1.本发明涉及水声通信网络领域,主要是一种水声通信体制自适应优选方法。
背景技术:
2.水声通信是目前有效的水下远距离无线通信手段之一,广泛应用与海洋观测、警戒探测、安全防卫等 领域。目前,水声通信常用的调制解调方式主要包括直接序列扩频(dsss)通信、正交频分复用(ofdm) 通信、单载波相干相移键控(psk)通信以及多进制频移键控(mfsk)通信等。这些水声通信体制在通 信能力、可靠性、隐蔽性等方面具有各自优势,互补性强。不同通信体制的优缺点可简要分析如下:
3.(1)直接序列扩频(dsss)通信体制将信息携带在长码序列上,在抗干扰、抗时延多径、抗多普 勒上有性能优势,适用于低信噪比的远距离通信场合,缺点是通信速率低,主要用于远距离的指令传输;
4.(2)正交频分复用(ofdm)通信体制将信息携带在多个并行传输的子载波相位上,通信速率可 以很高,缺点是ofdm对多普勒比较敏感,需要的通信信噪比较高,主要用于收发平台较为稳定且没有多 普勒突变下的高速通信场合;
5.(3)单载波相干(psk)体制将信息携带在载波的相位上,通信速率较高,信号峰平比低,但是 性能受限于水声时变多径信道引起的复杂码间干扰,一般用于信道条件较好,即信噪比较高、多普勒有限、 时延扩展有限的水声通信信道环境;
6.(4)多进制频移键控(mfsk)通信体制将信息携带在多个子载波的频带能量上,传输可靠性介 于扩频和ofdm体制之间,缺点是通信速率较低,适用于信噪比较低、多普勒较大的低速通信场合;
7.由上可见,不同的水声通信调制解调方式具有各自的优缺点。在进行具体选取时,需要综合信道的时 延扩展、多普勒扩展、以及信噪比等进行选取。同时,选取时也需要考虑数据传输的数据率需求以及发送 能耗等因素。
8.在传统的水声通信中,水声通信体制的选取与确定主要来自于对于水声信道的先验知识以及对数据传 输的需求。在确定水声通信体制时,需要事先到通信场合采用发送信道探针信号等的形式,测量实际信道 的时延扩展、多普勒扩展以及信噪比等条件,并根据这些条件人为确定所需采用的通信体制。此外,若a 节点需要与b节点发送数据时,a节点先以双方默认的通信体制发送包含信道探针信号的请求发送信号, b节点接收到请求发送信号后,若自身可以接收数据则向a节点以双方默认的通信体制回复允许发送信号, a节点收到允许发送信号后进行数据信号发送,建立数据传输过程。b节点在回复的允许发送信号中包含 此次水声通信所需采用的通信体制。同时,节点在发送数据过程中可以调节发射功率,已延长节点工作时 间。
9.将复杂的信噪比、时延、多普勒等多维影响因素量化,构造基于信噪比-时延-多普勒的三维信道参数 空间,并在参数空间内建立关于信噪比、时延及多普勒的多参量优化目标函数,寻找在实际水声信道约束 下目标函数的最优解从而确定所需采用的水声通信体
制,是解决水声通信体制优化选取的一种常见思路。 然而,在水声通信体制优化选取的实际工程问题中,难以获得关于信噪比、时延及多普勒多参量优化目标 函数的解析形式。因此,在信噪比-时延-多普勒空间内,通过数值仿真的形式确定每种通信体制符合误码 率需求的信道参数空间,将抽象的多参量目标函数优化问题具象化,并综合考虑通信体制传输速率及发送 能耗,是解决水声通信体制优化选取的有益思路。
10.综上可见,针对水声通信体制的选择,如何在信噪比-时延-多普勒空间内构件不同通信体制的稳定工 作性能空间,并在实际场景下结合信道时延扩展、多普勒扩展、信噪比等信道特性的实时测量,以及通信 体制的通信速率及发送能耗等因素,自适应优化选取水声通信体制,已成为水声通信领域技术人员一个迫 切需要解决的重要问题。
技术实现要素:
