1.本发明涉及机器人康复装置的技术领域。特别是,本发明涉及一种具有柔性骨盆附接件的、在跑步带上的机器人康复红外线装置。
2.本发明的目的在于开发一种机器人自动化系统,该机器人自动化系统使得用户能够执行与物理和本体感觉刺激相结合的机器人康复,以便使康复过程加速和最大化。
3.即使在遭受创伤和无效病理之后,机器人康复也能够恢复至几乎正常的生活。机器人理治师的使用为永久性和暂时性残疾的治疗开辟了一条新途径。它们实际上是用于肢体康复的外骨骼和其它机器人系统:可穿戴机器人能够为不能使用腿和手的人提供了至少部分活动能力。
背景技术:
4.在本领域中,现今可用的康复系统通过强迫用户执行只与纯视觉刺激相结合的强制运动来提供机械刺激,这很容易提供本体感觉刺激,以便在运动过程中加速康复恢复过程。
5.无论如何,存在基于使用红外线辐射的康复技术。
6.红外线的波长在7600到150000埃之间,但是在临床实践中通常使用大约40000埃的辐射。英国天文学家在1800年发现,肉眼看不到红外线。在光谱内,红外线辐射范围紧邻可见光的红色范围。因此,它们是低频射线,并能够发射热量。该特征恰好有利于它在医疗和美容领域中的应用。
7.红外线辐射的主要效果是热作用,因此,这种治疗形式用于让病人准备做按摩或运动治疗。实际上,温和的热量有镇静和放松的效果。局部应用将在灯位于离要治疗的区域50-60cm的情况下进行20-30分钟,该治疗区域被认为并不急迫。
8.要治疗的区域必须是裸露的,辐射穿透至皮肤下面达到0.5-10mm。
9.红外线将由皮肤表层迅速吸收,因此它们的穿透能力有限。穿透程度与波长成反比。
10.这恰恰是治疗的极限:穿透能力。红外线辐射的主要生物效果是热效果。红外线在由周围组织吸收时产生热量。
11.产生的热量将部分分散至环境中,部分通过传导和通过循环液体而传递至深层组织。
12.作为次要效果,温度升高导致组织代谢增加、毛细血管和小动脉的血管舒张以及肌肉放松。
13.主要是表面组织受到这些效果的影响。
14.红外线的治疗效果主要是由于照射组织的温度升高,且表现为肌肉放松、镇痛、营养效果。
15.红外线辐射的镇痛效果归因于病理组织中致痛物质的消除以及收缩肌肉的放松。
16.在血管扩张后的血流量增加使得组织获得更多的营养物质、氧气、白细胞和抗体,并简化了代谢产物从组织中的消除。
17.这些生物变化提高了组织的营养性,促进了组织损伤的修复,并加速了慢性炎症渗透的解决。
18.这些射线传递的热量很容易由身体吸收,因为它只穿透皮肤和组织的表面,且除了刺激神经和肌肉电平外还引起有益的血管舒张。利用红外线辐射的治疗特别表示了治疗与循环系统和骨骼系统以及肌肉相关的特殊疾病。
19.红外线在康复中用于对比收缩和肌肉疼痛,并使得肌肉准备按摩和理疗治疗。
20.这是因为当它们被引导至要治疗的区域时,它们将深入加热,从而确定在治疗区域中存在的血管扩张,且增加局部血液循环,因此组织更多地氧合、再生。
21.而且,它还增加了对神经末梢的刺激效果,这减轻疼痛和放松肌肉。
22.因此,它们表示为用于治疗颈痛、颈椎和腰椎关节病、肌肉收缩和褥疮。
23.今天,在现有技术中,很多装置能够执行机器人康复和使用跑步带来行走,同时用户由重量卸荷系统支承,和/或在跑步带上行走时也由腿部矫形装置或支架来支承,这些装置的重量能够通过其它重量减轻元件(作为平行四边形支承框架)来减轻。
