1.本发明涉及无线通信技术领域,特别涉及一种感测参数估计方法、设备及存储介质。
背景技术:
2.新兴的jcas(联合通信和无线电感测,joint communication and radio sensing)技术将通信和雷达感测功能融合到一个系统中,共享单个发射信号和多个硬件信号处理模块。融合不仅可实现减小尺寸、降低功耗和成本以及提高频谱效率的直接益处,而且还有助于使用感测信息建立通信链路,反之亦然。jcas技术能够应用在未来的移动网络中,以使网络可感知。pmn(感知移动网络,perceptive mobile network)的概念引入后,从当前的仅通信的移动网络进行演变,期望pmn用作无所不在的无线电传感网络,同时提供毫无妥协的移动通信服务。
3.pmn中存在一个可选的收发器设置,用于在pmn中实现jcas,类似于其中感测接收器与发射器物理分离的双基地雷达。这样的设置仅需要最少的网络更改就能够实现,并且在短期内是最受欢迎的选项。该设置与上行链路感测一致,其中发射器和感测接收器在物理上是分开的。pmn中这种设置的主要挑战是感测接收器和发射器之间不适用时钟级别同步,并且由于移动网络中丰富的多路径环境,aoa(到达角,angle-of-arrival)的精度相对较低。有方案假设了完美的同步,但没有解决感测接收器和发射器之间的异步问题。如果在感测接收器和发射器之间没有时钟级别的同步,则可能导致to(定时偏移,timing offsets)和cfo(载波频率偏移,carrier frequency offsets),这会导致感测中的对于延迟和多普勒频率进行估计的模糊以及准确性降低。
4.基于cacc(跨天线互相关,cross-antenna cross-correlation)方法来处理异步收发器的无源wifi感测相关的工作数量有限。cacc的基本原理是,一个设备中多个天线上的to是相同的,因此可以通过计算来自多个接收天线的信号之间的互相关来消除。有方案中,cacc用于解决利用商品wifi设备进行无设备人员跟踪的aoa估计问题。在另一方案中,cacc用于解决使用单个wifi链路进行无源人员跟踪的测距估计问题。遗憾的是,cacc方法存在一个严重的衍生问题:由于互相关,cacc的输出包含镜像的未知参数。镜像的参数不仅会导致未知参数数量加倍,而且会模糊多普勒频率的符号,降低感测精度。有方案提出了一种ams(加减抑制,add-minus suppression)方法来抑制一半的镜像参数并提取实际参数。但是,ams方法易受静态和动态信号传播路径的功率分布的影响。
5.现有的参数感测算法,例如ams方法,至少存在以下两个问题之一:
6.1、输入信号具有大量的近似误差。
7.2、aoa的分辨率有限。
技术实现要素:
8.本发明提供了一种感测参数估计方法、设备及存储介质,用以解决参数感测算法
中存在的输入信号具有大量的近似误差、aoa的分辨率有限的问题。
9.本发明提供以下技术方案:
10.一种感测参数估计方法,包括:
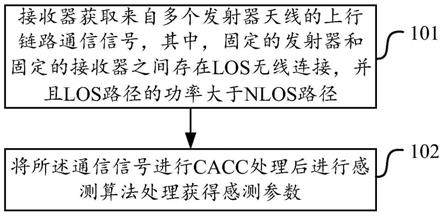
11.接收器获取来自多个发射器天线的上行链路通信信号;
12.将所述通信信号进行cacc处理后进行感测算法处理获得感测参数,其中,所述cacc处理是指将所述通信信号作为参考信号,将其他天线的信号和该参考信号做相关运算。
13.实施中,所述上行链路通信信号是每个ofdm分组的前导码。
14.实施中,所述前导码是第m前导码符号的在第g副载波上传输的调制符号,其中,每个前导码符号具有g个副载波,副载波间隔为1/t,其中t表示ofdm符号的长度。
15.实施中,第m前导码符号为:
[0016][0017]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号,并且表示长度为t tc的矩形窗口。
[0018]
实施中,将所述通信信号进行cacc处理,包括:
[0019]
接收到上行链路通信信号后,去除cp之后,通过g点fft将信号变换到频域信号,对频域信号进行cacc处理。
[0020]
实施中,所述频域信号为:
[0021][0022][0023]
其中,是在第m ofdm前导码符号的第n接收天线处的第g副载波上的接收到的频域信号,并且是平均值为零且方差为σ2的复awgn。
[0024]
实施中,对频域信号进行cacc处理前,进一步包括:
[0025]
抵消前导码的模量效应。
[0026]
实施中,按以下方式抵消前导码的模量效应:
[0027][0028]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号。
[0029]
实施中,按下式进行cacc处理:
[0030]
[0031]
其中,其中,并且
[0032]
实施中,进一步包括:
[0033]
在m和g上使用高通滤波器来获得高通分量。
[0034]
实施中,按如下方式获得高通分量后进行感测算法处理:
[0035][0036]
实施中,对后进行感测算法处理,包括:
[0037][0038]
其中,a(ω
l
′
)=exp[jω
l
′
(1,
…
,n-1)]是维度为(n-1)
×
