1.本发明涉及ct成像技术领域,尤其涉及一种禾本科作物穗部生长发育的无损监测方法。
背景技术:
2.穗部性状是禾谷类作物表型研究的重要部分之一,穗型与作物产量水平和群体结构状况均有着密切的关系,因而穗部性状一直是作物育种及栽培研究的焦点,其主要包括穗的多少、大小、形态等。最早对谷穗产量的相关性状测量方法主要依靠人工,存在费时和误差大等缺点。
3.随着技术的发展,开始有部分基于机器视觉的稻穗谷粒表型性状测量方法,主要包括两类:一类是以高通量数字化考种系统为代表,测量前需要先脱粒,然后获取二维谷粒图像进而提取谷粒性状;另一类方法选取一个稻穗,不需要脱粒,人工将稻穗平铺于扫描仪扫描成像,获取稻穗二维图像,利用图像分析软件对图像进行去背景、识别分割,然后进行性状提取。通过穗部的扫描图像可以获得穗部组成性状包括穗型、穗长、每穗粒数、着粒紧密度、枝梗数目等。其需要人工将稻穗平铺于扫描仪扫描成像,获取稻穗二维图像后再进行识别和提取性状。
4.然而,第一类方法测量前需要先脱粒,然后获取二维谷粒图像进而提取谷粒性状,不能进行原位的测定。第二类方法人工铺平稻穗时需要选择特殊时期,而且此步骤工作量大,另外,因为是平铺的,只能提取谷粒2d性状,无法提取和分析体积、粒厚等谷粒3d性状,也无法活体动态观测稻穗籽粒灌浆等生长发育情况。由此可知,现有技术的方法只能提取谷粒2d性状,无法提取和分析体积、粒厚等谷粒3d性状,也无法活体动态观测稻穗籽粒灌浆等生长发育情况。
技术实现要素:
5.(一)要解决的技术问题
6.鉴于现有技术的上述缺点、不足,本发明提供一种无损监测植物生长发育的方法,其解决了现有技术中无法获取植物3d形状的技术缺陷,实现获取穗部三维构象以提取谷粒性状的目的。
7.(二)技术方案
8.为了达到上述目的,本发明采用的主要技术方案包括:
9.第一方面,本发明实施例提供一种禾本科作物穗部生长发育的无损监测方法,包括:
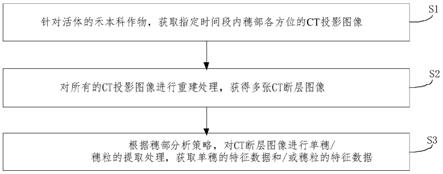
10.s1、针对活体的禾本科作物,获取指定时间段内穗部各方位的ct 投影图像;
11.s2、对所有的ct投影图像进行重建处理,获得多张ct断层图像;
12.s3、根据穗部分析策略,对ct断层图像进行单穗/穗粒的提取处理,获取单穗的特征数据和/或穗粒的特征数据。
13.可选地,指定时间段包括连续n天,且n天中每一天起始时间点和终止时间点均相同。
14.3、根据权利要求2所述的方法,其特征在于,所述方法还包括:
15.s4、根据指定时间段内相同时间点的特征数据进行数据处理,获取用于展示的穗部发育信息/图像信息。
16.可选地,禾本科作物为成熟期的水稻稻穗,单穗的特征数据包括:单穗的稻粒总体积、平均密度、穗长、和/或籽粒总数;
17.穗粒的特征数据包括:穗部总体积、穗部相对平均密度、穗长、单穗籽粒数,和/或籽粒长、宽、高。
18.可选地,所述s1包括:
19.s1-1、将活体水稻放入ct扫描系统的承载台上,且设定ct扫描系统中电压、电流和扫描模式、步进角度;
20.s1-2、ct扫描系统在设定扫描模式下对稻穗部位进行扫描,以设定步进角度对每个方位的穗部样本进行采集,获得每个样本每个方位的p 张投影图像,该每一张投影图像属于稻穗部位的局部图像。
21.可选地,s2包括:
22.通过ct扫描系统中的图像处理设备对每个样本的所有投影图像进行重建,获得每一样本的p张断层图像;
23.或者,
24.通过ct扫描系统中的图像处理设备对每个样本的所有投影图像进行重建,获得每一样本的p张断层图像;以及将每一断层图像以预设命名方式、指定像素、分辨率进行存储。
25.可选地,若获取的是单穗的特征数据,则s3包括:
26.s3-1、根据预设的窗位和窗宽信息,从每一断层图像中提取包括稻穗的roi数据,并将roi数据进行数据格式的映射处理,获取映射处理后的roi;
27.s3-2、根据活体水稻穗部的标识,遍历所有roi,从每一映射处理的roi中分离出带标识的单穗,获取单穗的断层序列;
