽。为方便分析,经过理想运动补偿后,某个距离单元的回波信号可重写为
[0040][0041]
其中,m表示该距离单元内的散射点总数,ai、分别表示第i个散射点的幅度、中心频率、调频率和二次调频率,此信号表现为多成分立方相位信号。
[0042]
s2通过高阶模糊函数对原始信号进行降阶处理,得到降阶后的信号。
[0043]
在一个实施例中,步骤s2具体为:采用高阶模糊函数对立方相位信号的信号进行降幂,得到线性调频(linear frequency modulation,lfm)信号。
[0044]
s3对信号进行相干积累立方相位函数计算,并通过峰值检测获取原始信号中第i分量的调频和二次调频系数。
[0045]
在一个实施例中,步骤s3具体为:采用相干积累立方相位函数估计所述lfm信号的频率和调频率;基于峰值检测,分析lfm信号和立方相位信号之间的对应关系,并估计立方相位信号的调频和二次调频。
[0046]
具体地,第i分量即为上述说明中的第i个散射点;根据步骤s1中对isar成像几何和信号模型的分析可知,单个距离单元信号如公式(6)所示,该信号为立方相位信号,通过充分挖掘信号的二次调频特征,可首先利用高阶模糊函数将立方相位信号的信号进行降幂,经立方相位信号变换为lfm信号,再利用相干积累立方相位函数估计lfm的频率和调频
transform,fft)峰值检测实现。
[0058][0059]
为了验证提出高阶模糊函数-相干积累立方相位函数(high-order ambiguity function-coherent integrated cubic phase function,haf-cicpf)方法在噪声环境下参数估计性能的鲁棒性,这里对两分量cps信号进行分析,并分别添加5db和-5db的复杂加性白高斯噪声进行对比分析。图3(a)和图3(b)分别给出了不同信噪比下高阶模糊函数-立方相位函数(high-order ambiguity function-cubic phase function,haf-cpf)、高阶模糊函数-乘积立方相位函数(high-order ambiguity function-product cubic phase function,haf-pcpf)、高阶模糊函数-积分立方相位函数(high-order ambiguity function-integrated cubic phase function,haf-icpf)和haf-cicpf方法的比较结果。在较高snr情况下,haf-pcpf、haf-icpf和haf-cicpf都具有一定的抑制交叉项和虚假峰的能力,如图3(a)所示。但是在较低snr的情况下,haf-cpf,haf-pcpf和haf-icpf性能急剧恶化,不具有稳定的参数估计性能,而haf-cicpf可以有效抑制杂波并具有明显峰值,具有较好的参数估计性能,如图3(b)所示。验证了提出方法的有效性。
[0060]
s4根据调频和二次调频系数构建补偿函数,并利用傅里叶变换和峰值检测估计原始信号中第i分量的幅度和中心频率。
[0061]
具体地,利用估计的调频和二次调频参数构造补偿函数,然后利用fft(傅里叶变换)和峰值检测估计信号的幅度和中心频率参数。
[0062]
s5采用clean技术从原始信号中剔除步骤s3和s4中涉及的信号分量,得到目标信号。
[0063]
具体地,结合洁净(clean)技术从原始信号s(ta)中剔除已经估计出的信号,有
[0064][0065]
s6将目标信号作为新的原始信号,重复上述步骤s2-s5,直到目标信号数量小于1或者目标信号能量低于预设的能量门限。
[0066]
具体地,将目标信号作为新的原始信号,重复上述步骤s2到步骤s5,直到当前所在距离单元剩余信号数量小于1或者剩余信号能量低于预设的能量门限t
threshold
。
[0067]
s7更新k=k 1,并重复上述步骤s2-s6,直至k等于所述距离单元的总数。
[0068]
具体地,更新k=k 1,跳至下一个距离单元,直到k等于距离单元总数m。
[0069]
s8根据目标信号,重构回波信号,进行方位向处理,得到目标isar图像。
[0070]
具体地,根据上述的目标信号,重构回波信号,进行方位向处理,得到目标isar图像。
[0071]