1的阵列响应向量。
[0039]
实施中,进一步包括:
[0040]
将空间域与其他域进行组合用以扩大阵列响应向量的维数。
[0041]
实施中,按以下方式将空间域与其他域进行组合用以扩大阵列响应向量的维数:
[0042][0043]
其中,满足4l/(n-1)<c<min(g-4l,m-4l),c
′
[m,g]的维度是c(n-1)
×
2,c
′
[m,g]的第一列是与空间角度域和频延迟域对应的扩大向量,第二列是与空间角度域和时多普勒频率域对应的扩大向量。
[0044]
实施中,按如下方式将c
′
[m,g]形成矩阵:
[0045]
c=[c
′
[0,0],c
′
[0,1,
…
,c
′
[0,d]],
ꢀꢀ
(13)其中满足c d<min(m,g),对于c的多个列,基向量由和表示,其中l
′
∈{
±
1,
…
,
±
l}。
[0046]
实施中,所述感测参数包括以下参数之一或者其组合:
[0047]
传播延迟、多普勒频率、aoa。
[0048]
实施中,按以下方式确定传播延迟和多普勒频率:
[0049][0050]
和
[0051][0052]
其中,表示取得与括号中函数的个最大峰值对应的个估计值的运算,τ
′
∈(0,π)和f
′
∈(-π,π)是测试值,是c的向量跨越的空间中的零空间,即与从第(4l 1)列到第c(n-1)列的各列对应的c的左奇异矩阵,使ω
l
′
和τ
′
l
分别为ω0和测试值-τ
′
,c1(ω0,-τ
′
)与公式(12)中的具有相同的表示形式,使ω
l
′
和τ
′
l
分别为ω0和测试值-f
′
,c2(ω0,-f
′
)与具有相同的表示形式,其中:c
′
[m,g]的第一列是与空间(角度)域和频(延迟)域对应的扩大向量,c
′
[m,g]的第一列的基向量:
[0053][0054]
实施中,进一步包括:
[0055]
将每个延迟估计值与每个多普勒频率估计值配对匹配。
[0056]
实施中,将每个延迟估计值与每个多普勒频率估计值配对匹配,包括:
[0057]
从公式(14)和公式(15)获得的软估计值表示为和存在种配对匹配的可能性,即:
[0058][0059]
实际的估计值对在将ξn[m,g]进行组合的下面的函数中应当具有最大组合增益:
[0060][0061]
选择使p
ξ
(l
x
,ly)的绝对值最大的个候选中的一个,假设获得的对中被选择的
索引为从候选集合中去除这个对,确定一对多普勒频率和延迟;
[0062]
在去除对之后,候选的数量减少到即匹配下一对多普勒频率和延迟;
[0063]
重复过程l次,匹配总共l对多普勒频率和传播延迟。
[0064]
实施中,进一步包括:
[0065]
根据传播延迟和多普勒频率估计aoa。
[0066]
实施中,根据传播延迟和多普勒频率估计aoa,包括:
[0067]
确定传播延迟和多普勒频率后,从公式(18)获得l个nlos aoa估计值:
[0068][0069]
其中,ω
′
∈(-π,π)是测试值,对于每对延迟和多普勒频率,获得一个估计值作为nlos aoa估计值。
[0070]
一种接收器,包括:
[0071]
处理器,用于读取存储器中的程序,执行下列过程:
[0072]
获取来自多个发射器天线的上行链路通信信号;
[0073]
将所述通信信号进行cacc处理后进行感测算法处理获得感测参数,其中,所述cacc处理是指将所述通信信号作为参考信号,将其他天线的信号和该参考信号做相关运算;
[0074]
收发机,用于在处理器的控制下接收和发送数据。
[0075]
实施中,所述上行链路通信信号是每个ofdm分组的前导码。
[0076]
实施中,所述前导码是第m前导码符号的在第g副载波上传输的调制符号,其中,每个前导码符号具有g个副载波,副载波间隔为1/t,其中t表示ofdm符号的长度。
[0077]
实施中,第m前导码符号为:
[0078][0079]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号,并且表示长度为t tc的矩形窗口。
[0080]
实施中,将所述通信信号进行cacc处理,包括:
[0081]
接收到上行链路通信信号后,去除cp之后,通过g点fft将信号变换到频域信号,对频域信号进行cacc处理。
[0082]
实施中,所述频域信号为:
[0083][0084]
其中,是在第m ofdm前导码符号的第n接收天线处的第g副载波上的接收到的频域信号,并且是平均值为零且方差为σ2的复awgn。
[0085]
实施中,对频域信号进行cacc处理前,进一步包括:
[0086]
抵消前导码的模量效应。
[0087]
实施中,按以下方式抵消前导码的模量效应:
[0088][0089]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号。
[0090]
实施中,按下式进行cacc处理:
[0091][0092]
其中,其中,并且
[0093]
实施中,进一步包括:
[0094]
在m和g上使用高通滤波器来获得高通分量。
[0095]
实施中,按如下方式获得高通分量后进行感测算法处理:
[0096][0097]
