1.本发明属于环境检测技术领域,特别涉及一种基于激光雷达智能检测树木倒伏的方法。
背景技术:
2.在林地中,由于大风天气、强降雨天气或是人为损坏,经常会有树木倒伏的情况发生,若不及时采取措施,会影响树木的正常生长,造成树木质量下降,严重者甚至死亡。而一些发生在道路旁的树木倒伏,更会严重影响交通安全,所以对于树木倒伏的情况需要及时处置。
技术实现要素:
3.本发明实施例之一,一种基于无人机载激光雷达的树木倒伏检测方法。采用具有机载激光雷达的无人机飞临待观测林地;获取飞行器机载激光雷达数据,将激光雷达数据数据与飞行导航定位数据结合,得到带地理坐标信息的待观测林地的点云数据;将所述点云数据进行归一化处理;设置搜寻阈值,使用基于chm冠层高度模型的分水岭分割算法,得到可能存在树木倒伏区域位置;基于前一步骤生成种子点,进行地面种子点生长,计算其弯曲角度判断是否为倒伏树木,并返回其坐标信息。
4.本发明采用激光雷达点云处理,实现了点云附带地理信息和树木的分割,为倒伏树木判定节省了计算时间,并且提升了数据的精度,有利于大面积树木倒伏的调查。
附图说明
5.通过参考附图阅读下文的详细描述,本发明示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本发明的若干实施方式,其中:
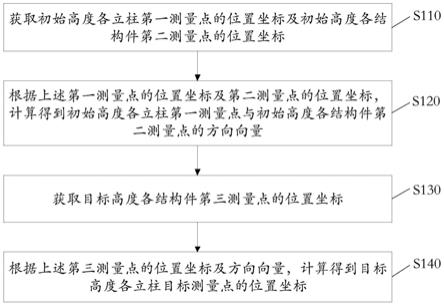
6.图1根据本发明实施例之一的树木倒伏检测方法处理流程图。
具体实施方式
7.倒伏是树木风灾的常见后果,树木倒伏后很难存活。树木倒伏带来经济损失的同时也使生态平衡遭到了破坏,环境受到影响。树木倒伏的另一灾害就是影响人类生命安全。因此,需要对树木倒伏的情况进行观测评估,以采取相应的措施,降低危害和损失。
8.现在对于树木倒伏的评估方法有观测经验法、归纳统计法、力学模型法等。具体来说,
9.(1)观测经验法,是通过观测林木的形态特征和缺陷实现对树木倒伏风险性评估,这种方法准确度取决于评估人的知识水平。缺陷评估内容主要包括树洞、裂纹、枯萎程度、溃伤以及结构缺陷,然而这种方法只是定性判断树木的倒伏情况,但想要更加精准的评估就无法进行了。
10.(2)归纳统计法,对某地区长时间的树木进行检测并进行回归分析,可以得到一些较为重要的因素,甚至可以分析出树木倒伏发生时所处的风力等级范围。我国大多数树木倒伏的评估方法也采用的是统计法,但这个方法也存在一定的缺陷,需要大量的观测数据进行回归预测,而且预测的结果也不能很好的说明树木各种参数与倒伏之间的关系,所以得出的结论仅能在实验地区使用,局限性较大。
11.(3)力学模型法,相较于前两种方法解决了它们的缺点,可以通过建立力学模型的方式在大部分立地环境中计算出树木倒伏的临界风速,具体来讲,力学模型是一种定量分析的方法,可以有效避免观测经验法和归纳统计法中预测说带来的模糊性,但是大部分的力学模型并不是特别完善,只专注于树木的力学性质,忽略了树木倒伏的生成因素是多样的、复杂的。所以使用现有力学模型得出的结果与实际情况还是有一定差距的。
12.(4)激光雷达,是一种新型的主动式遥感技术,能够精确的获取对象相较于激光发射器的三维坐标信息,在三维冠层信息的获取方面有极大的优势。激光雷达系统可以用于林木高度估测,但是由于激光雷达获取数据时,受天气、地形、成本等因素的影响较大,例如激光雷达在雾天进行测量时会产生大量噪点,所以也有一定局限性。
13.根据一个或者多个实施例,一种树木倒伏检测方法,使用激光雷达点云数据判断树木倒伏位置及情况,以便能够及时进行反馈。该方法包括:获取机载激光雷达数据,将激光雷达数据数据与pos文件进行解算得到带地理坐标信息的点云数据;将点云数据进行归一化处理;设置搜寻阈值,使用基于chm冠层高度模型的分水岭分割算法,得到可能存在倒伏区域位置;基于上一步生成种子点,进行地面种子点生长,计算其弯曲角度判断是否为倒伏树木并返回其坐标信息。对于其中步骤的具体处理过程包括,
