1.本发明涉及测量测试技术领域,具体涉及一种基于双半径解算的火箭推进剂液位光学测量方法。
背景技术:
2.推进剂液位精确测量技术对提高火箭的运载能力具有重要意义。在火箭发动机工作状态下精确地实时测量每个储箱中的推进剂液位,可以调节氧化剂和燃料的质量流量,最终大幅减少冗余推进剂量,优化火箭运载能力,提高火箭总体性能。并为后续发射任务优化燃烧混合比及氧化剂和燃料初始加注量提供参考。
3.液氢、液氧、液化天然气(lng)凭借其洁净、高燃烧效率等优势,已广泛应用于国内外运载火箭。低温推进剂具有密度小、沸点低、易汽化等特点,液位测量条件特殊,液位监测、测量困难。目前低温液体液位监测和测量的手段很多,最常用的有电容法、差压法和电阻法,新的方法有雷达法、射频导纳法、热式测量法、超声波法、光纤法和光学测量法等。
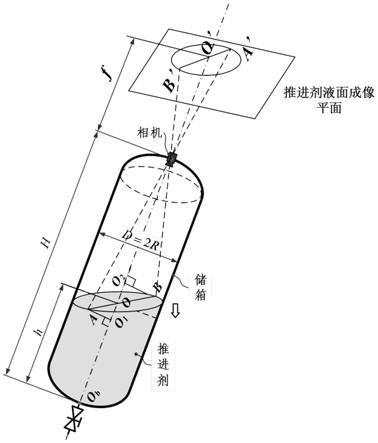
4.光学测量法利用推进剂液面的光学成像对液位进行判读,具有非接触、适应性强、安装便利等特点。其基本测量原理参见附图1,利用安装于储箱顶部的光学相机对推进剂液面进行成像,根据中心透视投影规律,在推进剂加注过程中,随着液位上升,液面在相机中的成像逐渐增大;在发动机工作过程中,随着液位下降,液面在相机中的成像逐渐减小。根据液面成像的大小可以解算出对应的液位高度h:
[0005][0006]
其中,r为储箱横截面圆的半径,h为相机安装位置距离储箱底部的高度,f为相机镜头焦距,r
′
为液面在相机中所成圆形图像的半径。上述解算方法中仅涉及到液面在相机中所成圆形图像的一个半径r
′
,因此称其为“单半径”解算方法。
[0007]
相比附图1所示的基本测量原理,液位光学测量系统的实际工作状态更为复杂。不管是推进剂加注过程还是箭体飞行过程,箭体姿态的改变都可能引起推进剂液面相对储箱轴线发生倾斜,使液面形状由圆形变为椭圆,并进一步导致液面在相机中的成像发生畸变,从而导致测量误差。
技术实现要素:
[0008]
本发明是为了解决火箭推进剂储箱液面倾斜时液位高度测量的问题,提供一种基于双半径解算的火箭推进剂液位光学测量方法,利用液面成像中任意两个夹角为π的半径进行液位高度解算,其优势在于,双半径解算方法得到的液位测量结果不受液面倾斜的影响,该方法对于提高箭上液位光学测量精度具有重要指导意义。
[0009]
本发明提供一种基于双半径解算的火箭推进剂液位光学测量方法,包括如下步骤:
[0010]
s1、组装相机:将相机安装在储箱顶部,使相机的视轴与储箱轴线重合,储箱为圆
柱形;
[0011]
s2、成像:相机对火箭推进剂液面进行拍摄,得到推进剂液面成像;
[0012]
s3、单一半径解算:在推进剂液面成像中选取半径o’a’,其中,o’点为储箱轴线在推进剂液面成像平面上的投影点,o’a’长度为r1’
,根据成像规律得到推进剂液面高度h为:
[0013][0014]
其中,h为相机距离储箱底部的安装高度,f为相机镜头焦距,r为储箱横截面半径,a’在推进剂液面上对应点为a点,推进剂液面与储箱轴线的交点为o点,a点在储箱轴线上的垂线交点为o1且o1点位于o点下方,
△
h为oo1的长度;
[0015]
s4、双半径解算:火箭运行时,
△
h不为零,为了将
△
h消除,在推进剂液面成像中选取与半径o’a’夹角为π的半径o’b’,o’b’长度为r2’
,根据成像规律得到推进剂液面高度h为:
[0016][0017]
其中,b’在推进剂液面上对应点为b点,推进剂液面与储箱轴线的交点为o点,b点在储箱轴线上的垂线交点为o2且o2点位于o点上方,oo2的长度同样为
△
h;
[0018]
s5、获得液面高度h:将步骤s3与步骤s4的公式相加,消除
△
h,得到推进剂液面高度h为:
[0019][0020]
