1.本技术涉及摄像模组领域,且更为具体地,涉及集成式双变焦潜望式成像系统、摄像模组、多摄摄像模组和电子设备。
背景技术:
2.随着移动电子设备的普及,消费者对于手机、平板等电子设备的摄像功能的要求越来越高。例如,近年来,光学变焦在移动电子设备上的应用需求越来越强烈。然而,光学变焦功能的实现对于摄像模组而言是一个巨大挑战。
3.具体来说,首先具有光学变焦功能的摄像模组相较常规的摄像模组具有复杂的光学设计和复杂的机械结构,这会导致摄像模组的体积增加,这无疑与电子设备轻薄化发展的趋势相悖。
4.其次,当期待的光学变焦范围较大时,摄像模组的设计难度将大大提升,模组尺寸也变得较大。并且,更为严重的是,该摄像模组在部分焦距下的清晰度会严重下降,也就是,当期待的光学变焦范围较大时,在进行光学变焦的过程中,存在部分焦距下成像清晰度不高的问题。
5.因此,需要一种优化的能够实现较大光学变焦能力的解决方案。
技术实现要素:
6.本技术的一个优势在于提供一种集成式双变焦潜望式成像系统、摄像模组、多摄摄像模组和电子设备,其中,所述集成式双变焦潜望式成像系统包括两个在光学变焦性能上相互配合且在结构上被集成设置的潜望式成像子系统,以具有更强的光学变焦能力。
7.本技术的另一优势在于提供一种集成式双变焦潜望式成像系统、摄像模组、多摄摄像模组和电子设备,其中,所述集成式双变焦潜望式成像系统在各个有效焦距下皆具有相对较高的成像质量。
8.本技术的另一优势在于提供一种集成式双变焦潜望式成像系统、摄像模组、多摄摄像模组和电子设备,其中,两个潜望式成像子系统在结构上集成地设置,以使得所述集成式双变焦潜望式摄像模组在其z轴方向上和y轴方向上的尺寸能够得以缩减。
9.根据本技术的一方面,提供了一种集成式双变焦潜望式成像系统,其包括:
10.第一光反射元件和第二光反射元件;
11.具有至少二光学透镜的第一透镜组和具有至少二光学透镜的第二透镜组;
12.感光组件,其中,所述第一透镜组对应于所述第一光反射元件,所述第一透镜组被设置于所述感光组件的感光范围内,以通过所述第一光反射元件、所述第一透镜组和所述感光组件构成第一成像子系统;所述第二透镜组对应于所述第二光反射元件,所述第二透镜组被设置于所述感光组件的感光范围内,以通过所述第二光反射元件、所述第二透镜组和所述感光组件构成第二成像子系统;以及
13.用于移动所述第一成像子系统中所述第一透镜组的至少部分光学透镜以进行光
学变焦以及移动所述第二成像子系统中所述第二透镜组的至少部分光学透镜以进行光学变焦的驱动组件;
14.其中,所述第一成像子系统的光学变焦的范围为n1≤efl1≤n2,efl1表示所述第一成像子系统的第一等效焦距;所述第二成像子系统的光学变焦的范围为m1≤efl2≤m2,efl2表示所述第二成像子系统的第二等效焦距,其中,n1、n2、m1与m2满足关系:m2>n2,m1>n1且|m1-n2|/|m2-n1|≤20%。
15.在根据本技术的集成式双变焦潜望式成像系统中,n2<m1。
16.在根据本技术的集成式双变焦潜望式成像系统中,m2>n2≥m1。
17.在根据本技术的集成式双变焦潜望式成像系统中,80%≤(m2-m1)/(n2-n1)≤125%。
18.在根据本技术的集成式双变焦潜望式成像系统中,m2-m1=n2-n1。
19.在根据本技术的集成式双变焦潜望式成像系统中,所述感光组件包括第一感光芯片和第二感光芯片,所述第一透镜组被设置于所述第一感光芯片的感光路径上,所述第二透镜组被设置于所述第二感光芯片的感光路径上。
20.在根据本技术的集成式双变焦潜望式成像系统中,所述感光组件包括感光芯片,所述感光芯片具有第一感光区和第二感光区,其中,所述第一透镜组被设置于所述第一感光区的感光路径上,所述第二透镜组被设置于所述第二感光区的感光路径上。
21.在根据本技术的集成式双变焦潜望式成像系统中,所述感光组件包括感光芯片和用于移动所述感光芯片在第一位置和第二位置之间移动的驱动元件,其中,当所述感光芯片被移动至所述第一位置时,所述第一透镜组位于所述感光芯片的感光路径上;当所述感光芯片被移动至所述第二位置时,所述第二透镜组位于所述感光芯片的感光路径。
22.在根据本技术的集成式双变焦潜望式成像系统中,所述第一透镜组包括至少二透镜组单元,每一透镜组单元包括至少一光学透镜;所述第二透镜组包括至少二透镜组单元,每一透镜组单元包括至少一光学透镜。
23.在根据本技术的集成式双变焦潜望式成像系统中,所述驱动组件包括用于移动所述第一透镜组中至少二透镜组单元的第一驱动机构;以及,用于移动所述第二透镜组中至少二透镜组单元的第二驱动机构。
24.在根据本技术的集成式双变焦潜望式成像系统中,所述驱动组件包括用于同时移动所述第一透镜组中至少一透镜组单元和所述第二透镜组中至少一透镜组单元的第一驱动机构,以及,同时移动所述第一透镜组中其他至少一透镜组单元和所述第二透镜组中其他至少一透镜组单元的第二驱动机构。
25.根据本技术的另一方面,还提供了一种集成式双变焦潜望式摄像模组,其包括:
26.壳体,沿着其所设定的长度方向具有第一安装腔、第二安装腔和第三安装腔;
27.设置于所述第一安装腔的第一光反射元件和第二光反射元件;
28.设置于所述第二安装腔的第一透镜组和第二透镜组;
29.设置于所述第三安装腔的感光组件;其中,所述第一透镜组对应于所述第一光反射元件,所述第一透镜组被设置于所述感光组件的感光范围内,以通过所述第一光反射元件、所述第一透镜组和所述感光组件构成第一成像子系统;所述第二透镜组对应于所述第二光反射元件,所述第二透镜组被设置于所述感光组件的感光范围内,以通过所述第二光
反射元件、所述第二透镜组和所述感光组件构成第二成像子系统;以及
30.设置于所述第二安装腔内且用于移动所述第一成像子系统中所述第一透镜组的至少部分光学透镜以进行光学变焦以及移动所述第二成像子系统中所述第二透镜组的至少部分光学透镜以进行光学变焦的驱动组件。
31.在根据本技术的集成式双变焦潜望式摄像模组中,所述集成式双变焦潜望式摄像模组进一步包括第一载体,所述第一光反射元件和所述第二光反射元件被安装于所述第一载体,其中,所述第一光反射元件、所述第二光反射元件和所述第一载体形成模块化结构。
