1.本发明涉及海洋装备技术领域,具体涉及一种长距离供水管道检测机器人。
背景技术:
2.为了满足日益增长的城市供水需求,我国建设了大量长距离供水管道工程,这些工程对于保障城市的供水安全、工业发展和社会稳定起到了重要的作用。随着运营时间增长,这些管道工程也出现了局部的变形、破裂、坍塌、侵蚀、溶蚀、突水突泥等危险状况,为了保障工程安全需要定量、及时、全面覆盖对管道工程的结构安全进行评价。传统技术方法主要是人工通过目测、皮尺、罗盘等工具逐一核查结构安全隐患,存在低效、费力、耗时、覆盖面窄等缺点,同时传统方法受制于现场检查人员的知识和经验判断等主观能力的限制,无法胜任定量、及时、全面覆盖的结构安全评价任务。因此需要研制一种可以搭载多种传感器,并且在结构上能够保持自身姿态平稳的管道检测机器人,完成机器人在管道内部的准确定位,并将管道检测信息与管道位置准确关联,为长距离供水管道的安全运行提供强力保障。
3.目前,对于管道的结构安全检测机器人以蠕动行走为主。该方案主要由蠕动元件组成,整体结构呈正方形,体积较小且质量较轻。该管道机器人的移动方式是通过蠕动元件进行控制,实现管道机器人在管道内的移动。但是该方案的蠕动元件多达12个,限制了管道机器人的移动速度,且增加了该管道机器人的控制复杂度。
4.现有技术主要有两个缺点,其一,在很大程度上不能满足现代供水管道工程的运行管理要求,无法胜任定量、及时、全面覆盖的结构安全评价任务。其二,不能完成在管道内部的准确定位,无法将管道信息与管道位置准确关联。
技术实现要素:
5.有鉴于此,为了解决现有技术中的上述问题,本发明提出一种长距离供水管道检测机器人,采用独立悬挂 平衡悬挂 六轮独立驱动的越野能力强的工程机械底盘结构,以适应湿滑、崎岖的管道环境;结合激光slam、惯性测量单元、里程计、缆绳长度测量等多传感器数据,完成机器人在管道内部的准确定位,将管道检测信息与管道位置准确关联。
6.本发明通过以下技术手段解决上述问题:
7.一种长距离供水管道检测机器人,包括:
8.机器人本体;
9.独立悬挂,与机器人本体连接;
10.前轮,采用独立悬挂连接在机器人本体的前端两侧;
11.平衡悬挂,与机器人本体连接;
12.中轮,采用平衡悬挂连接在机器人本体的中端两侧;
13.后轮,采用平衡悬挂连接在机器人本体的后端两侧;
14.缆绳,与机器人本体尾部连接,内部设置有数据线和动力线;
15.支架,通过铰链固定在机器人本体上;
16.电动缸,一端与机器人本体连接,另一端与支架连接,用于支撑支架;
17.相机,安装在支架上,用来采集供水管道内的图像信息,并通过缆绳内部的数据线传送到地面,通过调节电动缸的伸长量对相机的位置进行调节;
18.惯性测量单元,固定在机器人本体上,包括速率陀螺、线加速度计和机载计算机;速率陀螺和线加速度计分别用来测量运载体的角运动信息和线运动信息,机载计算机根据这些测量信息解算出运载体的航向、姿态、速度和位置信息;
19.激光雷达,安装在机器人本体的最前端,结合惯性测量单元、缆绳长度信息用以实时构建管道内部地图、实时确定自身在地图的位置,完成机器人在复杂管道环境中的高精度、高稳定性自主定位。
20.进一步地,所述惯性测量单元包括三个速率陀螺、三个线加速度计和机载计算机。
21.进一步地,所述长距离供水管道检测机器人还包括安装在前轮上的编码器,用于实时检测驱动电机的过载状态,当编码器的脉冲频率小于控制脉冲频率时,便判定电机出现了失步,进而推断出电机发生了过载现象。
22.进一步地,所述编码器为光电编码器或磁性编码器。
23.进一步地,所述长距离供水管道检测机器人还包括安装在机器人本体上的里程计,用于测量机器人的行程。
24.与现有技术相比,本发明的有益效果至少包括:
25.1、采用六轮全驱方式,在传动机构配合下,提供动力输出,可完成管道检测机器人前进、后退、转弯、加减速等系列动作;
26.2、悬挂部分借鉴了越野能力强的工程车辆所采用的悬挂方式,前轮采用独立悬挂,中轮和后轮采用平衡悬挂,保证了即使崎岖坑洼的地面车轮也能与地面保持良好的接触,从而适应管道内部恶劣环境;
27.3、采用远程遥控和局部自主调整相结合的控制方式,自动保持自身姿态平稳;
28.4、结合激光slam、惯性测量单元等多传感器数据,完成机器人在管道内部的准确定位,将管道检测信息与管道位置准确关联。
附图说明
29.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
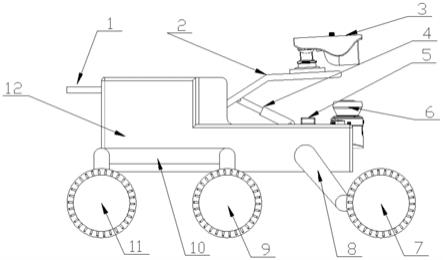
30.图1是本发明长距离供水管道检测机器人的正视图;
31.图2是本发明长距离供水管道检测机器人的侧视图;
32.附图标记说明:
33.1-缆绳,2-支架,3-相机,4-电动缸,5-惯性测量单元,6-激光雷达,7-前轮,8-独立悬挂,9-中轮,10-平衡悬挂,11-后轮,12-机器人本体。
具体实施方式