11.针对现有水声通信体制自适应选取的问题,本发明提供了一种水声通信体制自适应优选方法,本发明 可实现根据水声通信信道的时延扩展、多普勒扩展、信噪、通信速率以及发送能耗等多种情况,自适应地 优化选取适合的水声通信体制,以达到通信可靠性、数据率、能耗等综合最优的水声通信效果。
12.本发明的目的是通过如下技术方案来完成的。一种水声通信体制自适应优选方法,当水声节点不同通 信体制通信算法固化后,构造信噪比-时延-多普勒空间,利用蒙特卡洛仿真得到给定误码率条件下不同备 选通信体制的信道参数空间(稳定工作性能空间);在实际水声通信时,利用握手交互请求发送信号中的 信道探针信号完成信道测量,获取实时信噪比-时延-多普勒的测量值;通过测量值判断当前信道条件所处 的通信体制的信道参数空间;当有两个及以上通信体制的信道参数空间包含当前通信信道实时信噪比-时延
ꢀ‑
多普勒测量值时,根据通信体制通信速率及发送能耗,共同优化选取当前的水声通信体制。
13.本发明的具体步骤如下:
14.步骤1:获取用户的水声通信数据传输需求:
15.明确水声通信用户的数据传输需求,包括误码率需求ber
thre
以及需发送的数据量q;
16.步骤2:构建水声通信信道信噪比-时延-多普勒的多维参数空间v;
17.[1]设信噪比η的分辨率为δη,并将信噪比的取值范围量化为(η1,η1 δη,...,η1 (n
1-1)δη),共n
η 个信噪比取值;
[0018]
[2]设时延τ的分辨率为δτ,并将时延的取值范围量化为(τ1,τ1 δτ,...,τ1 (n
2-1)δτ),共n
τ
个时 延取值;
[0019]
[3]设多普勒β的分辨率为δβ,并将多普勒的取值范围量化为 (-β1,-β1 δβ,...,-β1 (n
3-2)δβ,β1),共n
β
个多普勒取值;
[0020]
[4]从信噪比-时延-多普勒的三维信道参数空间上分析,一共形成n
η
×nτ
×nβ
组信噪比-时延-多普勒(η
x1
,τ
x2
,β
x3
)的取值;
[0021]
[5]设一共有n种通信体制,即通信体制t1,通信体制t2,通信体制t3,
…
,通信体制tn;当每种通 信体制的算法确定后,在信噪比-时延-多普勒的三维信道参数空间内采用蒙特卡洛仿真的形式,确定 每一种通信体制满足用户误码率需求ber
thre
所对应的信道参数
空间,即v
t1
,v
t2
,v
t3
,...,v
tn
;
[0022]
步骤3:在信噪比-时延-多普勒的信道参数空间下对每一种通信体制开展蒙特卡洛仿真,并记录仿真得到 的误码率:
[0023]
针对每一种通信体制,即通信体制t1,通信体制t2,通信体制t3,
…
,通信体制tn,在步骤2[4] 的每一组信噪比-时延-多普勒(η
x1
,τ
x2
,β
x3
)取值下进行蒙特卡洛仿真,并记录仿真得到的误码率,共得到 n
η
×nτ
×nβ
×
n个误码率值,记为(ber
t1i
,ber
t2i
,ber
t3i
,...,ber
tni
),其中i=1,...,n
η
×nτ
×nβ
;
[0024]
步骤4:获取不同通信体制满足用户信噪比需求ber
thre
的信道参数适配空间v
t1
,v
t2
,v
t3
,...,v
tn
:
[0025]
[1]根据仿真结果,获取t1通信体制的性能空间,取出n1×
n2×
n3组信噪比-时延-多普勒取值下t1通信 体制的误码率结果ber
t1i
,其中i=1,...,n1×
n2×
n3,记录所有ber
t1i
<ber
thre
的信噪比-时延
‑ꢀ
多普勒取值共n
t1
个满足用户误码率需求的信噪比-时延-多普勒信道参数取值,随后, 将这n
t1