32.在根据本技术的集成式双变焦潜望式摄像模组中,所述第一光反射元件与所述第二光反射元件一体结合。
33.在根据本技术的集成式双变焦潜望式摄像模组中,所述感光组件包括第一感光芯片和第二感光芯片,所述第一透镜组被设置于所述第一感光芯片的感光路径上,所述第二透镜组被设置于所述第二感光芯片的感光路径上。
34.在根据本技术的集成式双变焦潜望式摄像模组中,所述感光组件包括感光芯片,所述感光芯片具有第一感光区和第二感光区,其中,所述第一透镜组被设置于所述第一感光区的感光路径上,所述第二透镜组被设置于所述第二感光区的感光路径上。
35.在根据本技术的集成式双变焦潜望式摄像模组中,所述感光组件包括感光芯片和用于移动所述感光芯片在第一位置和第二位置之间移动的驱动元件,其中,当所述感光芯片被移动至所述第一位置时,所述第一透镜组位于所述感光芯片的感光路径上;当所述感光芯片被移动至所述第二位置时,所述第二透镜组位于所述感光芯片的感光路径。
36.在根据本技术的集成式双变焦潜望式摄像模组中,所述第一透镜组包括至少二透镜组单元,每一透镜组单元包括至少一光学透镜;所述第二透镜组包括至少二透镜组单元,每一透镜组单元包括至少一光学透镜。
37.在根据本技术的集成式双变焦潜望式摄像模组中,所述驱动组件包括用于移动所述第一透镜组中至少二透镜组单元的第一驱动机构;以及,用于移动所述第二透镜组中至少二透镜组单元的第二驱动机构。
38.在根据本技术的集成式双变焦潜望式摄像模组中,所述壳体进一步包括设置于所述第二安装腔内以将所述第二安装腔划分为第一安装室和第二安装室的隔板,其中,所述第一透镜组被设置于所述第一安装室,所述第二透镜组被安装于所述第二安装室。
39.在根据本技术的集成式双变焦潜望式摄像模组中,至少部分所述第一驱动机构被安装于所述隔板的第一侧;至少部分所述第二驱动机构被安装于所述隔板的相对于所述第一侧的第二侧。
40.在根据本技术的集成式双变焦潜望式摄像模组中,所述集成式双变焦潜望式摄像模组进一步包括一第二载体和一第三载体,其中,所述第一透镜组中至少一透镜组单元和所述第二透镜组中至少一透镜组单元被安装于所述第二载体,以及,所述第一透镜组中其他至少一透镜组单元和所述第二透镜组中其他至少一透镜组单元被安装于所述第三载体。
41.在根据本技术的集成式双变焦潜望式摄像模组中,所述驱动组件包括用于移动所述第二载体以同时带动所述第一透镜组中至少一透镜组单元和所述第二透镜组中至少一透镜组单元的第一驱动机构,以及,用于移动所述第三载体以同时带动所述第一透镜组中其他至少一透镜组单元和所述第二透镜组中其他至少一透镜组单元的第二驱动机构。
42.在根据本技术的集成式双变焦潜望式摄像模组中,所述第一成像子系统的光学变焦的范围为n1≤efl1≤n2,efl1表示所述第一成像子系统的第一等效焦距;所述第二成像子系统的光学变焦的范围为m1≤efl2≤m2,efl2表示所述第二成像子系统的第二等效焦距,其中,n1、n2、m1与m2满足关系:m2>n2,m1>n1且|m1-n2|/|m2-n1|≤20%。
43.在根据本技术的集成式双变焦潜望式摄像模组中,n2<m1。
44.在根据本技术的集成式双变焦潜望式摄像模组中,m2>n2≥m1。
45.在根据本技术的集成式双变焦潜望式摄像模组中,80%≤(m2-m1)/(n2-n1)≤125%。
46.在根据本技术的集成式双变焦潜望式摄像模组中,m2-m1=n2-n1。
47.根据本技术的又一方面,还提供了一种多摄摄像模组,其包括:第一摄像模组,具有第一等效焦距a;以及,如上所述的集成式双变焦潜望式摄像模组。
48.在根据本技术的多摄摄像模组中,n1=3a,n2=7a,m1=6a,m2=10a。
49.在根据本技术的多摄摄像模组中,n1=3a,n2=6a,m1=7a,m2=10a。
50.根据本申情的另一方面,还提供了一种电子设备,其包括:如上所述的集成式双变焦潜望式摄像模组,或者,如上所述的多摄摄像模组。
51.通过对随后的描述和附图的理解,本技术进一步的目的和优势将得以充分体现。
52.本技术的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
53.通过结合附图对本技术实施例进行更详细的描述,本技术的上述以及其他目的、特征和优势将变得更加明显。附图用来提供对本技术实施例的进一步理解,并且构成说明书的一部分,与本技术实施例一起用于解释本技术,并不构成对本技术的限制。在附图中,相同的参考标号通常代表相同部件或步骤。
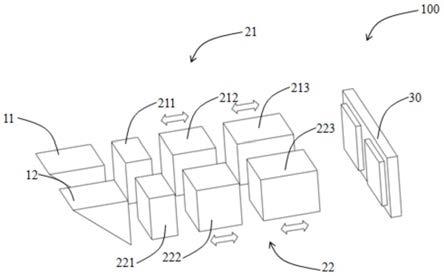
54.图1图示了根据本技术实施例的集成式双变焦潜望式成像系统的结构示意图。
55.图2图示了根据本技术实施例的所述集成式双变焦潜望式成像系统中感光组件的示意图。
56.图3图示了根据本技术实施例的所述集成式双变焦潜望式成像系统中所述感光组件的一变形实施的示意图。
57.图4图示了根据本技术实施例的所述集成式双变焦潜望式成像系统中所述感光组件的另一变形实施的示意图。
58.图5图示了根据本技术实施例的集成式双变焦潜望式摄像模组的立体示意图。
59.图6图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的爆炸图。
60.图7图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的示意图。
61.图8图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的一变形实施的局部示意图。
62.图9图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的另一变形实施的立体图。
63.图10图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的另一变形
实施的爆炸图。
64.图11图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的另一变形实施的示意图。