14.(1)采集激光雷达数据,原始机载激光数据仅包含每个激光点的发射角、测量距离、反射率等信息,原始数码影像数据也只是普通的数码影像,都没有坐标、姿态等空间信息,只有在经过数据预处理后,才能完成激光和影像数据的“大地定向”,具有空间坐标和姿态等信息。将地面基准站gps接收机采集的数据与机载gps接收机接收的数据进行载波相位差分处理,得到飞行平台精确的三维坐标;将gps数据与imu姿态数据以卡尔曼滤波融合可以描述不同时刻激光扫描仪的空间位置以及姿态(即外方位元素),结合航迹文件、激光测距数据,并设置大气校正参数、距离校正参数、扫描仪校正参数、pos误差允许参数及输出文件的路径、输出文件的格式和输出文件的选项,运行后得到las点文件。
15.检校后的激光点云数据为wgs84 utm投影坐标系,需要根据需求坐标系进行坐标系的转换,若区域覆盖较小则可以直接使用四参数进行转换,否则需要进行像控点布设使用七参数转换坐标系。
16.(2)将处理完成的点云数据归一化处理,归一化处理首先需要使用点云生产数字地形模型(dtm),本方法采用的是先利用点云数据生成数字表面模型(dsm),再使用布料滤波(csf)方法进行地面点的分离,得到数字高程模型(dem);将dsm与dem相减的差值则为归一化后的点云数据。
17.(3)根据飞行区域主要树种类别设置经验阈值,使用基于chm冠层高度模型的分水岭分割算法将树木进行分割。该算法实施的步骤为:
18.将点云按其高度视为灰度图像;把梯度图像中的所有像素按照灰度值进行分类,并设定一个测地线阈值;找到灰度值最小的像素点(默认标记为灰度值最低点),让阈值从
最小值开始增长,这些点为起始点;水平面(灰度阈值)在增长的过程中,会碰到周围的邻域像素,测量这些像素到起始点(灰度值最低点)的测地线阈值,如果小于设定测地线阈值,则将这些像素淹没,否则在这些像素上设置大坝(区域边界),这样就对这些邻域像素进行了分类。随着水平面越来越高,会设置更多更高的大坝,直到灰度值的最大值,所有区域都在分水岭线(图像极大值点)上相遇,这些大坝就对整个图像像素的进行了分区。返回到点云中就完成了对树木的分割。计算低于阈值的区域设置为疑似倒伏区。这里涉及的测地线阈值和灰度阈值,其中,测地线阈值为经验参数,需要针对不同树种进行实验得出。灰度阈值则会根据迭代次数增长。
19.(4)在疑似倒伏区进行基于地面种子点生长,设置生长弯曲阈值,根据林业标准树木弯曲60度则可认为倒伏。当生长弯曲角度大于阈值时则判定该树木为倒伏树木,且由于部分树木倒伏部分由根部开始,如进行此类计算无法判定其弯曲程度,所以同时设置生长时若高度小于最小树木高度阈值则判定其为倒伏。
20.本发明的一种基于机载激光雷达点云判断树木倒伏的方法,有益效果包括:
21.使用带有地理信息位置的点云进行计算,得出结果后可以迅速返回倒伏坐标,实现快速树木倒伏检测;对点云数据进行预处理先将其归一化使得点云在起伏地形上也不会出现高度计算错误,使得整体计算结果更为精确;使用分水岭切割的算法将每颗树木进行分割,筛选出疑似倒伏区域减少下一步计算量,提高整体运行效率;最终使用限制生长角度的地面种子点生长方法对树木进行是否倒伏状态进行判定,若是倒伏则返回生长位置信息,能够高效的帮助林业工人更快速的寻找到倒伏树木。
22.值得说明的是,虽然前述内容已经参考若干具体实施方式描述了本发明创造的精神和原理,但是应该理解,本发明并不限于所公开的具体实施方式,对各方面的划分也不意味着这些方面中的特征不能组合,这种划分仅是为了表述的方便。本发明旨在涵盖所附权利要求的精神和范围内所包括的各种修改和等同布置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。