28.s3-3、将属于一个样本的所有断层序列进行拼接,去除ct设备采集带来的重叠部分,获得拼接后的每个单穗的图像;
29.s3-4、针对拼接后每个单穗的图像,根据体数据连通域的处理方式,识别每一单穗图像中的籽粒,并进行去噪处理,获取含有效籽粒的三维体数据;
30.s3-5、对含有效籽粒的三维体数据进行分析,获得单穗的特征数据。
31.可选地,若获取的是穗粒的特征数据,则s3包括:
32.s3-1a、根据预设的窗位和窗宽信息,从每一断层图像中提取包括稻穗的roi数据,并将roi数据进行数据格式的映射处理,获取映射处理后的roi;
33.s3-2a、根据活体水稻穗部的标识,遍历所有roi,从每一映射处理的roi中分离出带标识的稻穗,获取稻穗的断层序列;
34.s3-3a、将属于一个稻穗的所有断层序列进行拼接,去除ct设备采集带来的重叠部分,获得拼接后的每个稻穗的图像;
35.s3-4a、对拼接后的每个稻穗的图像,采用剪切插件分离单籽粒并分析,获取穗粒
的特征数据。
36.可选地,断层图像以无符号16位整数的dicom格式存储,断层图像大小为512x512,分辨率为0.3mm,层间间隔也为0.3mm。
37.第二方面,本发明实施例还提供一种用于禾本科作物的ct扫描系统,包括:
38.ct探测组件和与该ct探测组件电连接的控制系统;所述ct探测组件能够上下移动探测,且能够360
°
旋转探测;
39.所述控制系统控制所述ct探测组件采集禾本科作物的ct投影图像,病执行上述第一方面任一所述的禾本科作物穗部生长发育的无损监测方法。
40.(三)有益效果
41.本发明的有益效果是:本发明的方法可以在活体中原位动态观测禾本科作物穗部籽粒灌浆等生长发育情况,为作物育种提供新的表型性状,同时为智能农业决策提供数据支撑。具体地,利用ct设备无损原位获得穗部的动态生长变化,利用多种图像分析处理技术完成穗部和籽粒的性状提取。
附图说明
42.图1a为本技术一实施例提供的一种禾本科作物穗部生长发育的无损监测方法的流程图;
43.图1b为本技术一实施例提供的水稻中单穗形状提取的流程示意图;
44.图2为图1b中阈值分割的示意图;
45.图3为图1b中稻穗分离的示意图;
46.图4为图1b中稻穗拼接的示意图;
47.图5为图1b中连通域合理性判断的示意图;
48.图6为稻穗体积变化的示意图;
49.图7为稻穗平均密度变化示意图;
50.图8为本技术一实施例提供的穗粒识别/追踪的示意图;
51.图9为图8中的穗粒分离与测量的示意图;
52.图10为图8中的籽粒形状追踪结果样例的示意图。
具体实施方式
53.为了更好的理解上述技术方案,下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更清楚、透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
54.实施例一
55.如图1a所示,本实施例提供一种禾本科作物穗部生长发育的无损监测方法,该方法具体包括:
56.s1、针对活体的禾本科作物,获取指定时间段内穗部各方位的ct 投影图像。
57.为更好的分析禾本科作物的穗部,本实施例中的指定时间段可以包括连续n天,且n天中每一天起始时间点和终止时间点均相同。
58.n为大于等于1的自然数。
59.s2、对所有的ct投影图像进行重建处理,获得多张ct断层图像。
60.s3、根据穗部分析策略,对ct断层图像进行单穗的提取处理,获取单穗的稻粒的特征数据。
61.举例来说,在禾本科作物为成熟期的水稻稻穗时,上述的特征数据可以包括:单穗的稻粒总体积、平均密度、穗长、和/或籽粒总数。
62.在实际应用中,所述方法还包括:
63.s4、根据指定时间段内相同时间点的特征数据进行数据处理,获取用于展示的穗部发育信息/图像信息。
64.例如,可以形成曲线图展示指定时间段内的穗部稻粒的生长发育情况,也可以形成穗部的发育过程示意图或表格等信息,本实施例不对齐限定,根据实际需要设置。
