1.本发明涉及相干光学成像技术领域,尤其涉及基于光强互关联的非视域成像方法。
背景技术:
2.众所周知目标的图像可以利用其辐射或散射的光来构建。传统成像利用直接光,由目标直接传播到探测器的光,构建目标的像。与传统成像相比,一类新的非视域成像利用间接光,由目标通过漫反射或扩散传播到探测器的光,重建探测器视域外隐藏目标的像。因此,可以实现穿越随机介质成像和拐角成像。
3.近年来报道了多种用于解决不同成像问题的非视域成像方法。波前整形、传输矩阵测量、散斑自关联和鬼成像等方法可以成像被随机介质遮挡的目标。散斑互关联方法和共焦扩散层析成像技术实现了穿越厚随机介质成像。在光散射过程可以被准确模拟的情况下,时间飞行探测、计算潜望、空间相干探测等技术可以对一个拐角后目标的成像与定位。基于“记忆效应”的波前整形和散斑自关联方法证实无需求解光散射方程也能对隐藏在一个拐角后的目标成像。然而,这些非视域成像方法或适用于穿越随机介质成像,或适用于绕过一个拐角成像。成像位于多个拐角后并且被随机介质完全遮蔽的目标对现有方法是一个巨大的挑战。这类由随机介质和多个拐角组成的复杂环境,被称为“随机走廊”,通常存在于多尘矿井、烟雾弥漫的通风管道和建筑物走廊等救援场景中。对隐藏在随机走廊中的救援目标进行成像,可以大大提高救援效率,保护救援人员,因而具有十分重要的意义和价值。
4.针对以上不足,需要提供一种成本低廉、测量简便、图像重建效率高、实际应用范围广的非视域成像方法,以解决非视域成像随机走廊遮蔽目标的技术问题。
技术实现要素:
5.本发明涉及一种基于光强互关联的非视域(non-line-of-sight)成像方法,涉及光电成像与探测领域。本发明要解决的技术问题在于非视域成像随机走廊遮蔽目标,针对现有技术中的缺陷,本发明方法提供一种成本低廉、测量简便、图像重建效率高、实际应用范围广的非视域成像方法,利用多张散斑图重建原始目标信息,具有成像弯曲走廊中多个拐角后并且被随机介质遮蔽的目标的能力,能够实现大视角范围的多个目标非视域成像,不依赖于随机介质的厚度且抗噪性强,解决了非视域成像随机走廊遮蔽目标的技术问题。
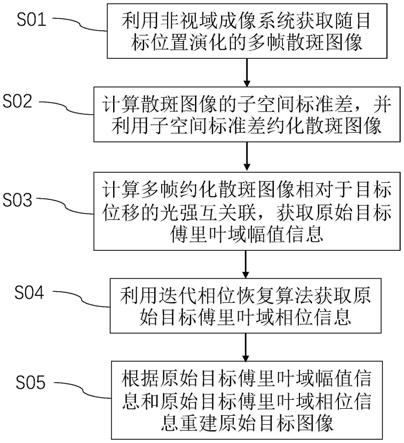
6.为了解决上述技术问题,本发明提供了一种基于光强互关联的非视域成像方法,其特征在于,包括如下步骤:利用非视域成像系统获取随目标位置演化的多帧散斑图像;计算散斑图像的子空间标准差,并利用子空间标准差约化散斑图像;计算多帧约化散斑图像相对于目标位移的光强互关联,获取原始目标傅里叶域幅值信息;利用迭代相位恢复算法获取原始目标傅里叶域相位信息;根据原始目标傅里叶域幅值信息和原始目标傅里叶域相位信息重建原始目标图像。
7.优选地,利用非视域成像系统获取随目标位置演化的多帧散斑图像步骤中,非视
域成像系统包括激光器、扩束透镜、二维移动平台、随机走廊、探测器;其中,激光器发出的光经过扩束透镜扩束后覆盖整个目标,目标安装在二维移动平台上,二维移动平台用于控制目标的位移,探测器用于采集移动的目标经过随机走廊后的多帧散斑图像。
8.优选地,随机走廊为内含静态随机介质的多拐角曲折走廊,目标被随机走廊完全遮蔽,探测器为彩色cmos相机。
9.优选地,随机走廊中的随机介质为白色有机玻璃,厚度为5~50mm。
10.优选地,计算散斑图像的子空间标准差,并利用子空间标准差约化散斑图像的步骤中,包括以下操作:对采集到的多帧散斑图像进行rgb彩色通道分离,获得与激光颜色相同的单色散斑图像;根据散斑图像的拍摄参数和尺寸设定正方形子空间区域,正方形子空间区域的边长为l
sub
;将散斑图像表示为i(r),散斑图像子空间标准差σ(r)可表示为,
[0011][0012]
其中,《i2(r)》
sub
表示对散斑图像中一个正方形子空间区域内的i2(r)平均,《i(r)》
sub
表示对散斑图像中一个正方形子空间区域内的i(r)平均,正方形子空间的中心位于一个给定的坐标r上;子空间约化散斑图像i
rd
(r)可表示为,
[0013]ird
(r)=i(r)/σ(r)。