实施中,对后进行感测算法处理,包括:
[0098][0099]
其中,a(ω
l
′
)=exp[jω
l
′
(1,
…
,n-1)]是维度为(n-1)
×
1的阵列响应向量。
[0100]
实施中,进一步包括:
[0101]
将空间域与其他域进行组合用以扩大阵列响应向量的维数。
[0102]
实施中,按以下方式将空间域与其他域进行组合用以扩大阵列响应向量的维数:
[0103][0104]
其中,满足4l/(n-1)<c<min(g-4l,m-4l),c
′
[m,g]的维度是c(n-1)
×
2,c
′
[m,g]的第一列是与空间角度域和频延迟域对应的扩大向量,第二列是与空间角度域和时多普勒频率域对应的扩大向量。
[0105]
实施中,按如下方式将c
′
[m,g]形成矩阵:
[0106]
c=[c
′
[0,0],c
′
[0,1],
…
,c
′
[0,d]],
ꢀꢀ
(13)
[0107]
其中满足c d<min(m,g),对于c的多个列,基向量由和表示,其中l
′
∈{
±
1,
…
,
±
l}。
[0108]
实施中,所述感测参数包括以下参数之一或者其组合:
[0109]
传播延迟、多普勒频率、aoa。
[0110]
实施中,按以下方式确定传播延迟和多普勒频率:
[0111][0112]
和
[0113][0114]
其中,表示取得与括号中函数的个最大峰值对应的个估计值的运算,τ
′
∈(0,π)和f
′
∈(-π,π)是测试值,是c的向量跨越的空间中的零空间,即与从第(4l 1)列到第c(n-1)列的各列对应的c的左奇异矩阵,使ω
l
′
和τ
′
l
分别为ω0和测试值-τ
′
,c1(ω0,-τ
′
)与公式(12)中的具有相同的表示形式,使ω
l
′
和τ
′
l
分别为ω0和测试值-f
′
,c2(ω0,-f
′
)与具有相同的表示形式,其中:c
′
[m,g]的第一列是与空间(角度)域和频(延
迟)域对应的扩大向量,c
′
[m,g]的第一列的基向量:
[0115][0116]
实施中,进一步包括:
[0117]
将每个延迟估计值与每个多普勒频率估计值配对匹配。
[0118]
实施中,将每个延迟估计值与每个多普勒频率估计值配对匹配,包括:
[0119]
从公式(14)和公式(15)获得的软估计值表示为和存在种配对匹配的可能性,即:
[0120][0121]
实际的估计值对在将ξn[m,g]进行组合的下面的函数中应当具有最大组合增益:
[0122][0123]
选择使p
ξ
(l
x
,ly)的绝对值最大的个候选中的一个,假设获得的对中被选择的索引为从候选集合中去除这个对,确定一对多普勒频率和延迟;
[0124]
在去除对之后,候选的数量减少到即匹配下一对多普勒频率和延迟;
[0125]
重复过程l次,匹配总共l对多普勒频率和传播延迟。
[0126]
实施中,进一步包括:
[0127]
根据传播延迟和多普勒频率估计aoa。
[0128]
实施中,根据传播延迟和多普勒频率估计aoa,包括:
[0129]
确定传播延迟和多普勒频率后,从公式(18)获得l个nlos aoa估计值:
[0130][0131]
其中,ω
′
∈(-π,π)是测试值,对于每对延迟和多普勒频率,获得一个估计值作为nlos aoa估计值。
[0132]
一种感测参数估计装置,包括:
[0133]
接收模块,用于利用接收器获取来自多个发射器天线的上行链路通信信号;
[0134]
处理模块,用于将所述通信信号进行cacc处理后进行感测算法处理获得感测参数,其中,所述cacc处理是指将所述通信信号作为参考信号,将其他天线的信号和该参考信号做相关运算。
[0135]
一种计算机可读存储介质,所述计算机可读存储介质存储有执行上述感测参数估计方法的计算机程序。
[0136]
本发明有益效果如下:
[0137]
在本发明实施例提供的技术方案中,解决了使用上行链路通信信号进行感测参数估计中的两个问题:异步的发射器和接收器;天线数量少的接收器。
[0138]
上行链路通信中几何分离的发射器和接收器通常在时钟级别上异步。由时钟异步引起的定时偏移在分组之间变化。这样的异步通常将在感测期间引入定时模糊并因此引入测距模糊,并且妨碍使用多个分组来进行感测参数估计。
[0139]
对于小型基站,阵列中天线元件的数量通常受到限制。因此,估计多路径信号到达角的能力受到限制。更具体地说,能够估计的路径数量通常等于或小于天线数量的一半。
[0140]
在本发明实施例提供的技术方案中,由于基于跨天线互相关(cross-antenna cross correlation,cacc)运算,因此解决这两个挑战性问题,这使得能够将上行链路通信信号直接用于无线电感测,而无需在当前网络中进行任何重大改变。还能够估计数量比天线数量多得多的路径,因此在小型基站中进行感测也变得可能。
附图说明
[0141]
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0142]
图1为本发明实施例中感测参数估计方法实施流程示意图;
[0143]
图2为本发明实施例中用于上行链路感测的系统模型的示意图;
[0144]