并计算得到推进剂液面高度h。
[0021]
本发明所述的一种基于双半径解算的火箭推进剂液位光学测量方法,步骤s3包括:
[0022]
s31、在推进剂液面成像中选取半径o’a’,根据成像规律得到o’a’在推进剂液面上的半径oa;
[0023]
s32、从a点做与储箱轴线的垂线,得到垂线段o1a,并且线段oa与线段o1a在推进剂液面成像上的投影均为线段o’a’;
[0024]
s33、根据成像规律得到:
[0025][0026]
其中,ob为储箱轴线与储箱的底部的交点;
[0027]
s34、将o1ob=h
‑△
h代入步骤s33中,得到推进剂液面高度h为:
[0028][0029]
本发明所述的一种基于双半径解算的火箭推进剂液位光学测量方法,步骤s4包括:
[0030]
s41、在推进剂液面成像中选取与半径o’a’夹角为π的半径o’b’,根据成像规律得
到o’b’在推进剂液面上的半径ob;
[0031]
s42、从a点做与储箱轴线的垂线得到垂线段o1b,并且线段ob与线段o1b在推进剂液面成像上的投影均为线段o’b’;
[0032]
s43、根据成像规律得到:
[0033][0034]
s44、由于
△
oo1a和
△
oo2b为全等三角形,o2ob=h
△
h,代入步骤s43中,得到推进剂液面高度h为:
[0035][0036]
本发明的方法如下:
[0037]
步骤1:在圆柱形储箱顶部安装1台相机,并使相机视轴与储箱轴线重合,对推进剂液面进行成像;
[0038]
步骤2:在推进剂液面成像中,o’点为储箱轴线在像平面上的投影点,选择两个夹角为π的半径o’a’和o’b’,其长度分别为r1’
和r2’
。
[0039]
步骤3:根据成像规律,像平面上的半径o’a’和o’b’为推进剂液面上的半径oa和ob的成像,其中o点为储箱轴线与液面的交点。分别经过a点和b点做储箱轴线的垂线段ao1和bo2,由于点o1和o2在储箱轴线上,因此点o1、o2和o在像平面上的成像点均为o’点。进一步,线段oa与线段o1a在像平面上的投影均为线段o’a’;线段ob与线段o2b在像平面上的投影均为线段o’b’。
[0040]
步骤4:根据线段o1a的成像规律可得:
[0041][0042]
根据线段o2b的成像规律可得:
[0043][0044]
其中,点ob为储箱轴线与储箱底部的交点,f为相机镜头焦距。
[0045]
步骤5:在
△
oo1a和
△
oo2b中,∠aoo1=∠boo2,∠ao1o=∠bo2o=π/2,ao1=bo2=r,r为储箱横截面半径,可知
△
oo1a和
△
oo2b为全等三角形,进一步有oo1=oo2=
△
h,o1ob=h
‑△
h,o2ob=h
△
h,其中h=obo为待测的液位高度,代入步骤4的两个公式可得:
[0046][0047][0048]
步骤6:根据步骤5的两个公式可得液位高度h:
[0049][0050]
本发明具有以下优点:
[0051]
(1)本发明提出的基于双半径解算的光学测量方法不受储箱液面倾斜的影响,更加适用于真实的火箭飞行工况,可显著提高液位测量精度,有利于进一步优化火箭运载能力,提高火箭总体性能,并且该方法简便可行易于实现。
[0052]
(2)本方法不含有角度参数θ,且两个半径r1′
和r2′
可以任意选择,只需两半径夹角保持为π,方法简单易行。
附图说明
[0053]
图1为一种基于双半径解算的火箭推进剂液位光学测量方法光学测量的基本测量原理;
[0054]
图2为一种基于双半径解算的火箭推进剂液位光学测量方法流程图;
[0055]
图3为一种基于双半径解算的火箭推进剂液位光学测量方法光学测量的双半径测量原理;
[0056]
图4为一种基于双半径解算的火箭推进剂液位光学测量方法的推进器液面成像示意图;