[0014]
优选地,计算多帧约化散斑图像相对于目标位移的光强互关联,获取原始目标傅里叶域幅值信息的步骤中,包括以下操作:计算多帧约化散斑图像的空间系综平均强度互关联;利用被关联的两帧约化散斑图像对应的目标位移对强度互关联进行排序组合;对强度互关联进行优化处理;对约化散斑图像的强度互关联执行开平方、傅里叶逆变换、开平方、取绝对值运算,获得原始目标傅里叶域幅值信息。
[0015]
优选地,利用迭代相位恢复算法获取原始目标傅里叶域相位信息的步骤中,包括以下操作:将一个随机分布输入到迭代相位恢复算法中,开始相位恢复;用实验测得的目标傅里叶模值替换迭代相位恢复算法恢复出的目标傅里叶模值;用散斑图像强度互关联的几何特征约束迭代相位恢复算法恢复出的目标实空间模值;重复操作直至迭代相位恢复算法收敛,得到原始目标傅里叶域相位信息。
[0016]
优选地,根据原始目标傅里叶域幅值信息和原始目标傅里叶域相位信息重建原始目标图像的步骤中,包括以下操作:将目标在傅里叶域的模值信息和相位信息相结合,然后对其做傅里叶逆变换,重建目标在实空间的模值。
[0017]
优选地,方法的成像视场依赖于目标的最大移动距离和探测器的观测时间。
[0018]
优选地,方法的成像分辨率依赖于目标移动速度和探测器最小拍照时间间隔的乘积。
[0019]
实施本发明的基于光强互关联的非视域成像方法,具有以下有益效果:1、本发明基于光强互关联的非视域成像方法利用常规相机实现了对随机走廊遮蔽运动目标的非视域成像,能够在厚随机介质和多个拐角的干扰下成像任意尺寸的目标,图像恢复快速高效,目标成像清晰效果好。2、本发明的方法不依赖于散斑图像的观测位置和随机走廊拐角的数量,同时对噪声具有较强的适应性。3、本发明的方法所使用的散斑光强采集装置仅为一台常规cmos相机,相机前无额外的光学器件,成像光路简单、操作方便、效率高、成本低;相对于基于时间飞行探测的非视域成像方法,无需额外的放大光路以及光强的时间飞行信息或
偏振信息,因此成本低廉、测量简便、图像重建效率高、实际应用范围广;对相机的放大倍率没有特殊要求,在一个像素中包含102个散斑的情况下也能对隐藏目标成像,鲁棒性高。
附图说明
[0020]
图1是本发明实施例的基于光强互关联的非视域成像方法的流程图;
[0021]
图2是本发明实施例的基于光强互关联的非视域成像方法中的非视域成像系统的结构示意图;
[0022]
图3是本发明实施例的基于光强互关联的非视域成像方法中约化散斑图像步骤的流程图;
[0023]
图4是本发明实施例的基于光强互关联的非视域成像方法中获取原始目标傅里叶域幅值信息步骤的流程图;
[0024]
图5是本发明实施例的基于光强互关联的非视域成像方法中获取原始目标傅里叶域相位信息步骤的流程图;
[0025]
图中:1:激光器;2:扩束透镜;3:二维移动平台;4:随机走廊;5:探测器。
具体实施方式
[0026]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
图1是本发明实施例的基于光强互关联的非视域成像方法的流程图;如图1所示,本发明实施例提供的基于光强互关联的非视域成像方法,包括如下步骤;步骤s01:利用非视域成像系统获取随目标位置演化的多帧散斑图像;步骤s02:计算散斑图像的子空间标准差,并利用子空间标准差约化散斑图像;步骤s03:计算多帧约化散斑图像相对于目标位移的光强互关联,获取原始目标傅里叶域幅值信息;步骤s04:利用迭代相位恢复算法获取原始目标傅里叶域相位信息;步骤s05:根据原始目标傅里叶域幅值信息和原始目标傅里叶域相位信息重建原始目标图像。
[0028]
图2是本发明实施例的基于光强互关联的非视域成像方法中的非视域成像系统的结构示意图;如图2所示,本发明实施例提供的基于光强互关联的非视域成像方法,步骤s01中,非视域成像系统包括激光器1、扩束透镜2、二维移动平台3、随机走廊4、探测器5;其中,激光器1发出的光经过扩束透镜2扩束后照明运动目标,并且覆盖整个目标,目标安装在二维移动平台3上,二维移动平台3用于控制目标的位移,探测器5用于采集移动的目标经过随机走廊4后的多帧散斑图像。本发明提供的基于光强互关联的非视域成像方法的一个实施例中,随机走廊4为一类内含静态随机介质的多拐角曲折走廊,目标被随机走廊4完全遮蔽,探测器5用于采集目标透射光经过随机走廊4后的多帧散斑图像;探测器5为彩色cmos相机,像素为4024