24.ep1137378介绍了一种自动机器,它用于跑步带治疗(步行治疗),该跑步带治疗可用于下身轻瘫和轻偏瘫的病人,它自动地在跑步带上引导腿部。该机器由引导和控制的矫形装置、跑步带和卸荷机构组成,该矫形装置在生理运动模型中引导腿部。矫形装置膝关节和髋关节各自提供有圆盘。
25.这种矫形装置通过稳定装置而稳定在跑步带上,这样,病人不必保持他的平衡。矫形装置能够调节高度,并能够很容易地适用于不同病人。
26.该机构的进一步发展涉及一种用于调节高度和作用在重物上的卸荷力的装置,如在ep1586291中所述,它表示了两个不同的索缆长度调节装置。一个索缆长度调节装置提供为用于调节索缆长度,以便限定所悬挂的重物的高度。另一个索缆长度调节装置用于调节索缆长度,以便限定作用在所悬挂的重物上的卸荷力。在ep1908442中能够看到用于调节卸荷力的另一机械方案。wo2010/105773、kr20130038448、wo2012/178171、us2007/270723和us2007/004567介绍了一种步行训练设备。
27.另一实例在专利申请pct/ep2014/063053中介绍,其中介绍了一种用于在跑步带上自动训练用户的装置,该装置包括:框架,该框架设置成使得用户能够行走;骨盆附接件,用于支承用户的重量或位置,并有设置成与用户连接的附接元件,其中,骨盆附接件包括位移单元,以便允许和支承由横向固定元件来保持的用户骨盆的运动,通过绕垂直于走动方向的轴线或横向于所述轴线而旋转。
28.在该专利pct/ep2014/063053中,增加了骨盆位移单元,该骨盆位移单元在走动过程中使得用户骨盆运动。
29.但是该方案没有考虑到由外骨骼系统引起的下肢运动是以强制方式强加于用户。增加位移单元(该位移单元也强迫骨盆运动)使得骨盆肌肉和臀肌并不进行任何自由运动,这会使得骨盆肌肉和臀肌在强制运动过程中脱离。实际上,不需要引起骨盆运动,但优选是当腿部在跑步带上强制运动时自由地进行骨盆运动。实际上,这样将使得肌肉并不脱离骨,相反,这能够导致它们自然压缩在骨上,从而使运动更加自然。
30.不利的是,现有技术中已知的系统没有在运动过程中以组合方式作用于肌肉上的物理系统。
31.优选是,由本发明提出的、用于在跑步带上进行机器人康复的装置基于红外线系统,该红外线系统与引起的用户运动相结合。
32.而且,用户的骨盆通过柔性骨盆附接件来固定,该柔性骨盆附接件不允许肌肉与骨骼脱离,但它在腿部强制运动时自由地陪伴骨。
技术实现要素:
33.本发明的目的是通过使用红外线辐射来方便机器人康复。
34.本发明的另一目的是将红外线辐射发射与引起用户运动相结合。
35.本发明的另一目的是在由机器人康复引起运动的过程中提供物理刺激。
36.本发明的另一目的是通过以不同方式加热各种肌肉来提供同时的物理刺激。
37.本发明的另一目的是在不同光源打开时在不同肌肉带上提供用户可见的同时本体感觉刺激。
38.在另一方面,本发明的目的是提供一种装置,该装置通过电刺激结合诱导运动而在机器人康复过程中刺激肌肉。
39.该问题通过根据权利要求1的具有柔性骨盆附接件的、用于在跑步带上机器人康复的红外线装置来解决。
40.本发明的优选特征在从属权利要求中确定。
41.本发明实现了上述目的,因为它是一种具有柔性骨盆附接件的、用于机器人康复的红外线装置,包括:
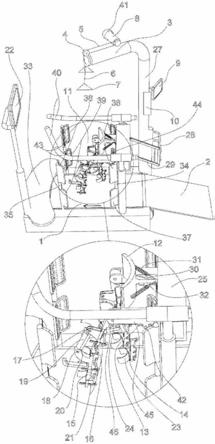
