1.本发明的主题是一种用于机动车辆刮水器系统的电马达,优选为无刷电马达。
背景技术:
2.已知的是,这种电马达主要具有转子和定子。通常,定子包括用于电磁地激励转子的多个线圈,而转子包括多极磁体。电马达被配置成使得当线圈被供给电流时,产生磁场,导致多极磁体旋转,这旋转驱动轴。驱动轴承载有一个环形螺杆,该环形螺杆与固定到输出轴的齿轮啮合。
3.由于电马达被引入到电动车辆的刮水器系统中,电马达需要尽可能地紧凑和轻便。
技术实现要素:
4.本公开寻求改善这种情况。
5.为此,提出了一种无刷电马达,特别是用于机动车辆的刮水器装置的无刷电马达,其包括第一部分,称为电气部分,具有定子和转子,定子包括多个电磁激励线圈,转子被安装成使得驱动轴围绕旋转轴线旋转,电马达还包括第二部分,称为电子部分,具有输出轴和减速齿轮机构,减速齿轮机构包括驱动轴的环形螺杆和齿轮,该齿轮被设计成与环形部分啮合并且使输出轴旋转,电马达包括至少一个用于引导驱动轴的旋转的滚动轴承,以及用于测量转子位置的多极磁体,滚动轴承设置在驱动轴上、用于测量转子位置的所述磁体与环形螺杆之间,使得所述电气部分具有用于测量转子位置的磁体。
6.因此,借助于用于测量转子位置的磁体的位置,马达被划分作为一部分的电气部分和作为另一部分的电子部分,这简化了组装并确保了驱动轴的更好的弯曲强度。
7.根据另一方面,马达包括电路板,该电路板设置有被称为主要部分的第一部分和被称为横向部分的第二部分,该第二部分从主要部分朝向电气部分突出,横向部分承载着被配置为与多极磁体协作的磁传感器。
8.根据另一方面,横向部分邻近多极磁体设置。
9.根据另一方面,马达包括被称为中间部件的部件,该部件具有被配置为围绕驱动轴安装的环形体,并且包括连接器。
10.根据另一方面,连接器被配置为传输去往定子的电力信号,并传输与转子位置相关的信号。
11.根据另一方面,马达包括辅助电路板,其旨在确定转子的位置。
12.根据另一方面,辅助电路板以平行或垂直于所述主要部分的取向设置。
13.根据另一方面,电路板邻近多极磁体设置,并且设置有被配置为与多极磁体协作的磁传感器。
14.根据另一方面,辅助电路板至少由中间部件的环形件和/或连接器支撑。
15.还提出了一种用于机动车辆的刮水器系统,其包括如上所述的电马达。
附图说明
16.通过阅读下面的详细描述并研究附图,进一步的特征、细节和优点将变得显而易见,在附图中:
17.图1示出了根据本发明第一实施例的电马达的透视图;
18.图2示出了图1中马达的仰视图,未示出覆盖件;
19.图3示出了没有外壳的情况下的图1中马达的透视侧视图;
20.图4示出了根据本发明第二实施例的电马达的透视图;
21.图5示出了没有外壳的情况下的图4中马达的透视侧视图;
22.图6示出了没有外壳的情况下的图4中马达的另一透视侧视图;
23.图7示出了图4中电马达的中间部件的透视图;和
24.图8示出了图4中电马达的外壳部分的透视图。
具体实施方式
25.附图和下面的描述大部分包含特定特征的元素。因此,它们不仅用于更好地理解本公开,还在适当的情况下有助于其限定。
26.本发明的主题是一种用于机动车辆刮水器系统的无刷电马达,优选为无刷dc电马达,在附图中用1标记。
27.现在将参照图1至图4中的第一实施例描述本发明。
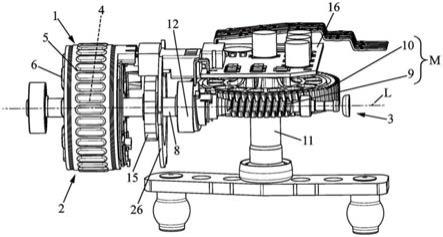
28.如图所示,马达1包括电气部分(electric part)2和电子部分(electronic part)3。
29.电气部分2具有转子4和定子5。定子5包括多个线圈6,用于电磁地激励转子4。转子4包括多极磁体,该多极磁体被安装成围绕标记为l的旋转轴线旋转。
30.电马达1被构造成使得转子4在定子5内转动,从而旋转被称为驱动轴8的轴8,轴8被固定到转子4。驱动轴8沿着旋转轴线l延伸。
31.电子部分3包括驱动轴8的环形螺杆9以及齿轮10,齿轮10安装成使得被环形螺杆9啮合。电子部件3还包括设计成由齿轮10旋转的输出轴11。
32.因此,螺纹部分9和齿轮10形成减速齿轮机构m,输出轴11的转速低于驱动轴8的转速。
33.有利地,输出轴11基本上垂直于驱动轴8。
34.从图3中可以看出,滚动轴承12引导驱动轴8。如本领域技术人员所知,滚动轴承包括由设置有滚动元件的保持架(cage)分开的内环和外环,内环和外环彼此分离。
35.从图3中还可以看出,电马达1包括设置在电气部分2中的多极磁体15,滚动轴承12安装在多极磁体15与环形螺杆9之间。
36.因此,因为磁体15是电气部分2的组成部分,所以电马达1被划分为作为一部分的电气部分2与作为另一部分的电子部分3。由于电气部分2和电子部分3之间的这种完全的功能分离,电马达1变得更加可靠且更加紧凑。滚动轴承12尽可能靠近齿轮10的位置允许更好的弯曲强度,这意味着驱动轴8在更高的弯曲载荷下变形或断裂。
37.从图3中可以看出,多极磁体15是安装在驱动轴8上的平的圆柱体。
38.电马达1还包括电路板16,如图2和图3所示,电路板16包括被称为主要部分的第一