图3为本发明实施例中在ue基带中传输的ofdm分组的示意图;
[0145]
图4为本发明实施例中处理基本方案的示意图;
[0146]
图5为本发明实施例中感测算法的示意图;
[0147]
图6为本发明实施例中接收器结构示意图;
[0148]
图7为本发明实施例中的mse与snr和路径数量的关系示意图;
[0149]
图8为本发明实施例中所有三个参数的mse与snr的关系示意图。
具体实施方式
[0150]
发明人在发明过程中注意到:
[0151]
在利用通信信号进行的感测中,包括移动蜂窝通信、wifi通信等等,单天线发射机(illuminator)向多天线接收机发送上行链路信号。利用异步收发器,多个接收信号由下式给出:
[0152][0153]
其中,yn[m,g]是第m时隙的副载波g在第n接收天线处的接收信号,α
l
、ω
l
、f
d,l
和τ
l
分别是来自第l路径的复增益、aoa、多普勒频率和延迟,zn[m,g]是噪声项,δf(m)和δ
τ
(m)是如上所述的异步收发器所产生的cfo和to,t是一个ofdm(正交频分复用,orthogonal frequency division multiplex)符号的时间窗口,ta是两个时隙之间的时间间隔,dn[m,g]是来自l=第0路径的接收信号,in[m,g]是来自其余路径的信号,即l={1,
…
,l}。
[0154]
接着,ams方法获得两个信号。一个是另一个是其中是yn[m,g]是m和g上的平均值。使用互相关将an[m,g]与bn[m,g]进行如下组合。
[0155][0156]
ams方法忽略并且使用作为输出来执行参数估计。通常music算法可以适用于根据ρn[m,g]估计τ
l
和f
d,l
。如下示出基于ams的算法的示意图。
[0157]
现有的参数感测算法,例如ams方法,至少存在以下两个问题之一:
[0158]
1、输入信号具有大量的近似误差。很明显,ams方法中至少存在两个近似误差。一个是公式(2)和公式(3)之间的误差。这种近似使用的假设是los(视距传播,line of sight)路径的功率比nlos(非视距传播,non-line-of-sight)路径的功率强得多。因此,在丰富的多路径环境中,误差将大大增加。另一个是由公式(3)中的造成的。公式(3)中的输出不是实际的感兴趣信号,即此外,以上所有结果都是在忽略噪声项的情况下得出的。在包括噪声项的情况下,近似误差将会更加急剧地增大。
[0159]
2、大多数先前的工作在天线(空间)域中分别估计了aoa。在当前的移动网络中,天线的数量不是很多。因此,aoa的分辨率有限。
[0160]
基于此,本发明提供了一种感测参数估计方案,下面结合附图对本发明的具体实施方式进行说明。
[0161]
图1为感测参数估计方法实施流程示意图,如图所示,可以包括:
[0162]
步骤101、接收器获取来自多个发射器天线的上行链路通信信号;
[0163]
步骤102、将所述通信信号作为参考信号与其他天线的信号和它做相关运算后进
行感测算法处理获得感测参数。
[0164]
实施中,步骤101中接收器获取来自多个发射器天线的上行链路通信信号,固定的发射器和固定的接收器之间存在los无线连接,并且los路径的功率大于nlos路径;
[0165]
步骤102中用一个接收机的天线输入作为参考信号,别的天线的信号和它做相关运算也即cacc处理。
[0166]
首先对实施的环境,也即系统设置进行说明。
[0167]
在pmn中,多个用户设备(ue)与基站(bs)通信。bs在物理上是静态的并且使用接收的上行链路信号用于通信和感测。每个ue有一个天线,bs具有有限数量的n个天线。图2为用于上行链路感测的系统模型的示意图,在本发明实施例中提出的方案至少可以在图中所示的基本系统设置中实施,如图2所示:
[0168]
用于感测的信号来自位置固定且对bs已知的特定ue。
[0169]
bs与ue之间存在los传播路径用于感测。los路径的功率比非los(nlos)路径的功率高得多。
[0170]
该设置能够广泛应用于多种通信系统结构,例如移动蜂窝通信、wifi通信网络、bluetooth(蓝牙)、rfid(射频识别/电子标签,radio frequency identification)等等,是一种在收发机不同步的无线通信网络中实现雷达感知的方案。
[0171]
本发明实施例提供的方案用来感测移动网络中的目标。固定的ue可以是在移动网络中提供固定宽带接入的节点。实施中,可以采用毫米波频段来保证los路径的主导功率。在不失一般性的情况下,可以考虑通过来自特定ue(实施例中将称为ue 1)的上行链路信号进行感测。ue 1和bs之间没有同步。
[0172]
图3为在ue基带中传输的ofdm分组的示意图,在所有ue处,采用简化的分组结构,如图3所示。在每个分组中,训练符号(表示为前导码)后接数据符号序列。ofdm调制应用于整个分组。实施中,将ofdm前导码用于感测。也即,所述上行链路通信信号是每个ofdm分组的前导码。前导码还可以用于通信的同步和信道估计,这需要在bs处的不同处理。在本方案中,将使用前导码来感测多个目标。需要获取目标的参数,包括传播延迟、多普勒频率和aoa。也即,所述感测参数包括以下参数之一或者其组合:传播延迟、多普勒频率、aoa。