65.图12图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的感光组件的示意图。
66.图13图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的又一变形实施的示意图。
67.图14图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组的又一变形实施的示意图
68.图15图示了根据本技术实施例的多摄摄像模组的示意图。
69.图16图示了根据本技术实施例的电子设备的示意图。
70.图17图示了根据本技术实施例的电子设备的另一示意图。
具体实施方式
71.下面,将参考附图详细地描述根据本技术的示例实施例。显然,所描述的实施例仅仅是本技术的一部分实施例,而不是本技术的全部实施例,应理解,本技术不受这里描述的示例实施例的限制。
72.示意性集成式双变焦潜望式成像系统
73.图1图示了根据本技术实施例的集成式双变焦潜望式成像系统的结构示意图。如图1所示,根据本技术实施例的所述集成式双变焦潜望式成像系统100,包括相互平行设置的第一成像子系统101和第二成像子系统102,其中,所述第一成像子系统101与所述第二成像子系统102在光学变焦性能上相互配合,以不仅能够扩展所述集成式双变焦潜望式成像系统100的整体光学变焦范围,而且,能够使得所述集成式双变焦潜望式成像系统100在任何等效焦距下都具有相对较高的成像质量。
74.更具体地,如图1所示,根据根据本技术实施例的所述集成式双变焦潜望式成像系统100,包括:第一光反射元件11和第二光反射元件12、第一透镜组21和第二透镜组22、以及,感光组件30,其中,所述第一透镜组21对应于所述第一光反射元件11,所述第一透镜组21被设置于所述感光组件30的感光范围内,以通过所述第一光反射元件11、所述第一透镜组21和所述感光组件30构成第一成像子系统101;所述第二透镜组22对应于所述第二光反射元件12,所述第二透镜组22被设置于所述感光组件30的感光范围内,以通过所述第二光反射元件12、所述第二透镜组22和所述感光组件30构成第二成像子系统102。
75.特别地,在本技术实施例中,所述第一成像子系统101的光学变焦的范围为n1≤efl1≤n2,efl1表示所述第一成像子系统101的第一等效焦距;所述第二成像子系统102的光学变焦的范围为m1≤efl2≤m2,efl2表示所述第二成像子系统102的第二等效焦距,其中,m2>n2,m1>n1,相应地,所述集成式双变焦潜望式成像系统100便能够实现等效焦距在n1~m2之间的变化,即,所述集成式双变焦潜望式成像系统100能够实现等效焦距可以在n1~m2中任意一值,这样,所述第一成像子系统101与所述第二成像子系统102在光学变焦性能上相互配合,以不仅能够扩展所述集成式双变焦潜望式成像系统100的整体光学变焦范围,而且,能够使得所述集成式双变焦潜望式成像系统100在任何等效焦距下都具有相对较
高的成像质量。
76.并且,为了便于用于执行光学变焦功能的驱动组件的实施,在本技术实施例中,n1、n2、m1与m2满足关系:|m1-n2|/|m2-n1|≤20%。也就是,在本技术实施例中,所述集成式双变焦潜望式成像系统100的第二成像子系统102的最小等效焦距和第一成像子系统101的最大等效焦距之差的绝对值与第二成像子系统102的最大等效焦距和第一成像子系统101的最小等效焦距的差的绝对值之间的比值小于或等于20%。
77.更具体地,在本技术一些示例中,n2<m1,即,所述第一成像子系统101的最大等效焦距小于所述第二成像子系统102的最小等效焦距,即,在这些示例中,所述第一成像子系统101的光学变焦范围与所述第二成像子系统102的光学变焦范围不存在重叠区域。例如,在本技术一些示例中,所述第一成像子系统101的光学变焦范围为:75mm~150mm,所述第二成像子系统102的光学变焦范围为:175mm~250mm;再如,所述第一成像子系统101的光学变焦范围为:75mm~150mm,所述第二成像子系统102的光学变焦范围为:150mm~250mm。
78.在本技术另外一些示例中,m2>n2≥m1,即,所述第二成像子系统102的最大等效焦距位于所述第一成像子系统101的最小等效焦距与最大等效焦距之间,即,在这些示例中,所述第一成像子系统101的光学变焦范围与所述第二成像子系统102的光学变焦范围至少存在部分重叠区域。例如,在本技术一些示例中,所述第一成像子系统101的光学变焦范围为:75mm~150mm,所述第二成像子系统102的光学变焦范围为:125mm~250mm。
79.特别地,在本技术实施例中,n1、n2、m1与m2进一步满足关系式:80%≤(m2-m1)/(n2-n1)≤125%,即,所述第二成像子系统102的最大等效焦距与其最小等效焦距之差与所述第一成像子系统101的最大等效焦距与其最小等效焦距之差之间的比例范围为80%~125%,这样,进一步利于用于执行光学变焦功能的驱动组件的实施。
80.更优选地,在本技术一些示例中,n1、n2、m1与m2进一步满足关系式m2-m1=n2-n1,即,所述第二成像子系统102的最大等效焦距与其最小等效焦距之差等于所述第一成像子系统101的最大等效焦距与其最小等效焦距之差,这样,在进行光学变焦时,所述第一成像子系统101与所述第二成像子系统102的驱动组件的行程相接近,更利于用于执行光学变焦功能的驱动组件的实施,即,利于所述集成式双变焦潜望式成像系统100的结构设计。
81.进一步地,在本技术实施例中,所述第一光反射元件11和所述第二光反射元件12为具有光反射性能的元器件,其包括但不限于棱镜、平面镜等。并且,所述第一光反射元件11和所述第二光反射元件12被设置于所述集成式双变焦潜望式成像系统100的入光面,即,所述第一光反射元件11和所述第二光反射元件12用于接收并转折来自外界的成像光线。在一些具体的示例中,第一光反射元件11和所述第二光反射元件12被设置于所述集成式双变焦潜望式成像系统100的端部位置并朝向外界成像光线的进口处。