65.本实施例的方法可以在活体中原位动态观测禾本科作物穗部籽粒灌浆等生长发育情况,为作物育种提供新的表型性状,同时为智能农业决策提供数据支撑。例如,可以利用ct设备无损原位获得穗部的动态生长变化,利用多种图像分析处理技术完成穗部和籽粒的性状提取,由此,节省现有技术中观测稻穗籽粒灌浆的时间,同时提高观测的准确性且不破坏研究植物,实现研究同一禾本科作物不同阶段的生长发育情况。
66.实施例二
67.本发明实施例利中用ct断层扫描技术,可以获取植物指定部位(如水稻穗部)的三维构象,并从三维图像中提取所需分析部位的形状(如谷粒性状),实现3d拷种。
68.在本实施例中,应用大视野的ct成像可以在活体中原位动态观测植物指定部位(如稻穗籽粒灌浆等)的生长发育情况,为作物育种提供新的表型性状,同时为智能农业决策提供数据支撑。
69.本实施例的方法以获取水稻穗部的谷粒形状为例进行详细说明,本发明实施例的方法可包括如下的步骤:
70.a1、采集水稻穗部全方位的ct图像
71.具体地,将整个无损水稻整株放入x射线ct扫描系统的ct设备探测范围中,将射线源的电压和电流分别设定为90kv和3.2ma。
72.ct扫描系统在快速连续扫描模式下对稻穗部位进行扫描,以0.8
°
的步进角度对每个样本360
°
旋转采集总共450张投影图像,总共扫描耗时大约18s。每个样本每个角度均采集450张投影图像(不限定450张,本实施例以450张进行列举说明),该每一张投影图像属于局部图像。
73.在扫描完后,通过ct扫描系统集成的3d重建软件进行批量重建,每个样本重建结果保存成450张断层图像。
74.需要说明的是,在本实施例中,每一个样本均指的是每一株水稻,水稻穗部全方位的ct图像即为每个样本重建的450张断层图像。
75.在本实施例中,断层图像以无符号16位整数的dicom格式存储,断层图像大小为512x512,分辨力为0.3mm,层间间隔也为0.3mm,每个样本重建时间大约2分钟。特别说明的是,ct设备采集的数据输出格式为dicom。
76.a2、单穗形状提取流程
77.在单穗性状提取任务中,最终需要获取单穗的稻粒总体积、平均密度、穗长及籽粒总数。
78.如图1b所示,性状提取流程可分为6个阶段:阈值分割、稻穗分离、稻穗拼接、计算三维体数据连通域、连通域合理性的判定及性状提取。
79.参见图1b所示,其步骤包括:
80.a2-1、设置窗位、窗宽,从原始数据(即上述450张断层图像)大致分割出稻穗,实现阈值分割的目的。
81.当前ct扫描的原始数据为16位数据类型,若直接将原始数据映射成8位数据类型,将产生较大的压缩损失。为了防止数据压缩处理过程中信息的损失,在本实施例中中通过窗位窗宽的方式,从原450张断层图像中分割/提取想要的稻穗的roi,进而对提取的roi的图像/数据进行压缩处理,以便减少压缩损失且提高计算处理速度。
82.为了从ct图像中提取感兴趣区域(roi),可预先设置窗位窗宽的数值,针对每一断层图像,窗位可理解为想要的稻穗区域灰度范围的中间值,窗宽可为想要的稻穗区域的宽度。
83.通常,根据经验值设定,或者从某一张断层图像中人工分析窗位窗宽进而对本次操作的断层图像设置窗位窗宽。例如,根据经验值设置本次提取的roi的窗位(wl:3200),窗宽(ww:300),进而执行所有断层图像的分割,从所有断层图像中均分给出对应每一断层图像的roi,如图2所示的某一张断层图像的分割过程示意图。
84.将从断层图像中分割出的roi进行数据类型的转换,即将16位转换 /映射为8位,并进行保存,获得450张分割并映射后的roi数据。应说明的是,分割出来的roi是包括多穗图像信息的数据。
85.a2-2、根据数据采集过程中的贴牌识别(即标识)分离稻穗
86.当前断层图像对应的采集对象为整株水稻,每株水稻的稻穗包含 3~5穗。而在具体分析过程中,分析的对象为单穗,因此需将映射后的 roi数据中的稻穗进行分离,以便于后续的数据处理与分析。
87.在本实施例中单独设置的一个断层图像截图工具,可依据人工预先在稻穗上设置的标识一次性截取一批次的单穗图像。如图2所示,对于映射后的roi数据,通过贴牌标识辨识每一张roi数据中的单穗,并使用断层图像截图工具截取对应的单穗,即可分离得到单穗的断层序列,如图3所示。