[0042]-跑步带(1),该跑步带(1)在它的后部部分中设有处于跑步带高度处的进入脚踏板(2),并在前部部分中设有布置于跑步带高度处的香蕉形枕状件(33),在跑步带(1)的侧部有成一体的立柱(27),该立柱(27)在它的上端有旗形臂(3),该旗形臂(3)在高于人的高度处延伸至所述跑步带的中心(1);
[0043]-返回带轮(4),该返回带轮(4)铰接在所述旗形臂(3)的端部处,索缆(5)在该返回带轮(4)上滑动,该索缆(5)再与机动绞盘(8)连接,该机动绞盘(8)的位置由编码器(41)确定,该编码器(41)安装在所述机动绞盘(8)的旋转轴线上;
[0044]-均衡器(6),该均衡器(6)在中心与索缆(5)的另一端连接,线束(47)连接在该均衡器(6)的端部(7)上;
[0045]-一对后部竖直伸缩支承件(34),下端成一体地固定在跑步带(1)的各侧;
[0046]-第一对后部上部面板(36),该第一对后部上部面板(36)在顶部固定在所述一对后部竖直伸缩支承件(34)上,设有红外线光源(43),该红外线光源(43)定向成在后部入射在股骨区域的腿部肌肉上;
[0047]-第二对后部下部面板(37),该第二对后部下部面板(37)在底部固定在该对后部竖直伸缩支承件(34)上,设有红外线光源(43),该红外线光源(43)定向成在后部入射在脚踝区域的腿部肌肉上;
[0048]-一对前部竖直伸缩支承件(35),下端成一体地固定在跑步带(1)的各侧;
[0049]-第三对前部上部面板(38),该第三对前部上部面板(38)在顶部固定在该对前部
竖直伸缩支承件(35)上,设有红外线光源(43),该红外线光源(43)定向成在前部入射在股骨区域的腿部肌肉上;
[0050]-第四对前部下部面板(39),其在底部固定在该对前部竖直伸缩支承件(35)上,设有红外线光源(43),该红外线光源(43)定向成在前部入射在脚踝区域的腿部肌肉上;
[0051]-一对用于臂的支承件(40),该支承件(40)能够调节高度,并能够相互拉近,固定在跑步带(1)的各侧;
[0052]-臂(28),该臂(28)在中间高度处铰接在立柱(27)上,平行四边形运动结构(29)固定在该臂(28)的端部上,该运动结构(29)能够在设置于该运动结构中的气体弹簧的支承下提升,横向水平臂(25)固定在该臂(28)的、与固定侧相对的竖直侧上,小臂(32)从该横向水平臂(25)上开始;
[0053]-水平骨盆支承件(12),该水平骨盆支承件(12)在中心处铰接在小臂(32)的端部上,并通过可变刚性弹簧(31)而在横过跑步带(1)的位置处保持在它的操作构型,该可变刚性弹簧(31)在一端处与水平骨盆支承件(12)的各侧铰接,在另一端与小臂(32)的点铰接;
[0054]-可调节阻尼液压阻尼器(30),该液压阻尼器(30)在一端处与水平骨盆支承件(12)的一侧铰接,在另一端处与小臂(2)的点铰接;
[0055]-第五对上部中心面板(44),该第五对上部中心面板(44)通过连接连杆而固定在横向水平臂(25)上,设有红外线光源(43),该红外线光源(43)定向成在后部入射在臀肌区域上;
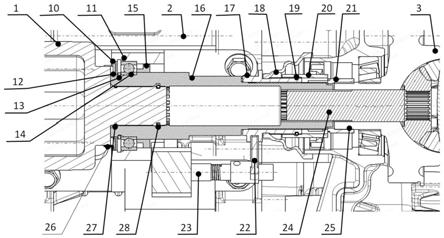