82.在本技术一些示例中,所述第一光反射元件11与所述第二光反射元件12可具有分体式结构,即所述第一光反射元件11与所述第二光反射元件12为分别独立的部件。当然,在本技术其他示例中,所述第一光反射元件11与所述第二光反射元件12可具有一体式结构,例如,所述第一光反射元件11与所述第二光反射元件12被同时安装于同一载体(为了做区别,将此载体定义为第一载体,图中未示意),以通过所述第一载体将所述第一光反射元件11和所述第二光反射元件12在结构上进行集成;再如,所述第一光反射元件11和所述第二光反射元件12可以是同一光反射元件的不同部分,即,所述第一光反射元件11与所述第二
光反射元件12一体结合,例如,所述第一光反射元件11与所述第二光反射元件12可以是同一反射镜的部分反射区域,通过这样的方式,使得所述第一光反射元件11和所述第二光反射元件12在结构上相集成。
83.进一步地,在本技术实施例中,所述第一透镜组21和所述第二透镜组22分别对应于所述第一光反射元件11和所述第二光反射元件12,用于接收自所述第一光反射元件11和所述第二光反射元件12反射而来的成像光线,并对此成像光线进行聚集。
84.在本技术一些示例中,所述第一透镜组21和所述第二透镜组22可分别具有一体式结构,即,所述第一透镜组21和所述第二透镜组22为一个完整的光学镜头。优选地,在本技术实施例中,所述第一透镜组21和所述第二透镜组22分别具有分体式结构,即,所述第一透镜组21和所述第二透镜组22分别包括至少二透镜组单元,以通过所述至少二透镜组单元构成所述第一透镜组21和所述第二透镜组22。
85.例如,在如图1所示意的示例中,所述第一透镜组21包括三个透镜组单元,分别为第一透镜组单元211、第二透镜组单元212和第三透镜组单元213;所述第二透镜组22包括三个透镜组单元,分别为第一透镜组单元221、第二透镜组单元222和第三透镜组单元223。相应地,用于驱动所述第一成像子系统101和用于驱动所述第二成像子系统102进行光学变焦的驱动组件(图中为示意图),可通过分别驱动所述第一透镜组21中至少二透镜组单元和所述第二透镜组22中至少二透镜组单元以实现所述第一成像子系统101和所述第二成像子系统102的光学变焦。例如,在本技术一个具体的示例中,所述驱动组件包括用于移动所述第一透镜组21中至少二透镜组单元的第一驱动机构;以及,用于移动所述第二透镜组22中至少二透镜组单元的第二驱动机构,以通过所述第一驱动机构实现所述第一成像子系统101的光学变焦和所述第二驱动机构实现所述第二成像子系统102的光学变焦。
86.当然,在本技术其他示例中,所述驱动组件还可以通过其他方式进行配置以实现所述第一成像子系统101和所述第二成像子系统102的光学变焦。例如,在本技术另外的示例中,所述驱动组件包括用于同时移动所述第一透镜组21中至少一透镜组单元和所述第二透镜组22中至少一透镜组单元的第一驱动机构,以及,同时移动所述第一透镜组21中其他至少一透镜组单元和所述第二透镜组22中其他至少一透镜组单元的第二驱动机构,也就是,在该示例中,所述第一透镜组21中至少一透镜组单元和所述第二透镜组22中至少一透镜组单元被所述第一驱动机构同时驱动,所述第一透镜组21中其他至少一透镜组单元和所述第二透镜组22中其他至少一透镜组单元被所述第二驱动机构同时驱动,以通过所述第一驱动机构和所述第二驱动机构实现所述第一成像子系统101和所述第二成像子系统102的光学变焦。
87.值得一提的是,在本技术实施例中,由于将需实现较大光学变焦范围的成像系统拆分为两个成像子系统,因此,在对所述第一成像子系统101和所述第二成像子系统102进行光学设计的过程中,所述第一成像子系统101中的光学透镜的尺寸设计,以及,所述第二成像子系统102中的光学透镜的尺寸设计仅需要考虑各自光学变焦范围的要求而无需考虑整体变焦范围的要求,因此,对于所述第一成像子系统101和所述第二成像子系统102而言,其光学透镜的尺寸都可以得以缩减,即,所述集成式双变焦潜望式成像系统100的z方向的高度尺寸和y方向上的长度尺寸都可以得以缩减。
88.进一步地,在本技术实施例中,所述第一透镜组21和所述第二透镜组22分别对应
于所述感光组件30,以使得第一透镜组21和所述第二透镜组22分别被设置于所述感光组件30的感光范围内,从而能够接收来自所述第一透镜组21或所述第二透镜组22的成像光线,以进行成像。
89.图2图示了根据本技术实施例的所述集成式双变焦潜望式成像系统100中感光组件30的示意图。如图2所示,在本技术实施例中,所述感光组件30包括线路板31、电连接于所述线路板31的第一感光芯片321和第二感光芯片322,设置于所述线路板31用于遮蔽所述第一感光芯片321和所述第二感光芯片322的至少部分非感光区域的封装部33,以及,被保持于所述感光组件30的感光路径的滤光元件34,其中,所述第一透镜组21被设置于所述第一感光芯片321的感光路径上,所述第二透镜组22被设置于所述第二感光芯片322的感光路径上。
90.图3图示了根据本技术实施例的所述集成式双变焦潜望式成像系统100中所述感光组件30的一变形实施的示意图。如图3所示,在该变形实施中,所述感光组件30包括线路板31、电连接于所述线路板31的感光芯片32,设置于所述线路板31用于遮蔽所述感光芯片32至少部分非感光区域的封装部33,以及,被保持于所述感光芯片32的感光路径的滤光元件34,其中,所述感光芯片32具有第一感光区323和第二感光区324,其中,所述第一透镜组21被设置于所述第一感光区323的感光路径上,所述第二透镜组22被设置于所述第二感光区324的感光路径上。也就是,在该示例中,所述感光组件30仅包括一片感光芯片32,所述第一透镜组21和所述第二透镜组22分别对应于所述感光芯片32的不同区域。