个信噪比-时延-多普勒信道参数取值的集合定义为t1通信体制的信道参数空间v
t1
;
[0026]
[2]参照步骤4[1],获取其他通信体制的信道参数空间v
t2
,v
t3
,...,v
tn
;
[0027]
步骤5:发送探针信号,获取信道实时信噪比-时延-多普勒测量值:
[0028]
在实际进行水声通信时,a节点需要与b节点通信时,a节点先以双方默认的通信体制发送包含信道 探针信号的请求发送信号,b节点接收到请求发送信号后,根据本地事先存储的信道探针信号,结合接收 的信道探针信号,得到信道探查结果,即当前信道的信噪比-时延-多普勒测量值
[0029]
步骤6:判断信道实时信噪比-时延-多普勒测量值被包含的通信体制信道参数空间得到备选通信体制:
[0030]
判断当前信道的实时信噪比-时延-多普勒测量值被包含的通信体制信道参数空间的数量;如 果当前的测量值只被包含在某一种通信体制的信道参数空间内,则选取该通信体制进行通信,参 照步骤7[2]确定最小发射功率后,转向步骤8进行后续执行;如果当前的测量值包含在一种以上 的通信体制的信道参数空间内,则转向步骤7进行后续执行;
[0031]
步骤7:依据发射能量最小准则,进一步进行通信体制的选取:
[0032]
[1]记符合步骤6的通信体制为通信体制1,通信体制2,
…
,通信体制m,对应的通信体制信道参数空 间记为v
t1
,...,v
tm
;
[0033]
[2]针对通信体制m,由其信道参数空间v
tm
确定在信道实际测量值下满足误码率小于ber
thre
所 需的最小稳定工作信噪比η
mmin
,由实际信道的传播损失计算得到发送端所需的最低声源级sl
mmin
, 由此得到所需的最小发射功率p
mmin
;随后根据通信体制m的数据率rm以及节点a需要发送的数据量 q,计算得到所需的发送时间最终得到利用通信
体制m完成此次数据发送所需的最小总能 量e
mmin
=p
mmin
×
tm;
[0034]
[3]针对步骤7[1]中的通信体制,得到(e
1min
,...,e
mmin
)并选取所需最小总能量最小的通信体制m,即 以及本次的发射功率p
mmin
,作为本次通信的通信体制以及最小发射功率,随后转入 步骤8继续执行;
[0035]
步骤8:节点b确定此次需采用的水声通信体制,以及此次通信的最小发射功率,向a节点以双方默认的 通信体制回复允许发送信号,并在允许发送信号中告知节点a进行数据传输所采用的通信体制,节点a 和节点b建立通信过程。
[0036]
当各种通信体制算法确定后,本发明根据蒙特卡洛仿真得到各种通信体制满足用户误码率需求的信道 参数空间,依据探针信号测得的实时信道条件,并结合不同通信体制的数据率以及发射功率,自适应优化 选取所需采用的水声通信体制,与现有的人为水声通信体制选取方法相比,本发明具有如下显著的有益效 果:
[0037]
(1)本发明构造的自适应水声通信体制优化选取方法,可以免去通信体制的人为选取,并实现通信 可靠性、数据率、能耗等综合最优的水声通信效果;
[0038]
(2)通过通信体制蒙特卡洛仿真,构建了完备的通信体制信道参数空间,以作为选取的重要依据;
[0039]
(3)当有两个及以上通信体制的信道参数空间包含当前通信信道实时信噪比-时延-多普勒测量值时, 综合考虑备选通信体制的通信速率及发射能耗,进一步优化选取水声通信体制。
附图说明
[0040]
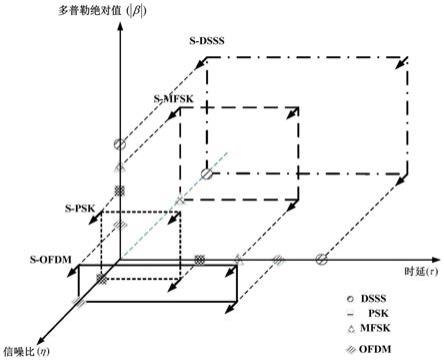
图1:通信体制信噪比-时延-多普勒三维稳定工作性能空间示意图。
[0041]
图2:节点a与节点b握手通信示意图。
具体实施方式
[0042]