34.为使本发明的上述目的、特征和优点能够更加明显易懂,下面将结合附图和具体的实施例对本发明的技术方案进行详细说明。需要指出的是,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.实施例
36.随着供水管道工程运营时间增长,这些管道工程也出现了局部的变形、破裂、坍塌、侵蚀、溶蚀、突水突泥等危险状况,为了满足现代供水管道工程的安全运行管理要求,需要定量、及时、全面覆盖对管道工程的结构安全进行评价。本发明提供的长距离供水管道检测机器人采用独立悬挂 平衡悬挂 六轮独立驱动的具有较强越野能力的工程机械底盘结构,以适应湿滑、崎岖的管道环境,采用远程遥控和局部自主调整相结合的控制方式,自动保持自身姿态的平稳。结合激光slam、惯性测量单元等多传感器数据完成机器人在管道内部的准确定位,将管道检测信息与管道位置准确关联。
37.如图1、图2所示,本发明提供的长距离供水管道检测机器人,采用六轮全驱方式,在传动机构配合下,提供动力输出,可完成管道检测机器人前进、后退、转弯、加减速等系列动作。包括缆绳1、支架2、相机3、电动缸4、惯性测量单元5、激光雷达6、前轮7、独立悬挂8、中轮9、平衡悬挂10、后轮11和机器人本体12,悬挂部分借鉴了越野能力强的工程车辆所采用的悬挂方式,前轮7采用独立悬挂8,中轮9和后轮11采用平衡悬挂10,保证了即使崎岖坑洼的地面车轮也能与地面保持良好的接触,从而适应管道内部恶劣环境。具有良好的防腐、防水性能,可开展涉水作业。支架2通过铰链固定在机器人本体12上,由电动缸4支撑,相机3安装在支架2上,用来采集供水管道内的图像信息,并通过缆绳1内部的数据线传送到地面,可以通过调节电动缸4的伸长量对相机3的位置进行调节。惯性测量单元5固定在机器人本体12上,由三个速率陀螺、三个线加速度计和机载计算机组成,速率陀螺和线加速度计分别用来测量运载体的角运动信息和线运动信息,机载计算机根据这些测量信息解算出运载体的航向、姿态、速度和位置信息。激光雷达6安装在检测机器人本体12的最前端,结合惯性测量单元、机器人缆绳长度等信息用以实时构建管道内部地图、实时确定自身在地图的位置,完成机器人在复杂管道环境中的高精度、高稳定性自主定位。
38.管道检测机器人通过缆绳1与地面控制站连接,通过缆绳的动力线为机器人提供动力,机器人所采集到的图像信息、定位传感器数据等通过缆绳内部的数据线传送到地面,地面操作人员通过缆绳内部的数据线发送控制指令,实现对机器人的遥控操作。缆绳1存储于手动或电动控制的地面滚筒绞车内,通常带有自动排缆和张力控制结构,根据隧道检测机器人的作业需求自动有序收放缆绳1。管道检测机器人在控制方式上采用远程遥控和局部自主调整相结合的控制方式,能够自动保持自身姿态平稳。
39.管道检测机器人搭载了用于自身定位的激光雷达6,实时构建管道内部地图、并实时确定自身在地图的位置,并结合惯性测量单元5采用多传感器融合技术,在不需要辅助定位设备的前提下,完成机器人在复杂管道环境中的高精度、高稳定性自主定位。
40.管道内部的状况复杂且难以预料,因此极容易发生倾斜、偏转等情况,严重时甚至发生倾覆,使得机器人无法继续正常工作。此时如果对机器人姿态不能进行及时检测,则地面上的操作人员将无法获知这一情况并做出相应处理。为了在检测过程中实时检测驱动电
机的过载状态,机器人采用了安装在移动载体主动轮上的光电编码器或磁性编码器等,当编码器的脉冲频率小于控制脉冲频率时,便可以判定电机出现了失步,进而推断出电机发生了过载现象。
41.为了测量机器人的行程,还在机器人本体上安装有里程计,使工作人员直观地感受机器人行驶的距离。
42.本发明提供的长距离供水管道检测机器人,基本内容是采用六轮驱动方式,其中前轮采用独立悬挂,中后轮采用平衡悬挂。机器人采用远程遥控和局部自主调整相结合的控制方式,自动保持自身姿态平稳。管道检测机器人包含运动底盘和搭载装备两个部分,运动底盘搭载了驱动机构,悬挂以及运动控制系统。采用六轮全驱方式,在传动机构配合下,提供动力输出,可完成管道检测机器人前进、后退、转弯、加减速等系列动作。悬挂部分借鉴了越野能力强的工程车辆所采用的悬挂方式,前轮采用独立悬挂,中轮和后轮采用平衡悬挂,保证了即使崎岖坑洼的地面车轮也能与地面保持良好的接触,从而适应管道内部恶劣环境。并搭载激光雷达、惯性测量单元、相机等多种传感器,以完成机器人在管道内部的准确定位,将管道检测信息与管道位置准确关联。
43.本发明管道检测机器人采用六轮驱动方式,其中前轮采用独立悬挂,中后轮采用平衡悬挂,保证了即使崎岖坑洼的地面车轮也能与地面保持良好的接触,以适应管道内部复杂、恶劣的环境。通过搭载的激光雷达、惯性测量单元等传感器采集隧道内的环境数据,完成机器人在复杂管道环境中的高精度、高稳定性自主定位。
44.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。