1.本发明涉及空战威胁评估技术领域,具体涉及一种解决属性权重 和时间权重复杂性的动态决策方法。
背景技术:
2.在空战中由于决策过程的时变性,以及战机飞行速度,角度等属 性的不断变化,使得在决策过程中涉及大量不确定的信息。为得到较 为准确的评估结果,国内外学者在动态多目标决策方面进行了大量研 究,从最开始根据单一时刻的目标信息发展到根据一段时间内各个目 标的数据变化而进行决策。现有大多数决策算子都是基于属性间静态 关系的表示,难以表达不同时刻决策数据之间的相关性。同时,在时 间权重求解方面,现有方法大多依赖于主观设置,忽略了客观因素, 时间权重设置的合理性较差;且忽略了决策者的主观偏好,难以反映 不同时刻的偏好信息。
技术实现要素:
3.针对空战威胁评估问题,本技术提供一种解决属性权重和时间权 重复杂性的动态决策方法,其提高了决策结果的可靠性,有效地降低 了算法的时间复杂度,能更精确的对空战目标进行威胁评估。
4.为实现上述目的,本技术的技术方案为:一种解决属性权重和时 间权重复杂性的动态决策方法,包括:
5.根据战场环境,提取每个目标战机的决策信息;
6.将所述目标战机属性信息转换为不同时刻tk的区间直觉模糊矩 阵,得到决策矩阵
7.使用离差最大化方法获取每个所述目标战机的属性权重w(t);
8.利用数据聚合算子ivifpwga将不同时刻tk决策矩阵中的 元素进行聚合,得到各敌方战机ti在不同时刻tk的综合区间直觉 模糊值
9.通过优劣解距离法topsis得到时间权重向量λ(t);
10.利用数据聚合算子divifpwga将不同时刻tk的综合区间直觉模 糊值进行聚合,得到各敌方战机ti在每个时刻tk的综合区间直觉 模糊值
11.获取综合区间直觉模糊值的得分函数和准确度函数
[0012][0013]
对所述得分函数进行排序,得到决策结果。
[0014]
进一步的,将所述目标战机属性信息转换为不同时刻tk的区间直 觉模糊矩阵,得
到决策矩阵具体为:
[0015]
设目标战机集t={t1,t2,...,tn},速度、角度等属性集 g={g1,g2,...,gm},通过收集各目标战机在各时刻tk的属性信息,得到 决策矩阵设时间向量为:λ(tk)=(λ(t1),λ(t2),...,λ(t
p
))
t
,满足 属性权重为 ω(tk)=(ω1(tk),ω2(tk),...,ωm(tk))
t
,且满足ωj(tk)∈[0,1]和 [0016]
进一步的,所述数据聚合算子ivifpwga将目标战机信息转换 成决策矩阵中的元素进行聚合,得到各敌方战机在不同时刻的综合区 间直觉模糊值:设为一组敌方战机的属性 区间值直觉模糊数,数据聚合算子ivifpwga的定义如下:
[0017][0018][0019]
是两个区间值直觉模糊数的归一化汉明距离。
[0020]
进一步的,所述数据聚合算子divifpwga利用幂加权几何平均 算子的非线性性质来连接聚合数据的相互关系:设置敌方战机有速 度、角度、距离等m个属性,为t1,t2,...,t
p
时刻的 第j(j=1,2,...,m)个属性的属性值,其中由区间直觉模糊数表示, 同时λ(t)=(λ(t1),λ(t2),...,λ(t
p
))
t
为各个时期的时间权重向量,且满足 λ(tk)≥0,和k=1,2,...,p;则数据聚合算子divifpwga 为:
[0021][0022]
在现有算法中集结算子处理动态决策问题时,难以描述决策信息 的模糊特征;同时,现有加权平均算子不考虑聚合空战数据之间的关 系。为此,提出了divifpwga算子,可用于处理具有相互关系的动 态区间值直觉模糊多属性决策问题。
[0023]
进一步的,目标战机属性主要包括空战能力、距离、速度和角度, 其权重与属性本身的重要程度密切相关。利用模糊距离来度量空战目 标属性与其他属性之间的偏差,偏差值越小,决策过程中属性的贡献 值就越小,相应的权重应该越小;反之,偏差值较大,决策
过程中属 性贡献值较大,相应权重较大。根据上述描述,当目标战机属性权重 完全未知时,最大偏差模型如下:
[0024][0025]
其中,d(ω)表示所有目标战机和其他战机之间的所有属性总偏 差值,表示任意两个属性下的两个空战目标之间汉明距离;由 于目标战机属性值为区间直觉模糊的形式,因此选择了常用的汉明距 离来测量区间直觉模糊数之间的距离。
[0026][0027]
为求解所述最大偏差模型,构造拉格朗日函数为:
[0028][0029]
对式(5)求偏导,得到目标战机的属性权重:
[0030][0031]
进一步的,通过优劣解距离法topsis得到时间权重向量λ(t), 一方面,该方法整合了决策者对时间信息的偏好;另一方面,由于时 间权重的向量特征是比较明显的,采用dice相似系数代替欧式距离, 以确定实际时间权重与正负理想解的接近程度。具体为:
[0032]
设λ(tk)=(λ(t1),λ(t2),...,λ(t
p
))
t