[0056]-用于下肢的机动外骨骼(11),该机动外骨骼(11)在各侧由固定在横向水平臂(25)上的水平上部连杆(45)构成,上部矫形装置连接连杆(16)铰接在所述水平上部连杆(45)上,该上部矫形装置连接连杆(16)由上部线性促动器(13)来驱动,该上部线性促动器(13)设有位置和力读取器(24),所述上部线性促动器(13)在一端通过与小臂成一体的第一上部铰链(42)而固定在水平上部连杆(45)上,在相对端通过与小臂成一体的第一下部铰链(46)而固定在上部矫形装置连接连杆(16)上,而且,上部矫形装置连接连杆(16)在相对端铰接在下部矫形装置连接连杆(15)上,该下部矫形装置连接连杆(15)由下部线性促动器(19)来驱动,该下部线性促动器(19)设有位置和力读取器(20),所述下部线性促动器(19)在一端通过与小臂成一体的第二上部铰链(17)而固定在上部矫形装置连接连杆(16)上,在相对端通过与小臂成一体的第二下部铰链(18)而固定在下部矫形装置连接连杆(15),而且,所述水平上部连杆(45)通过蜗杆和驱动手轮(26)而在两个腿部矫形装置之间提供拉紧运动;
[0057]-连接小臂(21),该连接小臂(21)通过引导件而滑动,该引导件能够卡在上部矫形装置连接连杆(16)和下部矫形装置连接连杆(15)上,在各连接小臂(21)的端部处通过铰链装置(14)而与用于腿部的带附接件(23)铰接;
[0058]-用户界面监视器(22),该用户界面监视器(22)位于跑步带(1)的前面,在使用所述跑步带(1)的用户可见的位置;
[0059]-触摸屏编程单元(9),该触摸屏编程单元(9)布置在跑步带(1)侧部,从所述触摸屏编程单元(9)对跑步带(1)的运动、红外线光源(43)的强度以及用于下肢的机动外骨骼(11)的自动运动进行编程;
[0060]-数据处理和控制单元(10),该数据处理和控制单元(10)以不同的方式在后部上
部面板(36)、后部下部面板(37)、前部上部面板(38)、前部下部面板(39)和中心上部面板(44)之间管理红外线光源(43)的打开频率和强度,从而与用于下肢(11)的机动外骨骼的自动运动以及跑步带(1)的运动相结合。
[0061]
这样,红外线辐射的作用与外骨骼的运动相结合提供了一种物理作用,因为它加热了由于运动而兴奋的肌肉,同时该作用也成为用户的本体感觉刺激,因为打开操作与用户可见的单个运动结果相结合,该用户在感知它后将在感官上与该运动相结合。
[0062]
而且,在立柱(27)上还能够与由数据处理和控制单元(10)控制的上肢外骨骼连接,该数据处理和控制单元(10)设有红外线光源面板,该红外线光源面板以不同方式照射臂,从而以不同方式使得照射与所述上肢外骨骼的运动相结合。香蕉形枕状件(33)使得治疗师能够帮助用户将下肢矫形装置钩在腿部上,同时能够在跑步带的高度处坐在跑步带(1)的右侧、左侧和中间。光源还能够有与红外线不同的波长。
[0063]
电极可以布置在下肢和可能的上肢矫形装置上,与腿部和臂的肌肉接触,由数据处理和控制单元(10)来控制的这些电极通过发送的脉冲与由下肢和上肢矫形装置引起的运动相结合而刺激肌肉。
[0064]
而且,为了不使皮肤过热和使得照射最大化,光源可以发射呈脉冲形式的光。
[0065]
下面将详细介绍红外线光源的刺激与机动外骨骼的作用相结合的
优选实施例
[0066]
如前所述,该装置包括:
[0067]-跑步带(1),
[0068]-机动绞盘(8),用于支承带束(47),该带束(47)用于支承病人的重量;
[0069]-红外线光源(43),该红外线光源(43)定向成在后部入射在后部股骨区域、后部踝区域的腿部肌肉上;入射在前部股骨区域;前部踝区域;臀肌区域;
[0070]-水平骨盆支承件(12),该水平骨盆支承件(12)铰接在竖直轴线上,并设有可调节的刚性弹簧(31)和可调节的阻尼液压阻尼器(30);
