技术特征:
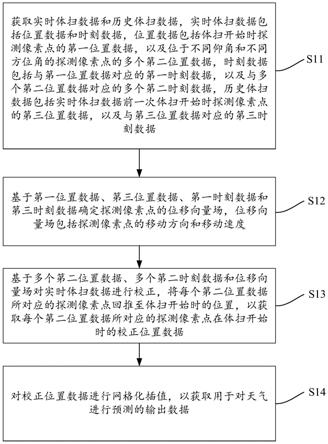
1.一种天气雷达体扫数据校正方法,其特征在于,包括:获取实时体扫数据和历史体扫数据,所述实时体扫数据包括位置数据和时刻数据,所述位置数据包括体扫开始时探测像素点的第一位置数据,以及位于不同仰角和不同方位角的所述探测像素点的多个第二位置数据,所述时刻数据包括与所述第一位置数据对应的第一时刻数据,以及与所述多个第二位置数据对应的多个第二时刻数据,所述历史体扫数据包括所述实时体扫数据前一次体扫开始时所述探测像素点的第三位置数据,以及与所述第三位置数据对应的第三时刻数据;基于所述第一位置数据、所述第三位置数据、所述第一时刻数据和所述第三时刻数据确定所述探测像素点的位移向量场,所述位移向量场包括所述探测像素点的移动方向和移动速度;基于所述多个第二位置数据、所述多个第二时刻数据和所述位移向量场对所述实时体扫数据进行校正,将每个所述第二位置数据所对应的所述探测像素点回推至体扫开始时的位置,以获取每个所述第二位置数据所对应的所述探测像素点在体扫开始时的校正位置数据。2.根据权利要求1所述的天气雷达体扫数据校正方法,其特征在于,所述获取实时体扫数据和历史体扫数据,所述实时体扫数据包括位置数据和时刻数据,所述位置数据包括体扫开始时探测像素点的第一位置数据,以及位于不同仰角和不同方位角的所述探测像素点的多个第二位置数据,所述时刻数据包括与所述第一位置数据对应的第一时刻数据,以及与所述多个第二位置数据对应的多个第二时刻数据,所述历史体扫数据包括所述实时体扫数据前一次体扫开始时所述探测像素点的第三位置数据,以及与所述第三位置数据对应的第三时刻数据,包括:遍历所述天气雷达的雷达体扫基础数据,若所述雷达体扫基础数据中包含与所述第二位置数据对应的所述第二时刻数据,则直接应用;或者,若所述雷达体扫基础数据中不包含与所述第二位置数据对应的所述第二时刻数据,则基于所述第二位置数据中的所述仰角和所述方位角对所述第二时刻数据进行计算。3.根据权利要求2所述的天气雷达体扫数据校正方法,其特征在于,所述若所述雷达体扫基础数据中不包含与所述第二位置数据对应的所述第二时刻数据,则基于所述第二位置数据中的所述仰角和所述方位角对所述第二时刻数据进行计算,包括:若所述雷达体扫基础数据包含所述探测像素点以所述仰角开始扫描的仰角开始时刻数据,但不包含所述探测像素点位于所述方位角的方位角扫描时刻数据,则通过以下公式计算所述方位角扫描时刻数据:其中,t
e,a
为位于仰角为e,方位角为a位置的所述探测像素点的所述方位角扫描时刻数据,a为所述方位角,n为仰角总数,δt为所述第一时刻数据和所述第三时刻数据之差,t
e
为所述仰角扫描开始时刻数据。4.根据权利要求3所述的天气雷达体扫数据校正方法,其特征在于,所述若所述雷达体扫基础数据中不包含与所述第二位置数据对应的所述第二时刻数据,则基于所述第二位置
数据中的所述仰角和所述方位角对所述第二时刻数据进行计算,还包括:若所述雷达体扫基础数据不包含所述探测像素点以所述仰角开始扫描的仰角开始时刻数据,则通过以下公式计算所述仰角开始时刻数据:其中,t
e
为所述仰角扫描开始时刻数据,e为所述仰角,n(e)为e仰角的扫描次序,n为所述仰角总数,δt为所述第一时刻数据和所述第三时刻数据之差,t1为所述第一时刻数据。5.根据权利要求1所述的天气雷达体扫数据校正方法,其特征在于,所述校正方法还包括:对所述校正位置数据进行网格化插值,以获取用于对天气进行预测的输出数据。6.一种校正系统,其特征在于,所述校正系统包括:数据获取模块,用于获取实时体扫数据和历史体扫数据,所述实时体扫数据包括位置数据和时刻数据,所述位置数据包括体扫开始时探测像素点的第一位置数据,以及位于不同仰角和不同方位角的所述探测像素点的多个第二位置数据,所述时刻数据包括与所述第一位置数据对应的第一时刻数据,以及与所述多个第二位置数据对应的多个第二时刻数据,所述历史体扫数据包括所述实时体扫数据前一次体扫开始时所述探测像素点的第三位置数据,以及与所述第三位置数据对应的第三时刻数据;移动向量计算模块,用于基于所述第一位置数据、所述第三位置数据、所述第一时刻数据和所述第三时刻数据确定所述探测像素点的位移向量场,所述位移向量场包括所述探测像素点的移动方向和移动速度;校正模块,用于基于所述多个第二位置数据、所述多个第二时刻数据和所述位移向量场对所述实时体扫数据进行校正,将每个所述第二位置数据所对应的所述探测像素点回推至体扫开始时的位置,以获取每个所述第二位置数据所对应的所述探测像素点在体扫开始时的校正位置数据。7.根据权利要求6所述的校正系统,其特征在于,所述数据获取模块还用于,遍历天气雷达的雷达体扫基础数据,若所述雷达体扫基础数据中包含与所述第二位置数据对应的所述第二时刻数据,则直接应用;或者,若所述雷达体扫基础数据中不包含与所述第二位置数据对应的所述第二时刻数据,则基于所述第二位置数据中的所述仰角和所述方位角对所述第二时刻数据进行计算。8.根据权利要求6所述的校正系统,其特征在于,所述校正系统还包括格式规范模块,所述格式规范模块用于对所述校正位置数据进行网格化插值,以获取用于对天气进行预测的输出数据。9.一种校正系统,其特征在于,所述校正系统包括:处理器;用于存储处理器可执行的指令的存储器;其中,所述处理器被配置为执行权利要求1至5任一项所述的天气雷达体扫数据校正方法。10.一种计算机存储介质,其上存储有计算机指令,其特征在于,所述计算机指令被处理器执行时实现权利要求1至5任一项所述的天气雷达体扫数据校正方法。
技术总结
本发明提供了一种天气雷达体扫数据校正方法、系统和计算机存储介质,属于天气雷达监测技术领域。该校正方法能够基于前一次扫描和本次扫描的提扫基础数据获取探测像素点的运动趋势,并对本次扫描中位于不同仰角和方位角的探测像素点的提扫数据进行回推校正,消除由体扫时间差带来的数据误差,提高天气预警的精确度。该校正系统具有实现上述校正方法的功能。该计算机存储介质上存储有计算机指令,该计算机指令被处理器执行时能够实现上述校正方法。方法。方法。
技术研发人员:张耿斌 张飞 章卓雨 鲍日洋 高淑萍 何正浩
受保护的技术使用者:广东电网有限责任公司广州供电局
技术研发日:2021.11.16
技术公布日:2022/2/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。