时间序列权值向量,表示不同时间 点的重要性,并满足λ(tk)∈[0,1],令其中 θ∈[0,1],表示我方战机驾驶员即决策者对时间序列的偏好程度,其值 根据决策者的经验和偏好设定;θ越趋向0,表示决策者越偏好当前 时刻;θ越趋向1,表示决策者越偏好历史信息,利用信息熵最大化 原则建立(m-1)非线性模型:
[0033][0034]
当λ(tk)=(0,0,....,1)
t
时,θ=0,表明决策者完全偏好于近期决策信 息,记时间权值的正理想解为:λ(tk)
=(0,0,....,1)
t
;当λ(tk)=(1,0,....,0)
t
时,θ=1,表明决策者完全偏好前期数据,记时间权值的负理想解为: λ(tk)-=(1,0,....,0)
t
;时间权重向量与正负理想解的相似程度为:
[0035][0036][0037]
则时间权向量与理想解的相关系数c为:
[0038][0039]
其中,s=s(λ(tk),λ(tk)
) s(λ(tk),λ(tk)-)
[0040]
更进一步的,建立(m-2)非线性模型:
[0041][0042]
为使时间权重值既包含主观偏好,又包含客观实际,结合(m-1)、 (m-2)给出(m-3)非线性模型:
[0043][0044]
通过求解式(12)得到时间权值向量;其中q是两种非线性模型 的平衡系数,满足q∈[0,1],由不同的决策者决定;q越靠近1,表明 决策者设置的时间权重越倾向于主观偏好;q越靠近0,表明决策者 设置的时间权重越倾向于客观实际。
[0045]
更进一步的,各敌方战机ti在不同时刻tk的综合区间直觉模糊值 为:
[0046][0047]
作为更进一步的,各敌方战机ti在每个时刻tk的综合区间直觉模 糊值
[0048][0049]
作为更进一步的,获取综合区间直觉模糊值的得分函数和 准确度函数具体为:对于任何区间值的直觉模糊数 都有:
[0050][0051]
[0052]
其中,
[0053]
对于任意两个区间直觉模糊数和满足:
[0054][0055]
当增大时,相应的区间直觉模糊数就越大。
[0056]
本发明由于采用以上技术方案,能够取得如下的技术效果:本发 明利用ivifpwga算子与divifpwga算子来解决不同时刻决策数 据的相关性问题,同时设计基于时间序列偏好的topsis时间权值求 解方法,既考虑了空战目标的模糊不确定性又考虑了敌方战机信息的 动态特征,通过提出的动态决策方法,解决了属性权重和时间权重复 杂性,提高了决策结果的可靠性,有效地降低了算法的时间复杂度, 能更精确的对空战目标进行威胁评估,满足了战场环境下对于威胁评 估和动态决策的要求。
附图说明
[0057]
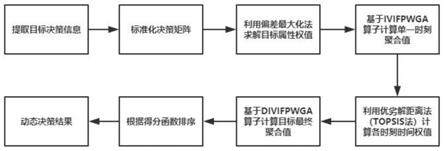
图1为基于属性权重和时间权重的动态决策过程图;
[0058]
图2为各目标在t1~t4时间内的排序结果比较图;
[0059]
图3为速度的灵敏度分析图;
[0060]
图4为角度的灵敏度分析图;
[0061]
图5为距离的灵敏度分析图。
具体实施方式
[0062]
本发明的实施例是在以本发明技术方案为前提下进行实施的,给 出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于 下述实施例。
[0063]
如图1所示,本实施例提供解决属性权重和时间权重复杂性的动 态决策方法,为验证本发明的可行性和有效性,进行了空战目标的威 胁评估、时间因素对决策结果的影响分析、属性参数的敏感度分析实 验。
[0064]
(1)空战目标的威胁评估实验
[0065]
以空战目标的威胁评估为例,目标属性主要包括空战能力、距离、 速度和角度,与空战能力威胁度、距离威胁度、速度威胁度和角度威 胁度相对应。
[0066]
空战能力威胁度。空战能力可分为从强到弱的5个层次,并通过 区间直觉模糊形式来表示目标空战能力威胁水平,如表1所示。
[0067]
表1
[0068][0069]
距离威胁度。通过目标距离我方的远近,判断敌方的攻击意图和 攻击成功的概率。当然,目标离的越近,对我方的威胁就越大;反之, 威胁越小。距离威胁度的区间直觉模糊形式为:
[0070][0071]
速度威胁度。目标速度与武器系统反应时间的长短和毁伤概率的 大小有直接关联。目标速度越快,对我方的冲击越大,威胁也越大。 速度威胁度的区间直觉模糊形式为:
[0072][0073]
角度威胁度。目标攻击角度可以是我方受保护区域到空袭目标瞬 时速度在水平平面上的投影延长的线的垂直距离的大小,更大的攻击 角度意味着威胁更小。角度威胁度的区间直观模糊形式为:
[0074][0075]
式中,ki,li,ai,βi,和γi的值由各属性数据信息的准确度 和交战环境确定,满足0≤ki li≤1,0≤ai βi≤1,
[0076]