部分17和被称为横向部分的第二部分18,第二部分18从主要部分17朝向电气部分2突出。电路板16包括了向定子供电和切换定子以及控制马达所需的电路和电子元件。
39.主要部分设置为面向驱动轴8的环形螺杆9。
40.横向部分18设置为面向多极磁体15,并且承载磁传感器19,例如霍尔效应传感器,用于检测多极磁体15的磁极变化,使得由多极磁体15和磁传感器19形成的组件构成用于测量转子4的位置的传感器。
41.从图2中可以更具体地看出,主要部分17和横向部分18中的每一个都具有平行六面体的整体形状,横向部分18的宽度小于主要部分17的长度。因此,横向部分18是狭窄的突起部,使得可以将马达1的其他元件安装在主要部分17与横向部分18之间的空间中,并因此增加电马达1的紧凑性。
42.电路板16还包括用于向线圈6供电的引脚20。
43.从图1中可以看出,电马达1包括外壳21,外壳21具有固定在一起的帽22和覆盖件23,从而形成用于机构m和电路板16的壳体。外壳21还包括用于转子4和定子5组件的壳体24。
44.覆盖件23被设计成特别地覆盖齿轮10和电路板16,并且包括由横向部分18相对于部分17形成的薄凸出部所允许的变窄部25,从而如已经指出的那样确保马达1的更好的紧凑性。
45.现在将参照图4至图7中的第二实施例描述本发明。已经结合第一实施例描述的元件具有相同的附图标记。
46.从图4至图7中可以看出,马达1包括电气部分2和电子部分3。
47.电气部分2具有转子4和定子5。定子5包括多个电磁激励线圈6。转子4包括多极磁体,该多极磁体被安装成围绕标记为l的旋转轴线旋转。
48.电马达1被构造成使得转子4在定子5内转动,从而旋转被称为驱动轴8的轴8,轴8被固定到转子4。驱动轴8沿着旋转轴线l延伸。
49.电子部分3包括驱动轴8的环形螺杆9以及齿轮10,齿轮10安装成使得被环形螺杆9啮合。电子部件3还包括设计成由齿轮10旋转的输出轴11。
50.因此,螺纹部分9和齿轮10形成减速齿轮机构m,输出轴11的转速低于驱动轴8的转速。
51.有利地,输出轴11基本上垂直于驱动轴8。
52.从图5中可以看出,滚动轴承12引导驱动轴8。如本领域技术人员所知,滚动轴承包括由设置有滚动元件的保持架分开的内环和外环,内环和外环彼此分离。
53.从图5中还可以看出,电马达1包括设置在电气部分2中的多极磁体15,滚动轴承12安装在多极磁体15与环形螺杆9之间。
54.因此,因为磁体15是电气部分2的组成部分,所以电马达2被划分为作为一部分的电气部分2与作为另一部分的电子部分3。由于电气部分2和电子部分3之间的这种完全的功能分离,电马达1变得更加可靠且更加紧凑。滚动轴承12尽可能靠近齿轮10的位置允许更好的弯曲强度,这意味着驱动轴8在更高的弯曲载荷下变形或断裂。
55.从图5中可以看出,多极磁体15是安装在驱动轴8上的环形体。
56.电马达1还包括电路板16,电路板16承载用于向线圈6供电的引脚20。电路板16具
有平行六面体的整体形状。
57.电马达1还包括设置在多极磁体15与引导滚动轴承12之间的中间部件26。
58.从图7中可以更具体地看出,中间部件26包括环形体27,该环形体27被设计成围绕驱动轴8安装,并且,固定到环形体27的电连接器28设置在环形体27上方。
59.环形体27确保了布置的机械对准。电连接器28确保电力信号(也就是说,用于向线圈供应电力的电流)的传输以及与转子位置相关的信号的传输,如现在将要解释的。
60.因此,中间部件26允许三种功能的组合,即机械对准、电力传输(定子的线圈的电力供应)和命令传输(转子的位置)。
61.连接器28包括从环形体27朝向磁体15延伸的壳体部分29和从环形体27朝向电路板16延伸的壳体部分30,用于线圈的供电的槽20穿过壳体29和30。
62.从图6中可以看出,连接器28还包括面向多极磁体15设置的辅助电路板31。电路板31承载磁传感器19,例如霍尔效应传感器,用于检测多极磁体15的磁极的变化,使得由多极磁体15和磁传感器19形成的组件构成转子4的角位置的传感器。因此,由传感器19输出的信号可以由连接器28传输。辅助电路板31有利地仅用于传感器19,由此确保其占用很少的空间。
63.在该实施例中,辅助电路板设置在平行于电路板16的取向上。然而,在其他配置中,其他取向也是可能的:例如,辅助电路板31可以设置在垂直于电路板16的取向上。辅助电路板31优选地由环形件27或连接器28承载,但是也可以以另一取向自由地安装在外壳中,并且通过例如柔性导体电连接到电路板。
64.从图4中可看出,电马达1包括外壳21,外壳21具有固定在一起的帽22和覆盖件23,从而形成用于机构m和电路板16的壳体。外壳21还包括用于转子4和定子5组件的壳体24。
65.从图8中可以看出,帽22包括用于接收环形体27的壳体32和用于容纳连接器28的孔33。
66.应当注意,中间部件26使得可以保持外壳相对于现有技术不被改变,从而避免了对已知电马达生产线进行修改的需要。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。