下面通过具体步骤与附图对本发明的实施方式进行详细阐述,以使本发明的优点和特征能更易于被技 术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
[0043]
如图1和图2所示,一种水声通信体制自适应优选方法,当水声节点不同通信体制通信算法固化后, 构造信噪比-时延-多普勒空间,利用蒙特卡洛仿真得到给定误码率条件下不同备选通信体制的信道参数(信 噪比-多普勒-时延)空间,即运用蒙特卡洛仿真确定不同通信体制满足用户误码率需求的信道参数空间; 在实际水声通信时,随后基于水声通信利用握手交互请求发送信号中的信道探针信号完成信道测量,获取 实时信噪比-时延-多普勒的测量值(通过收发节点间的握手交互过程,在线测量信道参数);通过测量值 判断当前信道条件所处的通信体制的信道参数空间;当有两个及以上通信体制的信道参数空间包含当前通 信信道实时信噪比-时延-多普勒测量值时,根据通信体制通信速率及发送能耗,共同优化选取当前的水声 通信体制。
[0044]
本实施例通过具体步骤阐述本发明的自适应水声通信体制优化方法的工作模式。在本实施例中,针对 dsss、mfsk、psk、ofdm等四种通信为例,进行自适应水声通信体制优化选取的具体说明。
[0045]
步骤1:获取用户的水声通信数据传输需求:
[0046]
首先,明确水声通信用户的数据传输需求,包括误码率需求ber
thre
以及需发送的数据量q。同时, 在水声通信中,定义dsss、mfsk、psk、ofdm等各种通信体制能够实现可靠水声通信的评判标准是误 码率小于用户的误码率需求ber
thre
。另外,在通信时可以自适应地选取通信体制,并调整发射功率。
[0047]
步骤2:构建水声通信信道信噪比-时延-多普勒等的多维参数空间v;
[0048]
[1]设信噪比η的分辨率为δη,并将信噪比的取值范围量化为(η1,η1 δη,...,η1 (n
1-1)δη),共n1个信噪比取值;
[0049]
[2]设时延τ的分辨率为δτ,并将时延的取值范围量化为(τ1,τ1 δτ,...,τ1 (n
2-1)δτ),共n2个时 延取值;
[0050]
[3]设多普勒β的分辨率为δβ,并将多普勒的取值范围量化为 (-β1,-β1 δβ,...,-β1 (n
3-2)δβ,β1),共n3个多普勒取值;
[0051]
[4]从信噪比-时延-多普勒的三维空间上分析,一共可以形成n1×
n2×
n3组信噪比-时延-多普勒 (η
x1
,τ
x2
,β
x3
)的取值;
[0052]
[5]当每种通信体制的算法确定后,可以在信噪比-时延-多普勒的三维信道参数空间内采用蒙特卡洛仿真 的形式,确定每一种通信体制满足用户误码率需求ber
thre
所对应的信道参数空间,即 v
tdsss
,v
tmfsk
,v
tpsk
,v
tofdm
;
[0053]
步骤3:在信噪比-时延-多普勒的信道参数空间下对每一种通信体制开展蒙特卡洛仿真,并记录仿真得到 的误码率:
[0054]
针对水声通信节点中内化的dsss、mfsk、psk、ofdm的每一种通信体制,在步骤2[4]的每一组 信噪比-时延-多普勒(η
x1
,τ
x2
,β
x3
)取值下进行蒙特卡洛仿真,并记录仿真所取得误码率,共可得到n1×
n2×
n3×
4个误码率值,记为其中i=1,...,n1×
n2×
n3;
[0055]
步骤4:获取dsss、mfsk、psk、ofdm等四种通信体制的信道参数适配空间:
[0056]
[1]根据仿真结果,获取dsss通信体制的性能空间。取出n1×
n2×