91.图4图示了根据本技术实施例的所述集成式双变焦潜望式成像系统100中所述感光组件30的另一变形实施的示意图。如图4所示,在该示例中,所述感光组件30包括感光芯片32和用于移动所述感光芯片32在第一位置和第二位置之间移动的驱动元件(图中未示意),其中,当所述感光芯片32被移动至所述第一位置时,所述第一透镜组21位于所述感光芯片32的感光路径上;当所述感光芯片32被移动至所述第二位置时,所述第二透镜组22位于所述感光芯片32的感光路径。也就是,在该示例中,所述感光组件30仅包括一片感光芯片32,并且,所述感光芯片32的尺寸较小无法同时覆盖所述第一透镜组21和所述第二透镜组22,相应地,通过配置所述驱动组件驱动所述感光芯片32可选择地在所述第一透镜组21的对应的第一位置和所述第二透镜组22的对应的第二位置之间移动。
92.综上,基于本技术实施例的所述集成式双变焦潜望式成像系统100被阐明,其包括两个在光学变焦性能上相互配合且在结构上被集成设置的潜望式成像子系统,以具有更强的光学变焦能力。
93.也就是,在本技术实施例中,将需实现较大光学变焦范围的成像系统拆分为两个成像子系统,从而,两个所述成像子系统能够分别设计、分别优化,从而可以简化成像系统的设计难度,并且,可以提升所述集成式双变焦潜望式成像系统100在各个有效焦距下的成像质量。
94.还有,由于将需实现较大光学变焦范围的成像系统拆分为两个成像子系统,因此,在对所述第一成像子系统101和所述第二成像子系统102进行光学设计的过程中,所述第一成像子系统101中的光学透镜的尺寸设计,以及,所述第二成像子系统102中的光学透镜的尺寸设计仅需要考虑各自光学变焦范围的要求而无需考虑整体变焦范围的要求,因此,对于所述第一成像子系统101和所述第二成像子系统102而言,其光学透镜的尺寸都可以得以
缩减,即,所述集成式双变焦潜望式成像系统100的z方向的高度尺寸和y方向上的长度尺寸都可以得以缩减。
95.示意性集成式双变焦潜望式摄像模组
96.如图5至图7所示,根据本技术实施例的集成式双变焦潜望式摄像模组被阐明,其中,所述集成式双变焦潜望式摄像模组110采用如上所述的集成式光变焦成像系统的光学设计方案。
97.更具体地,如图5至图7所示,在本技术实施例中,所述集成式双变焦潜望式摄像模组110,包括壳体40,以及,被封装于所述壳体40内的所述集成式双变焦潜望式成像系统100。具体地,在本技术实施例中,基于所述集成式双变焦潜望式成像系统100的光学设计特征,所述壳体40在其长度方向上配置有三个安装腔,分别为第一安装腔41、第二安装腔42和第三安装腔43,所述壳体40具有连通于所述第一安装腔41和所述第二安装腔42的第一光窗,以及,连通所述第二安装腔42与所述第三安装腔43之间的第二光窗,其中,所述集成式双变焦潜望式成像系统100的第一光反射元件11和第二光反射元件12被设置于所述第一安装腔41、所述集成式双变焦潜望式成像系统100的第一透镜组21和第二透镜组22被设置于所述第二安装腔42、所述集成式双变焦潜望式成像系统100的感光组件30被设置于所述第三安装腔43。
98.其中,在本技术实施例中,所述第一光反射元件11、所述第二光反射元件12、所述第一透镜组21、所述第二透镜组22和所述感光组件30安装于所述壳体40的位置关系满足:所述第一透镜组21透过所述第一光窗对应于所述第一光反射元件11,所述第一透镜组21通过所述第二光窗被设置于所述感光组件30的感光范围内,以通过所述第一光反射元件11、所述第一透镜组21和所述感光组件30构成第一成像子系统101;所述第二透镜组22透过所述第一光窗对应于所述第二光反射元件12,所述第二透镜组22通过所述第二光窗被设置于所述感光组件30的感光范围内,以通过所述第二光反射元件12、所述第二透镜组22和所述感光组件30构成第二成像子系统102。
99.进一步地,如图5至图7所示,在本技术实施例中,所述集成式双变焦潜望式摄像模组110进一步包括设置于所述第二安装腔42内且用于移动所述第一成像子系统101中所述第一透镜组21的至少部分光学透镜以进行光学变焦以及移动所述第二成像子系统102中所述第二透镜组22的至少部分光学透镜以进行光学变焦的驱动组件60。
100.特别地,在本技术实施例中,所述第一成像子系统101的光学变焦的范围为n1≤efl1≤n2,efl1表示所述第一成像子系统101的第一等效焦距;所述第二成像子系统102的光学变焦的范围为m1≤efl2≤m2,efl2表示所述第二成像子系统102的第二等效焦距,其中,m2>n2,m1>n1,相应地,所述集成式光变焦潜望式摄像模组便能够实现等效焦距在n1~m2之间的变化,即,所述集成式光变焦潜望式摄像模组能够实现等效焦距可以在n1~m2中任意一值,这样,所述第一成像子系统101与所述第二成像子系统102在光学变焦性能上相互配合,以不仅能够扩展所述集成式双变焦潜望式成像系统100的整体光学变焦范围,而且,能够使得所述集成式双变焦潜望式成像系统100在任何等效焦距下都具有相对较高的成像质量。
101.并且,为了便于用于执行光学变焦功能的驱动组件60的实施,在本技术实施例中,n1、n2、m1与m2满足关系:|m1-n2|/|m2-n1|≤20%。也就是,在本技术实施例中,所述集成式
双变焦潜望式成像系统100的第二成像子系统102的最小等效焦距和第一成像子系统101的最大等效焦距之差与第二成像子系统102的最大等效焦距和第一成像子系统101的最小等效焦距的差的比值小于或等于20%。
102.更具体地,在本技术一些示例中,n2<m1,即,所述第一成像子系统101的最大等效焦距小于或等于所述第二成像子系统102的最小等效焦距,即,在这些示例中,所述第一成像子系统101的光学变焦范围与所述第二成像子系统102的光学变焦范围不存在重叠区域。例如,在本技术一些示例中,所述第一成像子系统101的光学变焦范围为:75mm~150mm,所述第二成像子系统102的光学变焦范围为:175mm~250mm;再如,所述第一成像子系统101的光学变焦范围为:75mm~150mm,所述第二成像子系统102的光学变焦范围为:150mm~250mm。
103.在本技术另外一些示例中,m2>n2≥m1,即,所述第二成像子系统102的最大等效焦距位于所述第一成像子系统101的最小等效焦距与最大等效焦距之间,即,在这些示例中,所述第一成像子系统101的光学变焦范围与所述第二成像子系统102的光学变焦范围至少存在部分重叠区域。例如,在本技术一些示例中,所述第一成像子系统101的光学变焦范围为:75mm~150mm,所述第二成像子系统102的光学变焦范围为:125mm~250mm。