经过以上过程处理,可将各目标的威胁评估转化为区间直觉模糊 条件下的目标威胁评估。实例有4架战机t={t1,t2,t3,t4},距离威胁度 参数k=0.7、l=0.2,速度威胁度参数α=0.7、β=0.3,角度威胁度参 数γ=0.2,数据如表2所示。t
1-t4是四个相邻时间的数据信 息,t4是最新数据。利用本发明的动态决策方法完成目标威胁排序分 析。首先,参照表1和表2计算每个对应目标的区间直觉模糊矩阵, 如表3所示,根据上述公式得到属性权重θ=0.3和时间权重q=0.5。 然后,使用ivifpwga算子重新组织中的元素。接下来, 利用divifpwga算子聚合不同时间的综合区间直觉模糊,得到每个 目标的直觉模糊综合区间。最后,计算4架战机的得分函数与准确度 函数,基于上述的函数值,得到评估结果为:target2>target 3>target 4>target 1。
[0077]
表2
[0078][0079]
表3
[0080][0081][0082]
(2)时间因素对决策结果的影响分析实验
[0083]
图2为各目标在t
1-t4时间内的排序结果比较分析。从图2可以看 出,同一目标威胁在一段时间内不断变化,且目标在不同时间的顺序 相同,但威胁的大小可能会有所不同。仅考虑单个时间的静态评估方 法可能不会理想地表现出动态特性。例如,只考虑时间t4得到的威胁 评估结果是:target 2>target 1>target 3>target 4,而本发明方法得 到的动态评估结果是:target 2>target 3>target 4>target 1。这是由 于此发明所提出的方法不仅考虑了目标4在整个评估过程中速度、角 度和距离威胁的降低趋势,又考虑了
目标3速度、角度和距离威胁的 突然增加的变化。因此,得到的威胁评估结果更加可靠。
[0084]
为说明本发明所提方法的优点,对动态评价结果在时间t4处进行 了比较,并与[文献:y.zhang,q.feng,d.zhou,dynamicmulti-attribute threat assessment forair combat based on intuitionisticfuzzy set.electronics optics&control.2015.]中的结果进行了比较。 本发明达到的威胁最高目标与他法达到的目标一致,说明了本文方法 的正确性。从整体上来看,三种方法得到的排序结果有所区别,只处 理t4时刻各目标的威胁信息,得到的目标威胁评估结果具有瞬时性。 其它方法中对各目标进行威胁评估设置为动态进行,可以反映每个目 标的时间和战场态势变化,但是并没有在信息处理中考虑数据之间的 关系,同时只给出了权重的简单解。此发明通过反映目标的动态特性, 利用幂加权几何平均算子连接数据之间的相关性,同时考虑权重的准 确性。因此,获得的威胁评估结果可以变得更加可靠;同时与他法相 比,处理时间略有优势,运行时间也减少了3.01%。
[0085]
(3)属性参数的敏感度分析实验
[0086]
为分析区间直觉模糊集对各属性下每个目标决策过程中模糊不 确定度的影响程度,下面进行属性参数的敏感性分析。通过对具有相 应属性的每个目标的直觉模糊数的隶属度和非隶属度范围进行微调, 调整公式为:
[0087][0088]
其中,q=-δσ
l
/h,...,-1,0,1,...,δσ
l
/h,h作为步长,四个属性的隶 属度和非隶属度的变化区间为这里选取隶属度和 非隶属度的变化区间为依次改变目标的速度、角度、距 离,其敏感性分析分别对应图3、图4和图5所示。
[0089]
总的来看,不同属性下区间直觉模糊值小幅度改变时,虽然对于 最终的排序并未产生很大的影响,但4个目标对于不同属性变化的反 应程度不同,可以通过不同目标对于各个属性变化的反应程度分析针 对不同目标的应对策略。
[0090]
由图3可知,各目标对于速度的变化,整体趋于稳定;说明在速 度上,各目标势均力敌,随着隶属度和非隶属度的改变对我方的威胁 程度变化不大。由图4可知,目标4对于航向的变化比较敏感,并随 着航向区间直觉模糊值中隶属度的增大,其得分函数值下降;说明在 目标4对我方的威胁程度随着航向隶属度的增加呈现下降趋势。由图 5可知,目标4对于距离的变化比较敏感,目标4随着距离区间直觉 模糊值的变化,得分函数值呈现一种先小幅度上升,整体下降的趋势; 说明目标4在距离上的改变对于我方的威胁程度相对较小。
[0091]
前述对本发明的具体示例性实施方案的描述是为了说明和例证 的目的。这些描述并非想将本发明限定为所公开的精确形式,并且很 显然,根据上述教导,可以进行很多改变和变化。对示例性实施例进 行选择和描述的目的在于解释本发明的特定原理及其实际应用,从而 使得本领域的技术人员能够实现并利用本发明的各种不同的示例性 实施方案以及各种不同的选择和改变。本发明的范围意在由权利要求 书及其等同形式所限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。