[0071]-用于下肢的机动外骨骼(11),该机动外骨骼(11)设置成固定在病人的股骨、胫骨和脚部上,且它在用户以与跑步带(1)的运动相结合的方式行走时引导他的运动;
[0072]-用户界面(22),该用户界面(22)在用户可见的位置;
[0073]-数据处理和控制单元(10),该数据处理和控制单元(10)对于提供的各光源以不同方式管理红外线光源(43)的打开频率和强度,并使它与用于下肢(11)的机动外骨骼的自动运动相结合。
[0074]
还有,红外线辐射的作用与外骨骼的运动相结合,既加热由光源照射的肌肉,还为用户提供本体感觉刺激,因为光源打开与单个运动相结合能够由用户感知,该用户再在感觉上使它与该运动相结合。
[0075]
而且,多个电极能够布置成与腿部和/或臂的肌肉接触,这些电极由数据处理和控制单元(10)来控制,并设置成以与下肢和上肢矫形装置引起的运动组合的方式来刺激肌肉。
[0076]
在优选实施例中,计算机程序储存在所述处理和控制单元(10)上,该计算机程序设置成实施以下方法:
[0077]
(1)将下肢细分为多个区域,各区域与由设置于装置中的一个红外线光源的刺激相关联。
[0078]
优选是,对于病人的各侧(右/左),一个区域与臀肌相关联,一个区域与前部股骨部分相关联,一个区域与后部股骨部分相关联,一个区域与前部胫骨部分相关联,一个区域与后部胫骨部分相关联。
[0079]
(2)对于在点1中限定的各所述区域,将由所述机动外骨骼施加的动作循环示意表示为在各区域中提供的主肌肉群的多个收缩和放松步骤的序列;
[0080]
(3)对于各光源,根据在点2)中示意表示的、用于与特定光源相关联的区域的收缩和放松循环而确定强度调节循环。
[0081]
强度调节循环优选是设置成使得各光源在相关肌肉群的收缩步骤中打开;在实施例中,各光源能够在收缩步骤之前在限定的时间打开,从而提供能够“通知”用户需要收缩相关肌肉群的刺激。
[0082]
优选是但并不局限于,该方法还包括以下步骤:
[0083]
(4)对于用于刺激在点1)中限定的一个区域中的肌肉群的各电极,根据在点2)中示意表示的收缩和放松循环来确定肌肉刺激循环。
[0084]
刺激循环优选是设置成使得各电极在相关肌肉群的收缩步骤中刺激它安装处的肌肉。
[0085]
在实施例中,各电极能够在收缩步骤之前的限定的时间中驱动,以便提供能够“通知”用户需要收缩相关肌肉群的刺激。
[0086]
在另一实施例中,该装置的特征在于,所述外骨骼设置成测量由与点1中限定的各所述区域相关联的各肌肉群施加的肌肉作用力,且强度调节循环设置成使得各所述光源(43)能够进行调节,以使得它的强度与由照射的肌肉群施加的作用力的强度成比例地变化。
[0087]
热刺激和可能的电刺激以及步行循环之间的这种同步性明显地增强了用户对它的运动的感知,从而加速了康复循环。
[0088]
在另一实施例中,该装置还包括用于上肢的外骨骼,该外骨骼设置成以与所述用于下肢的外骨骼的运动相协调的方式引导用户的臂的运动。协调方式意味着振荡运动施加给通常生理步行的用户的臂。在该实施例中,该装置还包括多个其它光源,这些光源用于照亮病人的上肢区域的各肌肉,且其特征在于,所述处理单元设置成根据由所述外骨骼施加给上肢的运动循环而对于各所述光源以不同的方式管理所述其它光源的强度调节循环。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。