104.特别地,在本技术实施例中,n1、n2、m1与m2进一步满足关系式:80%≤(m2-m1)/(n2-n1)≤125%,即,所述第二成像子系统102的最大等效焦距与其最小等效焦距之差与所述第一成像子系统101的最大等效焦距与其最小等效焦距之差之间的比例范围为80%~125%,这样,进一步利于用于执行光学变焦功能的驱动组件60的实施。
105.更优选地,在本技术一些示例中,n1、n2、m1与m2进一步满足关系式m2-m1=n2-n1,即,所述第二成像子系统102的最大等效焦距与其最小等效焦距之差等于所述第一成像子系统101的最大等效焦距与其最小等效焦距之差,这样,在进行光学变焦时,所述第一成像子系统101与所述第二成像子系统102的驱动组件60的行程相接近,更利于用于执行光学变焦功能的驱动组件60的实施,即,利于所述集成式光变焦潜望式摄像模组的结构设计。
106.如图5至图7所示,在本技术实施例中,所述第一光反射元件11和所述第二光反射元件12被实施为具有光反射功能的棱镜,其具有入光面、反射面和出光面,其中,在本技术实施例中,所述棱镜的入光面对应于所述壳体40的入光口,以用于接收来自外界的成像光线并将所述成像光线进行90
°
转折至所述第一透镜组21和所述第二透镜组22。当然,应可以理解,在本技术其他示例中,所述第一光反射元件11和所述第二光反射元件12还可以被实施为其他具有光反射性能的元器件,例如,反射镜,对此,并不为本技术所局限。
107.并且,在本技术实施例中,所述第一光反射元件11与所述第二光反射元件12可具有分体式结构,即所述第一光反射元件11与所述第二光反射元件12为分别独立的部件。当然,在本技术其他示例中,所述第一光反射元件11与所述第二光反射元件12可具有一体式结构。例如,在如图5至图7所示意的示例中,所述第一光反射元件11与所述第二光反射元件12被同时安装于同一载体(为了做区别,将此载体定义为第一载体51),以通过所述第一载体51将所述第一光反射元件11和所述第二光反射元件12在结构上进行集成,即,所述集成式双变焦潜望式摄像模组110,进一步包括第一载体51,所述第一光反射元件11和所述第二光反射元件12被安装于所述第一载体51。应可以理解,所述第一光反射元件11、所述第二光反射元件12和所述第一载体51形成模块化结构,从而在安装所述第一光反射元件11和所述
第二光反射元件12的过程中,所述第一光反射元件11与所述第二光反射元件12相对位置关系保持恒定,并且,所述第一安装腔41的尺寸和形状可与所述第一载体51的形状与尺寸相适配,以提高组装和配合精度。
108.当然,在本技术其他示例中,所述第一光反射元件11和所述第二光反射元件12还可以通过其他方式实现在结构上进行集成,例如,所述第一光反射元件11和所述第二光反射元件12可以是同一光反射元件的不同部分,即,所述第一光反射元件11与所述第二光反射元件12一体结合,例如,所述第一光反射元件11与所述第二光反射元件12可以是同一反射镜的部分反射区域,通过这样的方式,使得所述第一光反射元件11和所述第二光反射元件12在结构上相集成。
109.进一步地,在本技术实施例中,所述第一透镜组21和所述第二透镜组22分别对应于所述第一光反射元件11和所述第二光反射元件12,用于接收自所述第一光反射元件11和所述第二光反射元件12反射而来的成像光线,并对此成像光线进行聚集。
110.在本技术实施例中,所述第一透镜组21和所述第二透镜组22可分别具有一体式结构,即,所述第一透镜组21和所述第二透镜组22为一个完整的光学镜头。优选地,在本技术实施例中,所述第一透镜组21和所述第二透镜组22分别具有分体式结构,即,所述第一透镜组21和所述第二透镜组22分别包括至少二透镜组单元,以通过所述至少二透镜组单元构成所述第一透镜组21和所述第二透镜组22,如图5至图7所示。
111.例如,在如图5至图7所示意的示例中,所述第一透镜组21包括三个透镜组单元,分别为第一透镜组单元211、第二透镜组单元212和第三透镜组单元213,其中,所述第一透镜组单元211邻近于所述第一光反射元件11,所述第三透镜组单元213邻近于所述感光组件30;所述第二透镜组22包括三个透镜组单元分别为第一透镜组单元221、第二透镜组单元222和第三透镜组单元223,其中,所述第一透镜组单元221邻近于所述第一光反射元件11,所述第三透镜组单元223邻近于所述感光组件30。
112.相应地,用于驱动所述第一成像子系统101和用于驱动所述第二成像子系统102进行光学变焦的驱动组件60,可通过分别驱动所述第一透镜组21中至少二透镜组单元和所述第二透镜组22中至少二透镜组单元以实现所述第一成像子系统101和所述第二成像子系统102的光学变焦。
113.在如图5至图7所示意的实施例中,所述驱动组件60包括用于移动所述第一透镜组21中至少二透镜组单元的第一驱动机构61;以及,用于移动所述第二透镜组22中至少二透镜组单元的第二驱动机构62,以通过所述第一驱动机构61实现所述第一成像子系统101的光学变焦和所述第二驱动机构62实现所述第二成像子系统102的光学变焦。
114.更具体地,所述第一驱动机构61包括用于驱动所述第一透镜组21中第二透镜组单元212的第一驱动单元、以及,用于驱动所述第一透镜组21中第三透镜组单元213的第二驱动单元;相应地,当所述第一驱动单元驱动所述第二透镜组单元212进行移动时,所述第一成像子系统101的等效焦距发生改变,进而,所述第二驱动单元驱动所述第三透镜组单元213进行光学对焦,以确保所述第一成像子系统101的成像质量,通过这样的方式,实现所述第一成像子系统101的光学变焦。
115.所述第二驱动机构62包括用于驱动所述第二透镜组22中第二透镜组单元222的第三驱动单元、以及,用于驱动所述第二透镜组22中第三透镜组单元223的第四驱动单元。相