[0173]
在不失一般性的前提下,假设每个分组只有一个前导码。对于前导码符号和数据符号,它们每个都具有g个副载波,副载波间隔为1/t,其中t表示ofdm符号的长度。每个ofdm符号前面都有一个周期tc的循环前缀(cp)。当且仅当具有交错间隔的副载波的分段对于ue 1可用时,本发明实施例中的方案才进行操作。当多个ue与bs通信时,每个ue都占据具有交错间隔的副载波的唯一分段。为了符号的简化,在此假设ue 1占据了整个前导码符号。数学上,第m前导码符号可以表示如下:
[0174][0175]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号,并且表示长度为t tc的矩形窗口。
[0176]
bs使用n天线的ula(均匀线性阵列,uniform linear array)来接收前导码。bs处
的接收器与ue 1处的发射器之间的上行链路信道具有从l个目标反射或折射的l个nlos,以及主导los路径,其中los路径的索引表示为l=0。α
l
、f
d,l
、τ
l
和θ
l
分别表示第l路径的信道增益、多普勒频率、传播延迟和aoa。由于bs和ue 1的固定位置,假设对应于los路径的参数τ0和θ0对于bs是已知的,并且f
d,0
为0。还假设需要注意的是,第l路径的多普勒频率源信道的第l目标,取决于移动方向可以为正或为负。
[0177]
假设在ue基带以相同间隔(表示为ta)发送m个分组。由于bs与ue1之间在时钟级别上不同步,即使实现了分组级别的同步,接收信号也具有与时钟异步相关联的未知时变定时偏移(to),表示为δ
τ
(m)。因此,bs所看到的对于第l目标的信号传播期间的总时间延迟等于τ
l
δ
τ
(m)。还存在由于异步载波频率而导致的时变载波频率偏移(cfo),表示为δf(m)。与第m分组中的前导码对应的接收到的时域信号可以表示为:
[0178][0179]
其中,向量a(ω
l
)=exp[jω
l
(0,1,
…
,n-1)]
t
是大小为n
×
1的阵列响应向量,ω
l
为d表示天线间距,λ表示波长,θ
l
为来自第l目标的aoa,z(t|m)是平均值为零且方差为σ2的awgn(复加性白高斯噪声,additive-white-gaussian-noise)向量。to通常是时变的,并且具有在任意两次不连续的传输期间变化的随机值。cfo可以随时间缓慢变化。需要注意的是,to和cfo分别与实际的传播延迟和实际的多普勒频率混合。因此,它们能够直接引起测距和速度测量的模糊。它们还使得总延迟和总多普勒频率随时间而变化,并且妨碍对于信号进行收集而用于联合处理。应当注意的是,为了通信目的,不需要区分具有这些偏移的实际参数,因为它们可以被作为一个整体值来估计然后消除。为了雷达感测目的,由于目标的范围和速度仅取决于实际参数,所以必须减少这些偏移。需要注意的是,实施中使用近似因为定时值(δ
τ
(m) τ
l
)远小于ta,并且(f
d,l
δf(m))也相对于采样速率较小。
[0180]
在从接收的时域信号去除cp之后,接着通过g点快速傅里叶变换(fft)将信号变换到频域。接收到的频域信号为:
[0181][0182]
其中,是在第m ofdm前导码符号的第n接收天线处的第g副载波上的接收到的频域信号,并且是平均值为零且方差为σ2的复awgn。需要说明的是,公式(6)中
的接收信号除了存在前导码以外具有与公式(1)相同的表达形式。
[0183]
下面对信号处理方案进行说明。
[0184]
正如前述提到的,实际延迟和多普勒频率分别与to和cfo混合在一起。在本发明实施中提出了一种通过组合来自空间、时间和频域的测量结果的高分辨率的软参数估计算法。当bs处的天线数量少时,提出的算法特别有用。该方案主要包括两个模块:cacc处理和感测算法,图4为处理基本方案的示意图,如图所示,将来自多个天线的输入通信信号进行cacc处理后进行感测算法处理,输出感测参数估计值。
[0185]
实施中,还使用cacc减少cfo和to。在应用cacc之前,可以先抵消前导码的模量效应。由于x[m,g]是bs的已知值,可以将yn[m,g]除以x[m,g],即:
[0186][0187]
不同于ams方法,实施中,对接收到的信号执行cacc,由下式给出:
[0188][0189]
其中,其中,并且
[0190]
接着,通过在m和g上使用高通滤波器来获得高通分量。简单的高通滤波器可以通过去掉ρn[m,g]的平均值(表示为ρn)来实现。来自高通滤波器的输出为:
[0191][0192]
需要说明的是,方案中将使用作为输入来估计所有的参数,在没有噪声项的情况下,近似误差仅源于因此,本发明实施例提供的方案与ams方法相比输入误差较少。
[0193]
在所有天线上收集ξn[m,g],形成如下向量:
[0194][0195]
其中,a(ω
l
′
)=exp[jω
l
′
(1,
…
,n-1)]是维度为(n-1)
×