×
6024;随机走廊4为白色有机玻璃填充的z形金属管,白色有机玻璃的厚度为5~50mm。在使用时,打开激光器1,将扩束透镜2扩束后的激光覆盖在目标上,用二维移动平台3控制目标做二维运动,同时利用彩色cmos相机采集目标的多帧散斑图像。本发明实施例提供的基于光强互关联的非视域成像方法,成像系统所使用的散斑图像采集装置仅为一台
常规cmos相机,相机前无额外的光学器件,成像光路简单、操作方便、效率高、成本低;对相机的放大倍率没有特殊要求,在一个像素中包含102个散斑的情况下也能对隐藏目标成像,鲁棒性高。
[0029]
图3是本发明实施例的基于光强互关联的非视域成像方法中约化散斑图像步骤的流程图;如图3所示,本发明实施例提供的基于光强互关联的非视域成像方法,步骤s02中,包括以下操作;步骤s021:获得单色散斑图像;步骤s022:根据散斑图像的拍摄参数和尺寸设定正方形子空间区域;步骤s023:计算散斑图像子空间标准差;步骤s024:获得子空间约化散斑图像。
[0030]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s021中,将采集到的多帧散斑图像的raw格式文件由相机中导出,利用dcraw程序提取出散斑图像的raw格式文件中保存的数据并进行rgb彩色通道分离,获得与激光颜色相同的单色散斑图像;在一个实施例中,激光器1为he-ne激光器,因此利用红色通道中的散斑图像i(r)重建视域外运动目标的图像。
[0031]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s022中,根据散斑图像的拍摄参数和尺寸设定正方形子空间区域,正方形子空间区域的边长为l
sub
;在一个实施例中,非视域成像系统中,随机走廊4为白色有机玻璃,白色有机玻璃厚度为5mm,一个相机像素内包含》4个散斑的情况下,子空间区域的边长应取l
sub
≤100l
pixel
,其中l
pixel
表示相机像素的边长。
[0032]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s023中,将散斑图像的幅值表示为i(r),散斑图像子空间标准差σ(r)可表示为,
[0033][0034]
其中,《...》
sub
表示对散斑图像中一个边长为l
sub
的正方形子空间区域内的有关i(r)的数值的平均,正方形子空间的中心位于一个给定的坐标r上。
[0035]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s024中,子空间约化散斑图像i
rd
(r)可表示为,
[0036]ird
(r)=i(r)/σ(r)。
[0037]
图4是本发明实施例的基于光强互关联的非视域成像方法中获取原始目标傅里叶域幅值信息步骤的流程图;如图4所示,本发明实施例提供的基于光强互关联的非视域成像方法,步骤s03中,包括以下操作;步骤s031:计算多帧约化散斑图像的空间系综平均强度互关联;步骤s032:利用被关联的两帧约化散斑图像对应的目标位移对强度互关联进行排序组合;步骤s033:对强度互关联进行优化处理;步骤s034:对约化散斑图像的强度互关联执行开平方-傅里叶逆变换-开平方-取绝对值运算,获得原始目标傅里叶域幅值信息。
[0038]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s031中,利用如下定义计算多帧约化散斑图像的空间系综平均强度互关联c
rd
(δr),
[0039][0040]
其中,i
rd
(r;r0)表示目标位于r0时的散斑图像,i