应地,当所述第三驱动单元驱动所述第二透镜组单元222进行移动时,所述第二成像子系统102的等效焦距发生改变,进而,所述第四驱动单元驱动所述第三透镜组单元223进行光学对焦,以确保所述第二成像子系统102的成像质量,通过这样的方式,实现所述第二成像子系统102的光学变焦。
116.在具体实施中,所述第一驱动单元、所述第二驱动单元、所述第三驱动单元和所述第四驱动单元可同时工作也可以不同时工作,即,当所述第一成像子系统101进行光学变焦时,所述第二成像子系统102可以不进行光学变焦。还值得一提的是,所述第一驱动单元、所述第二驱动单元、所述第三驱动单元和所述第四驱动单元的具体类型并不为本技术所局限,其包括但不限于音圈马达、压电马达、sma马达等。
117.为了缩减所述集成式双变焦潜望式摄像模组110在其x轴方向上的尺寸,在本技术实施例中,如图5至图7所示,所述壳体40进一步包括设置于所述第二安装腔42内以将所述第二安装腔42划分为第一安装室和第二安装室的隔板44,其中,所述第一透镜组21被设置于所述第一安装室,所述第二透镜组22被安装于所述第二安装室,这样可以缩减所述第一成像子系统101与所述第二成像子系统102之间的间距。如图5至图7所示,在本技术实施例中,至少部分所述第一驱动机构61被安装于所述隔板44的第一侧;至少部分所述第二驱动机构62被安装于所述隔板44的相对于所述第一侧的第二侧。也就是,在本技术实施例中,所述第一驱动机构61和所述第二驱动机构62共同安装载体,以缩减所述集成式双变焦潜望式摄像模组110在其x轴方向上的尺寸。
118.值得一提的是,在本技术一些示例中,所述第一驱动单元和所述第二驱动单元还可以被实施为同一驱动器,所述第三驱动单元和所述第四驱动单元还可以被实施为同一驱动器,以此来进一步缩减所述集成式双变焦潜望式摄像模组110的整体体积尺寸。
119.当然,在本技术其他示例中,所述第一驱动机构61的第一驱动单元和第二驱动单元、以及,所述第二驱动机构62的第三驱动单元和第四驱动单元也可以不借助所述隔板44进行安装。例如,在如图8所示意的示例中,所述第一驱动机构61的第一驱动单元和第二驱动单元被安装于所述壳体40的内侧壁,所述第二驱动机构62的第三驱动单元和第四驱动单元被安装于所述壳体40的另一侧的内壁上,对此,并不为本技术所局限。
120.图9至图11图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组110的另一变形实施的示意图。如图9至图11所示,在该示例中,所述集成式双变焦潜望式摄像模组110进一步包括设置于所述第二安装腔42内的第二载体52和第三载体53,其中,所述第一透镜组21中至少一透镜组单元和所述第二透镜组22中至少一透镜组单元被安装于所述第二载体52,以及,所述第一透镜组21中其他至少一透镜组单元和所述第二透镜组22中其他至少一透镜组单元被安装于所述第三载体53。例如,在如图9至图11所示意的示例中,所述第一透镜组21的第二透镜组单元212和所述第二透镜组22的第二透镜组单元222被安装于所述第二载体52以使得所述第一透镜组21的第二透镜组单元212和所述第二透镜组22的第二透镜组单元222具有一体式模块化结构,以及,所述第一透镜组21的第三透镜组单元213和所述第二透镜组22的第三透镜组单元223被安装于所述第三载体53以使得所述第一透镜组21的第三透镜组单元213和所述第二透镜组22的第三透镜组单元223具有一体式模块化结构。进一步地,在该示例中,所述驱动组件60包括用于移动所述第二载体52以同时带动所述第一透镜组21中至少一透镜组单元和所述第二透镜组22中至少一透镜组单元的第一驱
动机构61,以及,用于移动所述第三载体53以同时带动所述第一透镜组21中其他至少一透镜组单元和所述第二透镜组22中其他至少一透镜组单元的第二驱动机构62,即,所述驱动组件60包括用于移动所述第二载体52以同时带动所述第一透镜组21中第二透镜组单元212和所述第二透镜组22中第二透镜组单元222的第一驱动机构61,以及,用于移动所述第三载体53以同时带动所述第一透镜组21中第三透镜组单元213和所述第二透镜组22中第三透镜组单元223的第二驱动机构62。
121.也就是说,在如图9至图11所示意的示例中,所述第一透镜组21中至少二透镜组单元和所述第二透镜组22中至少二透镜组单元共同驱动器,这样,一方面可以提高所述第一透镜组21和所述第二透明组的安装精度,另一方面,可以缩减所述壳体40与所述第一成像子系统101与所述第二成像子系统102之间的间距,以缩减所述集成式双变焦潜望式摄像模组110在其x方向上的尺寸配置。
122.值得一提的是,如前所述,当所述第一成像子系统101和所述成像子系统的参数n1、n2、m1与m2满足关系式:80%≤(m2-m1)/(n2-n1)≤125%,即,所述第二成像子系统102的最大等效焦距与其最小等效焦距之差与所述第一成像子系统101的最大等效焦距与其最小等效焦距之差之间的比例范围为80%~125%,这样,进一步利于用于执行光学变焦功能的驱动组件60的实施。更进一步地,当当所述第一成像子系统101和所述成像子系统的参数n1、n2、m1与m2满足关系式:m2-m1=n2-n1时,即,所述第二成像子系统102的最大等效焦距与其最小等效焦距之差等于所述第一成像子系统101的最大等效焦距与其最小等效焦距之差。当满足上述关系时,在进行光学变焦时,所述第一成像子系统101与所述第二成像子系统102的驱动组件60的行程相接近,因此,在该示例中,所述第一驱动机构61和所述第二驱动机构62来同时移动所述第一透镜组21中的透镜组单元和所述第二透镜组22中的透镜组单元能够适配地满足行程相接近的设计要求。
123.还值得一提的是,为了提高所述集成式双变焦潜望式摄像模组110的安装精度,在如图9至图11所示意的示例中,还可以进一步提供一第四载体54,以通过所述第四载体54将所述第一透镜组21的第一透镜组单元211和所述第二透镜组22的第一透镜组单元221在结构上集成地配置,对此,并不为本技术所局限。