1的阵列响应向量。需要说明的是,阵列响应向量的长度由于cacc运算而减小到n-1。由于天线数量少,仅在空间域中估计aoa的性能并不是最佳效果,因此,实施中旨在将空间域与其他域进行组合来扩大阵列响应向量的维数。使用c[m,g],生成一个矩阵,该矩阵具有扩大后的阵列响应向量的维度,由下式给出:
[0196][0197]
其中,满足4l/(n-1)<c<min(g-4l,m-4l)。c
′
[m,g]的维度是c(n-1)
×
2。c
′
[m,g]的第一列是与空间(角度)域和频(延迟)域对应的扩大向量。第二列是与空间(角度)域和时(多普勒频率)域对应的扩大向量。可以证明,c
′
[m,g]的第一列的基向量由下式给出:
[0198][0199]
同样,c
′
[m,g]的第二列的基向量,表示为在将替换为的情况下与公式(12)的表述形式相同。
[0200]
接着,将c
′
[m,g]组合成矩阵,如下:
[0201]
c=[c
′
[0,0],c
′
[0,1],
…
,c
′
[0,d]],
ꢀꢀ
(13)
[0202]
其中满足c d<min(m,g)。对于c的多个列,基向量由和表示,其中l
′
∈{
±
1,
…
,
±
l}。因此,c的秩是4l。
[0203]
c的各列与所有的参数相关。然而,从c直接估计所有的参数将会非常具有挑战性。因此,下面提出了在3步内估计总共三个参数(延迟、多普勒频率、aoa)的软估计算法。
[0204]
1)步骤1:注意假设与los路径对应的参数对于bs是已知的。首先求解下面的问题来分别获得延迟和多普勒频率。
[0205][0206]
和
[0207][0208]
其中,表示取得与括号中函数的个最大峰值对应的个估计值的运算,τ
′
∈(0,π)和f
′
∈(-π,π)是测试值,是c的向量跨越的空间中的零空间,即与从第(4l 1)列到第c(n-1)列的各列对应的c的左奇异矩阵,使ω
l
′
和τ
′
l
分别为ω0和测试值-τ
′
,c1(ω0,-τ
′
)与公式(12)中的具有相同的表示形式。同样,使ω
l
′
和τ
′
l
分别为ω0和测试值-f
′
,c2(ω0,-f
′
)与具有相同的表示形式。实施中,针对延迟和多普勒频率两者获得估计值。这是因为许多估计值可能在上述问题中有多个峰。几乎肯定的是,在这些估计值中存在l实际参数。
[0209]
2)步骤2:延迟和多普勒频率的软估计值并不自动匹配到一个目标。因此,需要将每个延迟估计值与每个多普勒频率估计值配对。实施中,将该处理称为配对匹配(pair matching)。该过程还从个估计值过滤出实际的l对估计值。
[0210]
由于ω0对于感测接收器(bs)是已知的,所以可以利用ω0来进行配对匹配。从公式(14)和公式(15)获得的软估计值表示为和注意,存在种配对匹配的可能性,即:
[0211][0212]
实际的估计值对在将ξn[m,g]进行组合的下面的函数中应当具有最大组合增益。
[0213][0214]
实施中,可以首先选择使p
ξ
(l
x
,ly)的绝对值最大的个候选中的一个。假设获得的对中被选择的索引为可以从候选集合中去除这个对。因此,确定一对多普勒频率和延迟。在去除对之后,候选的数量减少到即接着匹配下一对多普勒频率和延迟。重复过程l次,可以匹配总共l对多普勒频率和延迟。
[0215]
3)步骤3:延迟和多普勒频率已经确定,仅需要顾及nlos aoa,ω
l
,l∈{1,
…
,l}。求解下面的问题l次并获得l个估计值。
[0216][0217]
其中ω
′
∈(-π,π)是测试值。对于每对延迟和多普勒频率,仅获得一个估计值作为nlos aoa估计值。因此,存在从公式(18)获得的l个nlos aoa估计值。
[0218]
图5为感测算法的示意图,所提出的信号处理方案如图5所示。
[0219]
基于同一发明构思,本发明实施例中还提供了一种接收器、感测参数估计装置、计算机可读存储介质,由于这些设备解决问题的原理与感测参数估计方法相似,因此这些设备的实施可以参见方法的实施,重复之处不再赘述。
[0220]
在实施本发明实施例提供的技术方案时,可以按如下方式实施。
[0221]
图6为接收器结构示意图,如图所示,包括:
[0222]
处理器600,用于读取存储器620中的程序,执行下列过程:
[0223]
获取来自多个发射器天线的上行链路通信信号;
[0224]
将所述通信信号进行cacc处理后进行感测算法处理获得感测参数,其中,所述cacc处理是指将所述通信信号作为参考信号,将其他天线的信号和该参考信号做相关运算;
[0225]
收发机610,用于在处理器600的控制下接收和发送数据。
[0226]
实施中,所述上行链路通信信号是每个ofdm分组的前导码。
[0227]
实施中,所述前导码是第m前导码符号的在第g副载波上传输的调制符号,其中,每个前导码符号具有g个副载波,副载波间隔为1/t,其中t表示ofdm符号的长度。
[0228]
实施中,第m前导码符号为:
[0229][0230]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号,并且表示长度为t tc的矩形窗口。
[0231]
实施中,将所述通信信号进行cacc处理,包括:
[0232]