rd
(r;r0 δr)表示目标位于r0 δr
时的散斑图像,表示对散斑图像的像素r和目标的位置r0平均,和分别表示约化散斑图像的平均值与标准差。
[0041]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s032中,利用被关联的两帧散斑图像i
rd
(r;r0)和i
rd
(r;r0 δr)对应的目标位移δr对强度互关联c
rd
(δr)进行排序组合。
[0042]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s033中,对强度互关联进行插值、平滑以及利用重整化消除噪声影响等优化处理。
[0043]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s034中,对约化散斑图像的强度互关联执行开平方-傅里叶逆变换-开平方-取绝对值,获得原始目标傅里叶域幅值信息,即目标的傅里叶模值其具体方法如下,
[0044][0045]
其中,
[0046][0047]
其表示激光入射到目标上的约化无量纲透射场,e(r;r0)表示目标的透射场。
[0048]
图5是本发明实施例的基于光强互关联的非视域成像方法中获取原始目标傅里叶域相位信息步骤的流程图;如图5所示,本发明实施例提供的基于光强互关联的非视域成像方法,步骤s04中,包括以下操作;步骤s041:将一个随机分布输入到迭代相位恢复算法中,开始相位恢复;步骤s042:用实验测得的目标傅里叶模值替换迭代相位恢复算法恢复出的目标傅里叶模值;步骤s043:用散斑图像强度互关联的几何特征约束迭代相位恢复算法恢复出的目标实空间模值;步骤s044:重复操作直至迭代相位恢复算法收敛,得到原始目标傅里叶域相位信息。
[0049]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s041中,将一个随机分布作为初值输入到迭代相位恢复算法中,开始相位恢复。
[0050]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s042中,用实验测得的目标傅里叶模值替换相位恢复算法第t次迭代恢复出的目标傅里叶模值
[0051]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s043中,用散斑图像强度互关联的几何特征约束相位恢复算法第t次迭代恢复出的目标实空间模值
[0052]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s044中,重复步骤
s042和s043直至迭代相位恢复算法收敛,得到原始目标傅里叶域相位信息φ(kr)。
[0053]
本发明实施例提供的基于光强互关联的非视域成像方法,步骤s05中,根据原始目标傅里叶域幅值和相位φ(kr)的信息重建原始目标图像,具体方法为,
[0054][0055]
将和φ(kr)相结合,然后对其做傅里叶逆变换,即可重建目标在实空间的模值,完成了对视域外运动目标的成像。
[0056]
本发明实例具体实现了对随机走廊遮蔽运动目标的非视域成像,可应用于灾难救援、自动驾驶、机器视觉和生物医学成像等技术领域。方法的应用范围不限于激光探测,还包括其他类型的相干波探测,如电磁波、声波和量子波。
[0057]
综上,本发明基于光强互关联的非视域成像方法利用常规相机实现了对随机走廊遮蔽运动目标的非视域成像,能够在厚随机介质和多个拐角的干扰下成像任意尺寸的目标,图像恢复快速高效,目标成像清晰效果好。本发明提出的方法不依赖于散斑图像的观测位置、随机走廊拐角的数量和其中随机介质的厚度,同时对噪声具有较强的适应性。本发明提出的方法无需额外的放大光路以及光强的时间飞行信息或偏振信息,因此成本低廉、测量简便、图像重建效率高、实际应用范围广。
[0058]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。