1.本发明涉及计算机领域,尤其涉及一种自动化获取目标物体特征点参数的方法。
背景技术:
2.姿态估计在机器人视觉、动作跟踪和单照相机定标等很多领域都有应用。在不同领域用于姿态估计的传感器是不一样的,在这里主要讲基于视觉的姿态估计。基于视觉的姿态估计根据使用的摄像机数目又可分为单目视觉姿态估计和多目视觉姿态估计。
3.目前许多研究方案基本都是基于激光点云来对目标姿态进行估计,其获得数据的硬件设备成本极高,且使用寿命短。同时其数据量大处理过程复杂且效率慢。
技术实现要素:
4.本发明的目的在于提供一种自动化获取目标物体特征点参数的方法,解决获取特征点参数效率低的问题。
5.为实现上述发明目的,本发明提供一种自动化获取目标物体特征点参数的方法,包括以下步骤:
6.s1.将图像采集装置安装于机械臂的末端,所述机械臂驱动所述图像采集装置对目标物体摄取二维图像;
7.s2.获取所述机械臂的机械臂坐标系,并基于手眼标定的方式获取所述图像采集装置与所述机械臂坐标系之间的相对位置关系;
8.s3.获取所述机械臂的位姿参数,并基于所述位姿参数和所述相对位置关系获取所述图像采集装置的机位位姿参数;
9.s4.获取所述图像采集装置中的图像投影坐标系和所述目标物体所在位置的世界坐标系;
10.s5.基于所述机位位姿参数、所述图像投影坐标系和所述世界坐标系获取所述二维图像中所述目标物体的目标位姿;
11.s6.基于所述目标位姿获取所述的目标物体的特征点参数。
12.根据本发明的一个方面,步骤s5中,包括:
13.s51.基于所述机位位姿参数、所述图像投影坐标系和所述世界坐标系获取所述图像采集装置与所述目标物体的相对位姿转换关系;
14.s52.基于所述相对位姿转换关系计算所述目标物体的目标位姿。
15.根据本发明的一个方面,步骤s51中,获取所述相对位姿转换关系后,对所述相对位姿转换关系的转换精度进行判断,若所述转换精度低于预设要求,则对所述相对位姿转换关系进行位置补偿。
16.根据本发明的一个方面,步骤s6中,获取所述目标物体的所述目标位姿后,基于所述目标位姿构建所述二维图像中所述目标物体的最小三维包络。
17.根据本发明的一个方面,所述最小三维包络为长方体包络。
18.根据本发明的一个方面,步骤s6中,选取所述最小三维包络上的特征点,并基于所述目标位姿计算出所述特征点的特征点参数。
19.根据本发明的一个方面,所述特征点为所述最小三维包络的顶点和中心点。
20.根据本发明的一种方案,实现了自动化的获取目标物体在二维图像中的特征点参数,有效的提高了获取参数的效率。进而,对于获取大量的不同二维图像的特征点参数的效率和精度有利。
21.根据本发明的一种方案,采用自动化的参数获取方法,保证了对于复杂的目标物体能够在短时间内获取足够的数据量,极大的提高了处理复杂的目标物体的图像效率。
22.根据本发明的一种方案,保证了在自动化获取目标物体的二维图像的同时,对相对位姿转换关系的修正。此外,通过对相对位姿转换关系的修正有效保证了后续获取特征点参数的精度,保障了样本参数的质量。
23.根据本发明的一种方案,将复杂的目标物体进行简化,进而可以更加容易且灵活的获取与目标物体位姿相关的特征点,这样对提高本发明的数据处理效率有利。
附图说明
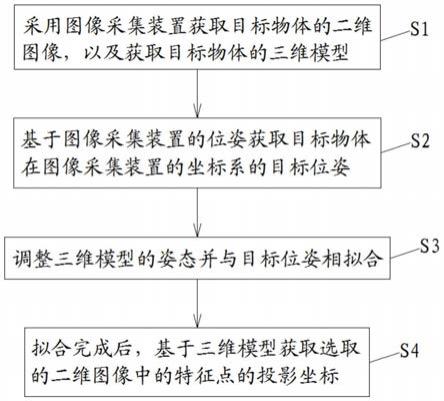
24.图1示意性表示根据本发明的一种实施方式的自动化获取目标物体特征点参数的方法的步骤框图。
具体实施方式
25.为了更清楚地说明本发明实施方式或现有技术中的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施方式,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.在针对本发明的实施方式进行描述时,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”所表达的方位或位置关系是基于相关附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本发明的限制。
27.下面结合附图和具体实施方式对本发明作详细地描述,实施方式不能在此一一赘述,但本发明的实施方式并不因此限定于以下实施方式。
28.如图1所示,根据本发明的一种实施方式,本发明的一种自动化获取目标物体特征点参数的方法,包括以下步骤:
29.s1.将图像采集装置安装于机械臂的末端,机械臂驱动图像采集装置对目标物体摄取二维图像;
30.s2.获取所述机械臂的机械臂坐标系,并基于手眼标定的方式获取所述图像采集装置与所述机械臂坐标系之间的相对位置关系;
31.s3.获取机械臂的位姿参数,并基于位姿参数和相对位置关系获取图像采集装置的机位位姿参数;
32.s4.获取图像采集装置中的图像投影坐标系和目标物体所在位置的世界坐标系;
33.s5.基于机位位姿参数、图像投影坐标系和世界坐标系获取二维图像中所述目标物体的目标位姿;
34.s6.基于目标位姿获取目标物体的特征点参数。
35.根据本发明的一种实施方式,步骤s5中,包括:
36.s51.基于机位位姿参数、图像投影坐标系和世界坐标系获取图像采集装置与目标物体的相对位姿转换关系;
37.s52.基于相对位姿转换关系计算目标物体的目标位姿。
38.根据本发明的一种实施方式,步骤s51中,获取相对位姿转换关系后,对相对位姿转换关系的转换精度进行判断,若转换精度低于预设要求,则对相对位姿转换关系进行位置补偿。
39.通过上述设置,保证了在自动化获取目标物体的二维图像的同时,对相对位姿转换关系的修正。此外,通过对相对位姿转换关系的修正有效保证了后续获取特征点参数的精度,保障了样本参数的质量。
40.根据本发明的一种实施方式,步骤s6中,获取目标物体的目标位姿后,基于目标位姿构建二维图像中目标物体的最小三维包络。在本实施方式中,最小三维包络为长方体包络。
41.根据本发明的一种实施方式,步骤s6中,选取最小三维包络上的特征点,并基于目标位姿计算出特征点的特征点参数。在本实施方式中,所选取的特征点为最小三维包络的顶点和中心点。
42.通过上述设置,将复杂的目标物体进行简化,进而可以更加容易且灵活的获取与目标物体位姿相关的特征点,这样对提高本发明的数据处理效率有利。
43.上述内容仅为本发明的具体方案的例子,对于其中未详尽描述的设备和结构,应当理解为采取本领域已有的通用设备及通用方法来予以实施。
44.以上所述仅为本发明的一个方案而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。