接收到上行链路通信信号后,去除cp之后,通过g点fft将信号变换到频域信号,对频域信号进行cacc处理。
[0233]
实施中,所述频域信号为:
[0234][0235]
其中,是在第m ofdm前导码符号的第n接收天线处的第g副载波上的接收到的频域信号,并且是平均值为零且方差为σ2的复awgn。
[0236]
实施中,对频域信号进行cacc处理前,进一步包括:
[0237]
抵消前导码的模量效应。
[0238]
实施中,按以下方式抵消前导码的模量效应:
[0239][0240]
其中,x[m,g]是第m前导码符号的在第g副载波上传输的调制符号。
[0241]
实施中,按下式进行cacc处理:
[0242][0243]
其中,其中,并且
[0244]
实施中,进一步包括:
[0245]
在m和g上使用高通滤波器来获得高通分量。
[0246]
实施中,按如下方式获得高通分量后进行感测算法处理:
[0247][0248]
实施中,对后进行感测算法处理,包括:
[0249][0250]
其中,a(ω
l
′
)=exp[jω
l
′
(1,
…
,n-1)]是维度为(n-1)
×
1的阵列响应向量。
[0251]
实施中,进一步包括:
[0252]
将空间域与其他域进行组合用以扩大阵列响应向量的维数。
[0253]
实施中,按以下方式将空间域与其他域进行组合用以扩大阵列响应向量的维数:
[0254][0255]
其中,满足4l/(n-1)<c<min(g-4l,m-4l),c
′
[m,g]的维度是c(n-1)
×
2,c
′
[m,g]的第一列是与空间角度域和频延迟域对应的扩大向量,第二列是与空间角度域和时多普勒频率域对应的扩大向量。
[0256]
实施中,按如下方式将c
′
[m,g]形成矩阵:
[0257]
c=[c
′
[0,0],c
′
[0,1],
…
,c
′
[0,d]],
ꢀꢀ
(13)
[0258]
其中满足c d<min(m,g),对于c的多个列,基向量由和表示,其中l
′
∈{
±
1,
…
,
±
l}。
[0259]
实施中,所述感测参数包括以下参数之一或者其组合:
[0260]
传播延迟、多普勒频率、aoa。
[0261]
实施中,按以下方式确定传播延迟和多普勒频率:
[0262][0263]
和
[0264][0265]
其中,表示取得与括号中函数的个最大峰值对应的个估计值的运算,τ
′
∈(0,π)和f
′
∈(-π,π)是测试值,是c的向量跨越的空间中的零空间,即与从第(4l 1)列到第c(n-1)列的各列对应的c的左奇异矩阵,使ω
l
′
和τ
′
l
分别为ω0和测试值-τ
′
,c1(ω0,-τ
′
)与公式(12)中的具有相同的表示形式,使ω
l
′
和τ
′
l
分别为ω0和测试值-f
′
,c2(ω0,-f
′
)与具有相同的表示形式,其中:c
′
[m,g]的第一列是与空间(角度)域和频(延迟)域对应的扩大向量,c
′
[m,g]的第一列的基向量:
[0266]
[0267]
实施中,进一步包括:
[0268]
将每个延迟估计值与每个多普勒频率估计值配对匹配。
[0269]
实施中,将每个延迟估计值与每个多普勒频率估计值配对匹配,包括:
[0270]
从公式(14)和公式(15)获得的软估计值表示为和存在种配对匹配的可能性,即:
[0271][0272]
实际的估计值对在将ξn[m,g]进行组合的下面的函数中应当具有最大组合增益:
[0273][0274]
选择使p
ξ
(l
x
,ly)的绝对值最大的个候选中的一个,假设获得的对中被选择的索引为从候选集合中去除这个对,确定一对多普勒频率和延迟;
[0275]
在去除对之后,候选的数量减少到即匹配下一对多普勒频率和延迟;
[0276]
重复过程l次,匹配总共l对多普勒频率和传播延迟。
[0277]
实施中,进一步包括:
[0278]
根据传播延迟和多普勒频率估计aoa。
[0279]
实施中,根据传播延迟和多普勒频率估计aoa,包括:
[0280]
确定传播延迟和多普勒频率后,从公式(18)获得l个nlos aoa估计值:
[0281][0282]
其中,ω
′
∈(-π,π)是测试值,对于每对延迟和多普勒频率,获得一个估计值作为nlos aoa估计值。
[0283]
其中,在图6中,总线架构可以包括任意数量的互联的总线和桥,具体由处理器600代表的一个或多个处理器和存储器620代表的存储器的各种电路链接在一起。总线架构还可以将诸如外围设备、稳压器和功率管理电路等之类的各种其他电路链接在一起,这些都是本领域所公知的,因此,本文不再对其进行进一步描述。总线接口提供接口。收发机610可以是多个元件,即包括发送机和接收机,提供用于在传输介质上与各种其他装置通信的单元。处理器600负责管理总线架构和通常的处理,存储器620可以存储处理器600在执行操作时所使用的数据。
[0284]
本发明实施例中还提供了一种感测参数估计装置,包括:
[0285]
接收模块,用于利用接收器获取来自多个发射器天线的上行链路通信信号;
[0286]
处理模块,用于将所述通信信号进行cacc处理后进行感测算法处理获得感测参数,其中,所述cacc处理是指将所述通信信号作为参考信号,将其他天线的信号和该参考信号做相关运算。