在一个实施例中,对本方案的计算复杂度进行分析,并与现有方法进行对比,通常,n点fft或ifft(快速傅里叶变换)需要o(nlog2n)次浮点运算。假设原始回波数据总共有nr个距离单元,且在kth距离单元散射点的个数为qi;信号时间变量ta长度为na,延迟时间变量τa长度为n
τ
。
[0072]
因此,根据图1的空间机动目标isar成像方法的流程示意图可知,提出的方法主要
运算量主要体现在利用高阶模糊函数-相干积累三次相位函数进行参数估计,该计算复杂度为o(n
a2
n
τ
na nalog2na),因此,本文提出方法的计算复杂度大约为:
[0073][0074]
现有的相干积累平滑立方相位函数-相干积累立方相位函数(coherent integrated smoothed gcpf-coherent integrated cpf,cisgcpf-cicpf)联合方法的计算复杂度主要体现在cicpf(相干积累立方相位函数)和cisgcpf(相干积累平滑立方相位函数)进行参数估计,cicpf的计算复杂度为o(n
τ
na nalog2na),cisgcpf的计算复杂度为o(n
τ2
na nalog2na),因此cisgcpf-cicpf方法的计算复杂度为:
[0075][0076]
从式(14)和(15)可知,现有的cisgcpf-cicpf方法,由于需要使用分别采用cisgcpf和cicpf操作估计二次和三次系数,具有较高的计算复杂度。而本文提出的isar成像方法能够一次完成二次和三次系数的估计,降低了运算过程的复杂程度;因此,其计算复杂度低于现有方法。
[0077]
在一个实施例中,对本方案的isar成像进行仿真验证,将提出的方法应用到空间机动目标isar成像中,并与现有的距离多普勒(range-doppler,rd)方法,和cisgcpf-cicpf方法进行对比分析。平动补偿不是本文研究的重点,因此假设目标与雷达之间不存在平动,雷达系统参数和目标运动参数如表1所示。空间目标散射点模型如图4所示,其由37个散射点构成。
[0078]
表2雷达和目标运动参数
[0079][0080]
图5~图7分别给出了snr=5db和snr=-5db情形下rd方法,cisgcpf-cicpf方法和本文提出的算法的isar成像结果。从图5可知,由于机动目标的复杂运动,方位多普勒频率
时变,isar图像出现严重散焦,不能很好地反应目标真实形状。图6最新提出的基于cisgcpf-cicpf的isar成像方法,由于充分挖掘了信号的相干积累特征,具有较高的成像质量;图7为本文提出的isar成像方法,从图中可以看出本文提出的方法具有较好的成像结果,并且低信噪比小优势明显。从仿真结果分析本文提出的isar成像算法成像质量优于其它方法。
[0081]
为了更好地评估不同算法的成像性能,本文引入信息熵和对比度两项指标评价isar成像质量。对于一幅距离单元数为n,方位脉冲数为m的isar图像g(m,n),信息熵i和对比度c的定义可分别表示为:
[0082][0083][0084]
其中,利用信息熵来衡量成像质量的标准是,信息熵越低成像质量越好,反之亦然。对比度衡量成像质量的标准与信息熵相反,即对比度越高成像质量越好,对比度越低成像质量越差。
[0085]
表2不同方法信息熵、对比度和运行时间
[0086][0087]
为了更清晰直观比较提出方法和现有成像方法成像的优势,本方案使用intel double-core处理器,主频2.4ghz,内存8gb,64位台式主机,window 10操作系统,在matlab 2014a环境下,对现有方法和本文提出的方法分别进行100次独立的噪声实现,不同方法得到的平均信息熵、对比度和运算时间如表2所示。从表2并结合成像结果分析可知,提出的方法与现有的rd方法,cisgcpf-cicpf方法相比,提出方法在保障成像质量的同时,降低了计算复杂度,并且低信噪比下性能稳健,与理论分析相一致。因此,在实际应用中可为获取空间机动目标isar图像提供一种有效的选择。
[0088]
上述实施例中,通过将完成平动补偿后的各距离单元信号建模为多成分立方相位信号;接着,利用高阶模糊函数将立方相位信号降阶为多成分线性调频信号;然后利用相干积累立方相位函数实现参数估计,重构原始信号实现isar成像。对比现有方法,该方法能够同时估计立方相位信号的二阶和三阶参数,具有较高的运算效率;同时通过增加了自项能