124.图12图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组110中感光组件30的示意图。如图12所示,在本技术实施例中,所述感光组件30包括线路板31、电连接于所述线路板31的第一感光芯片321和第二感光芯片32,设置于所述线路板31用于遮蔽所述第一感光芯片321和所述第二感光芯片32的至少部分非感光区域的封装部33,以及,被保持于所述感光组件30的感光路径上的滤光元件34,其中,所述第一透镜组21被设置于所述第一感光芯片321的感光路径上,所述第二透镜组22被设置于所述第二感光芯片32的感光路径上。
125.图13图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组110的又一变形实施的示意图。如图13所示,在该变形实施中,所述感光组件30包括线路板31、电连接于所述线路板31的感光芯片32,设置于所述线路板31用于遮蔽所述感光芯片32至少部分非感光区域的封装部33,以及,被保持于所述感光组件30的感光路径上的滤光元件34,其中,所述感光芯片32具有第一感光区323和第二感光区324,其中,所述第一透镜组21被设置于所述第一感光区323的感光路径上,所述第二透镜组22被设置于所述第二感光区324的感光路
径上。也就是,在该示例中,所述感光组件30仅包括一片感光芯片32,所述第一透镜组21和所述第二透镜组22分别对应于所述感光芯片32的不同区域。
126.图14图示了根据本技术实施例的所述集成式双变焦潜望式摄像模组110的又一变形实施的示意图。如图14所示,在该示例中,所述感光组件30包括感光芯片32和用于移动所述感光芯片32在第一位置和第二位置之间移动的驱动元件(图中为示意图),其中,当所述感光芯片32被移动至所述第一位置时,所述第一透镜组21位于所述感光芯片32的感光路径上;当所述感光芯片32被移动至所述第二位置时,所述第二透镜组22位于所述感光芯片32的感光路径。也就是,在该示例中,所述感光组件30仅包括一片感光芯片32,并且,所述感光芯片32的尺寸较小无法同时覆盖所述第一透镜组21和所述第二透镜组22,相应地,通过配置所述驱动组件60驱动所述感光芯片32可选择地在所述第一透镜组21的对应的第一位置和所述第二透镜组22的对应的第二位置之间移动。
127.综上,基于本技术实施例的所述潜望式摄像模组被阐明,其包括两个在光学变焦性能上相互配合且在结构上被集成设置的潜望式成像子系统,以具有更强的光学变焦能力。
128.也就是,在本技术实施例中,将需实现较大光学变焦范围的成像系统拆分为两个成像子系统,从而,两个所述成像子系统能够分别设计、分别优化,从而可以简化成像系统的设计难度,并且,可以提升所述集成式双变焦潜望式摄像模组110在各个有效焦距下的成像质量。
129.还有,由于将需实现较大光学变焦范围的成像系统拆分为两个成像子系统,因此,在对所述第一成像子系统101和所述第二成像子系统102进行光学设计的过程中,所述第一成像子系统101中的光学透镜的尺寸设计,以及,所述第二成像子系统102中的光学透镜的尺寸设计仅需要考虑各自光学变焦范围的要求而无需考虑整体变焦范围的要求,因此,对于所述第一成像子系统101和所述第二成像子系统102而言,其光学透镜的尺寸都可以得以缩减,即,所述集成式双变焦潜望式摄像模组110的z方向的高度尺寸和y方向上的长度尺寸都可以得以缩减。
130.示意性多摄摄像模组
131.图15图示了根据本技术实施例的多摄摄像模组的示意图。
132.如图15所示,根据本技术实施例的多摄摄像模组200包括第一摄像模组210,以及,如上所述的集成式双变焦潜望式摄像模组110。特别地,在本技术实施例中,所述第一摄像模组210具有固定的第一等效焦距a,所述集成式双变焦潜望式摄像模组110具有光学变焦的性能,即,其具有可变的等效焦距。
133.特别地,在本技术一具体示例中,n1=3a,n2=7a,m1=6a,m2=10a,也就是,在所述集成式双变焦潜望式摄像模组110中,其第一成像子系统101的光学变焦范围为所述第一摄像模组210的等效焦距的3倍至7倍,其第二成像子系统102的光学变焦范围为所述第一摄像模组210的等效焦距的6倍至10倍。也就是,所述集成式双变焦潜望式摄像模组110的可调等效焦距范围为3a~10a。
134.值得一提的是,在该示例中,“=”并不意味着左右两边的变量完全相等,即,在该示例中,n1=3a并不标识n1完全等于3a,当n1=3a
±
3%a都可以称之为n1=3a,以此可类推其他参数范围的限定。
135.在本技术另一具体示例中,n1=3a,n2=6a,m1=7a,m2=10a,也就是,也就是,在所述集成式双变焦潜望式摄像模组110中,其第一成像子系统101的光学变焦范围为所述第一摄像模组210的等效焦距的3倍至6倍,其第二成像子系统102的光学变焦范围为所述第一摄像模组210的等效焦距的7倍至10倍。也就是,所述集成式双变焦潜望式摄像模组110的可调等效焦距范围为3a~10a。
136.同样地,在该示例中,“=”并不意味着左右两边的变量完全相等,即,在该示例中,n1=3a并不标识n1完全等于3a,当n1=3a
±
3%a都可以称之为n1=3a,以此可类推其他参数范围的限定。
137.示意性电子设备
138.图16图示了根据本技术实施例的电子设备的立体示意图。
139.如图16所示,根据本技术实施例的所述电子设备300包括电子设备主体310和被组装于所述电子设备主体310的如上所述的集成式双变焦潜望式摄像模组110。在具体实施中,所述集成式双变焦潜望式摄像模优选地被配置于所述电子设备300主体的背面,以被配置为后置摄像模组,以所述集成式双变焦潜望式摄像模采集图像。
140.图17图示了根据本技术实施例的电子设备300的立体示意图。
141.如图17所示,根据本技术实施例的所述电子设备300包括电子设备主体310和被组装于所述电子设备主体310的如上所述的多摄摄像模组200。在具体实施中,所述多摄摄像模组200优选地被配置于所述电子设备300主体的背面,以被配置为后置摄像模组,以所述多摄摄像模组200采集图像。
142.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