[0287]
具体实施可以参见感测参数估计方法的实施。
[0288]
为了描述的方便,以上所述装置的各部分以功能分为各种模块或单元分别描述。当然,在实施本发明时可以把各模块或单元的功能在同一个或多个软件或硬件中实现。
[0289]
本发明实施例中还提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有执行上述感测参数估计方法的计算机程序。
[0290]
具体实施可以参见感测参数估计方法的实施。
[0291]
综上所述,在本发明实施例提供的技术方案,解决了使用上行链路通信信号进行感测参数估计中的问题:异步的发射器和接收器;天线数量少的接收器。
[0292]
上行链路通信中几何分离的发射器和接收器通常在时钟级别上异步。由时钟异步引起的定时偏移在分组之间变化。这样的异步通常将在感测期间引入定时模糊并因此引入测距模糊,并且妨碍使用多个分组来进行感测参数估计。
[0293]
对于小型基站,阵列中天线元件的数量通常受到限制。因此,估计多路径信号到达角的能力受到限制。更具体地说,能够估计的路径数量通常等于或小于天线数量的一半。
[0294]
在本方案中,基于跨天线互相关(cross-antenna cross correlation,cacc)运算,这使得能够将上行链路通信信号直接用于无线电感测,而无需在当前网络中进行任何重大改变。还能够估计数量比天线数量多得多的路径,因此在小型基站中进行感测也变得可能。
[0295]
所需的系统设置是发射器和接收器之间存在视线(line-of-sight,los)无线连接,并且los路径的功率比nlos路径高得多,并且发射器和接收器(bs)都固定在适当的位置。
[0296]
本方案能够使用跨天线互相关输出有效地估计传播路径参数延迟、aoa和多普勒频率;和,综合了不同域(即,频域、时域和空间域)中的测量值,并将它们联合用于参数估计。
[0297]
提出的方案的效果可以总结至少有如下之一的效果:
[0298]
1)消除异步收发器之间的时钟级别定时偏移,从而使得能够直接使用上行链路通信信号进行无线电感测,而无需在当前移动网络中进行任何重大更改;
[0299]
2)能够估计数量比天线数量多得多的路径的aoa,因此在小型基站中进行感测也是可能的;
[0300]
3)在一种算法中对延迟、aoa和多普勒参数进行综合估计;
[0301]
4)实现比现有方案更好的感测性能。
[0302]
下面用仿真结果来进行说明。
[0303]
下面提供了仿真结果来验证所提出的方案。载波频率是3.5ghz。ofdm系统副载波的数量为g=256。频带宽度是256mhz。因此,ofdm符号周期t是1us,cp周期tc是0.25us。两个分组之间的近似间隔ta是1ms。使用m=128分组中的前导码ofdm符号用于感测参数估计。传播延迟随机分布在[0,0.25]us,并且多普勒频率随机分布在[-0.2,0.2]khz。假设bs具有n=4天线元件的ula。除非另外陈述,假设有一个los路径和从3个目标反射或折射的l=
3nlos路径。los路径的大小是10db,高于nlos路径的大小。
[0304]
图7为ξn[m,g]的mse与snr和路径数量的关系示意图,图7示出了ξn[m,g]的均方误差(mse),定义为ξn[m,g]的mse反映了构造的高通信号的准确度并且直接影响下面的感测参数估计。测试了两种方法来滤掉低通分量。一个是本发明实施例中提出的方案。另一个是ams方法。为了简化,减去ξn[m,g]的平均值来实现高通滤波器。结果清楚的显示本发明实施例提出的方案胜过ams方法。值得指出的是,当使用的滤波器对于l=1目标随着snr增大而线性减小。这表明当仅有一个目标时,ξn[m,g]的输入误差可以足够小。这是因为,当l=1时,也是低通分量,并且当存在多个目标时,mse接近固定水平,该固定水平为的平均功率。
[0305]
图8为所有三个参数的mse与snr的关系示意图,图8示出了所有三个参数的归一化mse(nmse)与snr的关系。对于本发明实施例中提出的软估算方案的初始化,将c设置为60,d为50,为5,这满足它们各自的范围要求。在高snr时,延迟和多普勒的nmse令人满意,都低于0.01。由于天线数量少,aoa的nmse有点大。对于本发明实施例中提出的方案,可以观察到误差底限。此误差底限是由ξn[m,g]的误差引起的,无法通过提高snr来消除。
[0306]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器和光学存储器等)上实施的计算机程序产品的形式。
[0307]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0308]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0309]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0310]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。