量,降低了信噪比门限,提高了低信噪比下参数估计的鲁棒性。最后,仿真数据实验验证了提出方法的有效性。
[0089]
在一个实施例中,如图8所示,提供了一种空间机动目标isar成像装置200,该装置包括原始信号获取模块210、信号降阶模块220、参数估计模块230、信号剔除模块240、信号判断模块250、k值判断模块260和目标isar成像模块270,其中:
[0090]
原始信号获取模块210用于,对回波信号进行距离向脉冲压缩和运动补偿,将所有散射点都校正到对应的距离单元,得到k个距离单元的原始信号;
[0091]
信号降阶模块220用于,通过高阶模糊函数对原始信号进行降阶处理,得到降阶后的信号;
[0092]
参数估计模块230用于,对信号进行相干积累立方相位函数计算,并通过峰值检测获取原始信号中第i分量的调频和二次调频;
[0093]
参数估计模块230还用于,根据调频和二次调频构建补偿函数,并利用傅里叶变换和峰值检测估计原始信号中第i分量的幅度和中心频率;
[0094]
信号剔除模块240用于,采用clean技术从原始信号中剔除步骤s3和s4中涉及的信号分量,得到新的目标信号;
[0095]
信号判断模块250用于,将目标信号作为新的原始信号,重复上述步骤s2-s5,直到目标信号数量小于1或者目标信号能量低于预设的能量门限;
[0096]
k值判断模块260用于,更新k=k 1,并重复上述步骤s2-s6,直至k等于距离单元的总数;
[0097]
isar成像模块270用于,根据目标信号,重构回波信号,进行方位向处理,得到目标isar图像。
[0098]
在一个实施例中,提供了一种设备,该设备可以是服务器,其内部结构图可以如图9所示。该设备包括通过系统总线连接的处理器、存储器、网络接口和数据库。其中,该设备的处理器用于提供计算和控制能力。该设备的存储器包括非易失性存储介质、内存储器。该非易失性存储介质存储有操作系统、计算机程序和数据库。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该设备的数据库用于存储配置模板,还可用于存储目标网页数据。该设备的网络接口用于与外部的终端通过网络连接通信。该计算机程序被处理器执行时以实现一种空间机动目标isar成像方法。
[0099]
本领域技术人员可以理解,图9中示出的结构,仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的设备的限定,具体的设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
[0100]
在一个实施例中,还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被计算机执行时使所述计算机执行如前述实施例所述的方法,所述计算机可以为上述提到的空间机动目标isar成像装置的一部分。
[0101]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一计算机可读取存储介质中,该程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(read-only memory,rom)或随机存储记忆体(random access memory,ram)等。
[0102]
显然,本领域的技术人员应该明白,上述本发明的各模块或各步骤可以用通用的计算装置来实现,它们可以集中在单个的计算装置上,或者分布在多个计算装置所组成的网络上,可选地,它们可以用计算装置可执行的程序代码来实现,从而,可以将它们存储在计算机存储介质(rom/ram、磁碟、光盘)中由计算装置来执行,并且在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤,或者将它们分别制作成各个集成电路模块,或者将它们中的多个模块或步骤制作成单个集成电路模块来实现。所以,本发明不限制于任何特定的硬件和软件结合。
[0103]
以上内容是结合具体的实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。