[0057]
图5为一种基于双半径解算的火箭推进剂液位光学测量方法的单半径法解算误差。
具体实施方式
[0058]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0059]
实施例1
[0060]
如图2-4所示,一种基于双半径解算的火箭推进剂液位光学测量方法,包括如下步骤:
[0061]
s1、组装相机:将相机安装在储箱顶部,使相机的视轴与储箱轴线重合,储箱为圆柱形;
[0062]
s2、成像:相机对火箭推进剂液面进行拍摄,得到推进剂液面成像;
[0063]
s3、单一半径解算:在推进剂液面成像中选取半径o’a’,其中,o’点为储箱轴线在推进剂液面成像平面上的投影点,o’a’长度为r1’
,根据成像规律得到推进剂液面高度h为:
[0064][0065]
其中,h为相机距离储箱底部的安装高度,f为相机镜头焦距,r为储箱横截面半径,a’在推进剂液面上对应点为a点,推进剂液面与储箱轴线的交点为o点,a点在储箱轴线上的垂线交点为o1且o1点位于o点下方,
△
h为oo1的长度;
[0066]
s31、在推进剂液面成像中选取半径o’a’,根据成像规律得到o’a’在推进剂液面上的半径oa;
[0067]
s32、从a点做与储箱轴线的垂线,得到垂线段o1a,并且线段oa与线段o1a在推进剂液面成像上的投影均为线段o’a’;
[0068]
s33、根据成像规律得到:
[0069][0070]
其中,ob为储箱轴线与储箱的底部的交点;
[0071]
s34、将o1ob=h
‑△
h代入步骤s33中,得到推进剂液面高度h为:
[0072][0073]
s4、双半径解算:火箭运行时,
△
h不为零,为了将
△
h消除,在推进剂液面成像中选取与半径o’a’夹角为π的半径o’b’,o’b’长度为r2’
,根据成像规律得到推进剂液面高度h为:
[0074][0075]
其中,b’在推进剂液面上对应点为b点,推进剂液面与储箱轴线的交点为o点,b点在储箱轴线上的垂线交点为o2且o2点位于o点上方,oo2的长度同样为
△
h;
[0076]
s5、获得液面高度h:将步骤s3与步骤s4的公式相加,消除
△
h,得到推进剂液面高度h为:
[0077][0078]
并计算得到推进剂液面高度h;
[0079]
s41、在推进剂液面成像中选取与半径o’a’夹角为π的半径o’b’,根据成像规律得到o’b’在推进剂液面上的半径ob;
[0080]
s42、从a点做与储箱轴线的垂线得到垂线段o1b,并且线段ob与线段o1b在推进剂液面成像上的投影均为线段o’b’;
[0081]
s43、根据成像规律得到:
[0082][0083]
s44、由于
△
oo1a和
△
oo2b为全等三角形,o2ob=h
△
h,代入步骤s43中,得到推进剂液面高度h为:
[0084][0085]
设定储箱直径d=5m,储箱高度h=10m,液位高度h=7m,相机安装于储箱顶部,镜头焦距f=25mm。
[0086]
令液面倾斜角度分别为α=15
°
、α=30
°
和α=45
°
,根据液面成像计算出参数θ在0
°
~360
°
范围内取值时对应的液面成像半径r
′
,将半径r
′
代入单半径解算方程,计算出液位
高度h1,进一步得到单半径解算误差δh1=h
1-h,参见附图5。
[0087]
令液面倾斜角度α=30
°
,根据液面成像计算得到θ1和θ2=θ1 π对应的两个夹角为π的半径r1′
和r2′
,将r1′
和r2′
代入步骤s5,计算出液位高度h2,进一步得到双半径解算误差δh2=h
2-h,参见下表。
[0088][0089]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。