88.由于贴牌上人工记录有时间信息,为此,所有样本为有时间序列的样本,按照贴牌对应的时间序列获取所有样本对应单穗的断层序列。
89.a2-3、稻穗拼接
90.本实施例使用的可上下移动且360
°
旋转的ct扫描系统中ct扫描的视野高度为135mm,水稻单分蘖的穗部长度在150mm左右,因此不可避免需要多次扫描才能获取完整的穗部数据。数据采集时每采集一次下降 50mm,即重叠85mm,共283层,如图4所示。
91.在图4中,由于每个单穗分多段采集,且每段是450个断层数据,每个断层为0.03mm,重叠85mm,通过计算可知,重叠的层数为283层。
92.图4展示了将上下批次采集的断层序列的重叠部分删除,剩余部分按照次序重新排列,即可完成拼接。
93.需要说明的是,由于存在机械误差,拼接普遍存在错位现象,但预估对结果的影响可以接受。即结合实际意义需取整,拼接后的单穗断层序列约为450张,误差可接受,实际中取450张。
94.a2-4、计算三维体数据连通域,以识别后的每一单穗中的籽粒
95.通过前述步骤的阈值分割、稻穗拼接,大致获取到信噪比较高的三维体数据即单穗的断层序列。由于单穗由若干籽粒组成,需要分离出单穗中的籽粒,则需要对单穗的断层序列进行处理。
96.在体数据中,某一体素与该体素上、下、左、右、前、后6个方向的任一相邻体素灰度值相近(即在某一灰度范围内),则可视为处于同一连通域。
97.为此,在本实施例中,按照6邻接为连通域的标准,对三维体数据进行遍历,计算出每个籽粒连通域,并给所有连通域分配从1开始的连续自然数标识。
98.在实际的数据处理过程中,存在籽粒粘连的情况,这会造成两个或多个籽粒被划分到同一个连通域中,此时需要对该连通域做腐蚀处理,直至粘连的籽粒划分开,然后重新计算连通域并分配标识。
99.a2-5、基于计算的连通域,进行去噪处理,获取仅含籽粒连通域的三维体数据
100.通过前述各步骤得到的单穗的三维体数据中除了籽粒,还包含有杂质、贴牌标签、秸秆等干扰信息。
101.在本步骤中,计算连通域的体积、对应连通域的包围盒 (boundingbox)的长宽高等属性,如图5所示,然后针对籽粒设定相关属性对应的阈值,即可滤除杂质、贴牌、秸秆等对应的连通域,获得仅含籽粒连通域的三维体数据(后称“去噪数据”)。
102.应说明的是,在对连通域去噪处理之后,即可对干净的连通域的籽粒进行分析,获取特征数据,如图1b所示。
103.由于每一个连通域对应一个籽粒,进而获取所有连通域的总体积、平均密度、穗长、籽粒总数,即对应计算的是连通域体素数量,连通域对应原图平均灰度值、连通域的纵向长度、连通域个数等。
104.实施例三
105.在实际应用中,还需要对穗粒进行操作,为更好的理解本发明实施例的方法,以下结合图6至图9说明穗粒的识别和追踪流程。
106.需要说明的是,本实施例中采集ct图像,并从ct图像中分离出单籽粒的过程和上述的a1和a2的步骤是相同的,在此不再详述。
107.即,稻穗图像预处理操作与单穗的处理步骤相似,对于穗粒的识别与追踪,也需要进行阈值分割、稻穗分离、稻穗拼接等操作,其操作如单穗提取的操作。
108.不同之处为:(1)由于radiant软件的功能限制,本实施例中可将稻穗拼接作为第一步骤;(2)radiant软件提供了这些操作接口,相关操作均使用该软件完成。
109.如图9所示,为使用radiant软件进行穗粒分离与测量的示意图,具体步骤包括:
110.1)利用radiant软件的剪切工具分割出单穗,然后在三维可视化功能的辅助下,识别、追踪时间序列的同一籽粒,再利用剪切工具分割出被追踪的籽粒。
111.需要说明的是稻穗和籽粒的性状,是在去噪数据基础上进行提取的。
112.①
穗部总体积
113.稻穗籽粒的总体积,在去噪数据中表征为非0体素的总体积。单个体素的体积为v=0.293
×
0.293
×
0.3mm3,统计去噪数据中的非0体素个数为 n,则稻穗总体积为v
总
=v