n3组信噪比-时延-多普勒取值下 dsss通信体制的误码率结果其中i=1,...,n1×
n2×
n3,记录所有的 信噪比-时延-多普勒取值共n
dsss
个满足用户误码率需求的信噪比-时延-多普勒信道参 数取值。随后,将这n
dsss
个信噪比-时延-多普勒取值的集合定义为dsss通信体制的信道参数空间 v
tdsss
;
[0057]
[2]参照步骤4[1],获取mfsk、psk、ofdm等三种通信体制稳定工作的性能空间v
tmfsk
,v
tpsk
,v
tofdm
; 针对四种通信体制得到的稳定工作性能空间示意图如图1所示,ofdm的性能空间是以面s-ofdm为 底面,向信噪比正方向投影所构成的立体区域,psk的性能空间是以面s-psk为底面,向信噪比正方 向投影所构成的立体区域,mfsk的性能空间是以面s-mfsk为底面,向信噪比正方向投影所构成的 立体区域,dsss的性能空间是以面s-dsss为底面,向信噪比正方向投影所构成的立体区域。图1 仅是性能空间的一种示意,实际的通信体制性能空间可能是不连续的非规则三维曲面。
[0058]
步骤5:发送探针信号,获取信道实时信噪比-时延-多普勒测量值:
[0059]
在实际进行水声通信时,节点a与节点b按照如图2所示的流程进行通信。a节点需
要与b节点通 信时,a节点先以双方默认的通信体制发送包含信道探针信号的请求发送信号,b节点接收到请求发送信 号后,根据本地事先存储的信道探针信号,结合接收的信道探针信号,得到信道探查结果,即当前信道的 信噪比-时延-多普勒测量值
[0060]
步骤6:判断信道实时信噪比-时延-多普勒测量值被包含的通信体制信道参数空间得到备选通信体制:
[0061]
判断当前信道的实时信噪比-时延-多普勒测量值被包含的通信体制信道参数空间的数量;如 果当前的测量值只被包含在某一种通信体制的信道参数空间内,则选取该通信体制进行通信,参 照步骤7[2]确定最小发射功率后,转向步骤8进行后续执行;如果当前的测量值包含在一种以上 的通信体制的信道参数空间内,则转向步骤7进行后续执行;
[0062]
步骤7:依据发射能量最小准则,进一步进行通信体制的选取:
[0063]
[1]记符合步骤6的通信体制为通信体制1,通信体制2,
…
,通信体制m,对应的通信体制信道参数空
[0064]
间记为v
t1
,...,v
tm
;
[0065]
[2]针对通信体制m,由其信道参数空间v
tm
确定在信道实际测量值下满足误码率小于ber
thre
所 需的最小稳定工作信噪比η
mmin
,由实际信道的传播损失等计算得到发送端所需的最低声源级sl
mmin
, 可由此得到所需的最小发射功率p
mmin
;随后根据通信体制m的数据率rm以及节点a需要发送的数据 量q,计算得到所需的发送时间最终得到利用通信体制m完成此次数据发送所需的最小总 能量e
mmin
=p
mmin
×
tm;
[0066]
[3]针对步骤7[1]中的通信体制,得到(e
1min
,...,e
mmin
)并选取所需最小总能量最小的通信体制m,即 以及本次的发射功率p
mmin
,作为本次通信的通信体制以及最小发射功率,随后转入 步骤8继续执行;
[0067]
步骤8:节点b确定此次需采用的水声通信体制,以及此次通信的最小发射功率,向a节点以双方默认的 通信体制回复允许发送信号,并在允许发送信号中告知节点a进行数据传输所采用的通信体制。节点a 和节点b建立通信过程。
[0068]
可以理解的是,对本领域技术人员来说,对本发明的技术方案及发明构思加以等同替换或改变都应属 于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。