×
n,如图6和图7所示。
114.②
穗部相对平均密度
115.通过某个体素的ct值无法直接获取该体素密度值的绝对值,但可以用ct值来衡量对应体素密度值的相对值。
116.ct原始数据映射到8位数据类型为线性变换,因此对于稻穗的三维体数据而言,也可以用体素值作为对应的相对密度值。即以去噪数据i
mask
(二值)为权重(掩膜),以拼接后的三维体数据i的体素值为加权对象,计算加权和,然后对掩膜体素个数求平均值,即稻穗的相对平均密度其中{
·
}表示矢量列表化,i为列表{i
mask
}元素的索引值。
117.③
穗长
118.在灌浆期间,稻穗部位长度变化并不显著,且姿态多变,因此穗长这一性状为估计值。计算去噪数据连通域总体的纵向长度(断层层数) n
slice
,断层间距为0.3mm,即穗长l=n
slice
×
0.3mm。
119.④
单穗籽粒数
120.籽粒数为去噪数据连通域的个数。如下表1所示,为3株水稻中各1 穗的稻穗籽粒数与穗长统计数据(注:灌浆期籽粒数与穗长无明显变化,因此不追踪变化量)。
121.表1:
[0122][0123]
⑤
籽粒长、宽、高
[0124]
radiant软件提供了长度测量工具,因此直接在三维可视化工具中,先调整籽粒点云模型的视图,再利用长度测量工具进行测量,具体对应关系为:籽粒长度为籽粒点云模型正视图或侧视图的高度(长度);籽粒宽度、厚度分别为俯视图的长轴长、短轴长,如图9所示。
[0125]
也就是说,现有技术中都是人工连续多天进行数据采集,由于稻穗的非刚体性质和人工操作的误差,导致稻穗整体形态和籽粒的相对位置不断发生变化,因此在现有数据采集手段和算法上难以对穗粒进行识别和追踪。
[0126]
而在本技术中,本实施例中选择借助radiant软件,利用其三维点云可视化功能辅助人工进行识别,从而实现时间序列的同一籽粒的追踪,省时省力。
[0127]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例,或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机
可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0128]
本发明是参照根据本发明实施例的方法、设备(系统)和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。
[0129]
应当注意的是,在权利要求中,不应将位于括号之间的任何附图标记理解成对权利要求的限制。词语“包含”不排除存在未列在权利要求中的部件或步骤。位于部件之前的词语“一”或“一个”不排除存在多个这样的部件。本发明可以借助于包括有若干不同部件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的权利要求中,这些装置中的若干个可以是通过同一个硬件来具体体现。词语第一、第二、第三等的使用,仅是为了表述方便,而不表示任何顺序。可将这些词语理解为部件名称的一部分。
[0130]
此外,需要说明的是,在本说明书的描述中,术语“一个实施例”、“一些实施例”、“实施例”、“示例”、“具体示例”或“一些示例”等的描述,是指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0131]
尽管已描述了本发明的优选实施例,但本领域的技术人员在得知了基本创造性概念后,则可对这些实施例作出另外的变更和修改。所以,权利要求应该解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0132]
显然,本领域的技术人员可以对本发明进行各种修改和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也应该包含这些修改和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。